

Курсовая по ОТУ
.DOCЗадание
Спроектировать систему управления с заданной структурной схемой
ОУ P

![]()

![]()

![]()
![]()
![]()
![]()



P- Регулятор
ОУ - объект управление
по заданным показателям качества:
|
|
Значение
параметров
|
Заданные показатели качества |
|||
|
|
|
|
|
||
|
|
|
|
|
|
|
1. Исходя из заданной величины
установившейся ошибки
![]() определить требуемый коэффициент
передачи регулятора
определить требуемый коэффициент
передачи регулятора
![]()

2. Ввести полученную передаточную
функцию Wp(s)=Kp*
Wo
(s) и
определить устойчивость и показатели
качества tp,
![]() ,
,![]() y.
y.
Wp(s)=Kp*
Wo (s)
=
 =
=
![]()
Частота среза: 215.5703
Запас по фазе: -88.4023
Частота пи: 10.0000
Запас по модулю: -84.4370

Расположение корней на корневой плоскости:

Система не будет устойчива, т.к. ХУ имеет корни в правой полуплоскости.
![]() ,
,
![]()
3. Осуществить ручной синтез желаемой
передаточной функций
![]() в следующем порядке:
в следующем порядке:
3.1 По заданному времени регулирование
![]() определить начальную частоту
среза системы
определить начальную частоту
среза системы
![]() и задать асимптоту
и задать асимптоту
![]() с наклоном -20 дБ/дек
с наклоном -20 дБ/дек


-20дб/дек


![]()

![]()


![]() с
с![]()

![]()
Выбираем
![]()
3.2 Задать запасы по амплитуде
![]() и
и
![]() порядка (20÷25) дБ.
порядка (20÷25) дБ.
Выбираем
![]() дБ,
дБ,
![]()
3.3 Осуществить стыковку с характеристикой
![]() асимптотами с типовыми наклонами -20,
-40 или -60 дБ/дек.
асимптотами с типовыми наклонами -20,
-40 или -60 дБ/дек.
Выбираем схему стыковки с типовым наклоном -60 дБ/дек:
-60
-60
-20
-20











![]()

![]()
![]()
![]()



![]() дБ
дБ
![]()


![]()
![]()
![]()

3.4 Восстановить передаточную функцию
желаемой системы
![]() .
.

Пример стыковки для
![]()
![]() ,
,
![]() ,
,
![]() .
.

3.5 Ввести в ПЭВМ и рассчитать показатели
качества:
![]() ,
,
![]() ,
,
![]() .
Привести положение корней, ЛЧХ,
вид переходного процесса.
.
Привести положение корней, ЛЧХ,
вид переходного процесса.
Модель: "Разомкнутая система"
Нули:
z1 = -0.095000
z2 = -0.095000
Полюсы:
p1 = 0.000000
p2 = -0.000292
p3 = -0.000292
p4 = -3242.318995
p5 = -3242.318942
Частота среза: 0.9541
Запас по фазе: 78.6292
Частота пи: 3242.1295
Запас по модулю: 76.7303
Модель: "Замкнутая система"
Установившееся значение: 10.0000
Время регулирования: 9.988 с
Перерегулирование: 13.01%
Нули:
z1 = -0.094838
z2 = -0.095163
Полюсы:
p1 = -0.709621
p2 = -0.161893
p3 = -0.074262
p4 = -3186.491904
p5 = -3297.200904
Абсолютное затухание: 0.074
Относительное затухание: 0

3.6 Изменяя положение частоты среза и
запасы
![]() ,
,
![]() провести итерационную процедуру
минимизации времени переходного
процесса. Привести графики зависимости:
провести итерационную процедуру
минимизации времени переходного
процесса. Привести графики зависимости:
![]() и
и
![]() .
.
2) Показатели качества системы при
![]() ,
,
![]() ,
,
![]() ,
,
![]()
![]() дБ
дБ
Частота среза: 1.1555
Запас по фазе: 78.6266
Частота пи: 2931.6978
Запас по модулю: 74.1922
Установившееся значение: 10.0000
Время регулирования: 8.9319 с
Перерегулирование: 13.18%
3) Показатели качества системы при
![]() ,
,
![]() ,
,
![]() ,
,
![]()
![]() дБ
дБ
Частота среза: 1.3577
Запас по фазе: 78.6280
Частота пи: 2718.0880
Запас по модулю: 72.1342
Установившееся значение: 10.0000
Время регулирования: 7.6061 с
Перерегулирование: 13.285%
4) Показатели качества системы при
![]() ,
,
![]() ,
,
![]() ,
,
![]()
![]() дБ
дБ
Частота среза: 1.5540
Запас по фазе: 78.5838
Частота пи: 2584.3822
Запас по модулю: 70.5238
Установившееся значение: 10.0000
Время регулирования: 6.6310 с
Перерегулирование: 13.35%
|
|
0.95 |
1.1555 |
1.3577 |
1.5540 |
|
|
9.988 |
8.9319 |
7.6061 |
6.6310 |
|
|
-70.03 |
-68.19 |
-66.25 |
-64.44 |
|
|
13.01% |
13.18% |
13.28% |
13.35% |
График зависимости
![]() .
.
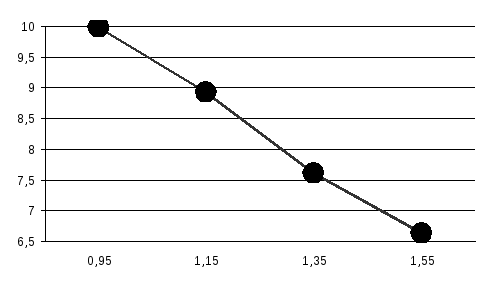
График зависимости
![]() .
.

4. Для полученного
![]() записать
записать
![]() и рассчитать последовательную коррекцию
и рассчитать последовательную коррекцию
![]() в регулятор и провести проверочный
расчет показателей качества.
в регулятор и провести проверочный
расчет показателей качества.
Таким образом, из п.3.6 можно сделать
вывод, что минимальное время регулирования
желаемой системы
![]() с,
достигается при
с,
достигается при
![]() .
.
Запишем
![]() при
при
![]() ,
,
![]() ,
,
![]()

Последовательная коррекция имеет вид:

Проверочный расчёт показателей качества
при последовательном включении звена
коррекции
![]() и
и
![]() :
:
Модель: "Разомкнутая система"
Частота среза: 1.5540
Запас по фазе: 78.5838
Частота пи: 2584.3822
Запас по модулю: 70.5238
Модель: "Замкнутая система"
Установившееся значение: 10.0000
Время регулирования: 6.6310 с
Перерегулирование: 13.35%
Как видно показатели качества в точности
совпали с показателями качества
![]() при
при
![]() .
.
5. Дать вывод по работе.
В курсовой работе был проведён синтез системы управления, включающий этапы анализа имеющейся системы, синтеза желаемой системы и этап коррекции.
В качестве метода коррекции была
использована последовательная коррекция,
позволяющая легко находить передаточную
функцию регулятора, но имеющая высокую
чувствительность к параметрическим
возмущениям. В качестве оптимального
был выбран вариант системы с наименьшим
временем регулирования, достигающимся
при
![]() ,
при этом перерегулирование удовлетворяет
заданному ограничению в 35%.
,
при этом перерегулирование удовлетворяет
заданному ограничению в 35%.