

8.4. Алгоритмы распределения динамической памяти
Менеджер кучи — это компонент исполняющей системы, который выделяет и освобождает память. Это делается посредством поддержки списка свободных блоков. Когда сделан запрос на выделение памяти, она ищется в этом списке, а при освобождении блок снова подсоединяется к списку свободных блоков. Разработчик исполняющей системы должен рассмотреть много вариантов и принять проектные решения, в частности по порядку обработки блоков, их структуре, порядку поиска и т. д.

.
С распределением динамической области памяти связана проблема фрагментации. На рисунке 8.6 показана ситуация, когда сначала были выделены пять блоков памяти, а затем второй и четвертый освобождены. Теперь, хотя доступны 1000 байтов, невозможно выделить больше 600 байтов, потому что память раздроблена на небольшие блоки. Даже когда третий блок освободится, памяти будет достаточно только при условии, что менеджер кучи «умеет» сливать смежные свободные блоки.
В добавление к слияниям менеджер кучи может предупреждать фрагментацию, отыскивая блок подходящего размера, а не просто первый доступный, или выделяя большие блоки из одной области динамической памяти, а небольшие блоки — из другой. Существует очевидный компромисс между сложностью менеджера и издержками времени выполнения.
Программист должен знать используемые алгоритмы управления динамической памятью и писать программу с учетом этих знаний.
Другая возможность ослабить зависимость от алгоритмов работы менеджера кучи — это завести кэш освобождаемых блоков. Когда блок освобождается, он просто подсоединяется к кэшу. Когда необходимо выделить блок, сначала проверяется кэш; это позволяет избежать издержек и фрагментации, возникающих при обращениях к менеджеру кучи.
В Ada есть средство, которое позволяет программисту задать несколько куч разного размера, по одной для каждого типа указателя. Это позволяет предотвратить фрагментацию, но повышает вероятность того, что в одной куче память будет исчерпана, в то время как в других останется много свободных блоков.
Виртуальная память
Есть один случай, когда распределение динамической памяти совершенно надежно — это когда используется виртуальная память. В системе с виртуальной памятью программисту предоставляется настолько большое адресное пространство, что переполнение памяти фактически невозможно. Операционная система берет на себя распределение логического адресного пространства в физической памяти, когда в этом возникает необходимость. Когда физическая память исчерпана, блоки памяти, называемые страницами, выталкиваются на диск.
С помощью виртуальной памяти менеджер кучи может продолжать выделение динамической памяти почти бесконечно, не сталкиваясь с проблемой фрагментации. Единственный риск — это связанная с виртуальной памятью ситуация пробуксовки (thrashing), которая происходит, когда код и данные, требуемые для фазы вычисления, занимают так много страниц, что в памяти для них не хватает места. На подкачку страниц тратится так много времени, что вычисление почти не продвигается.
Сборка мусора
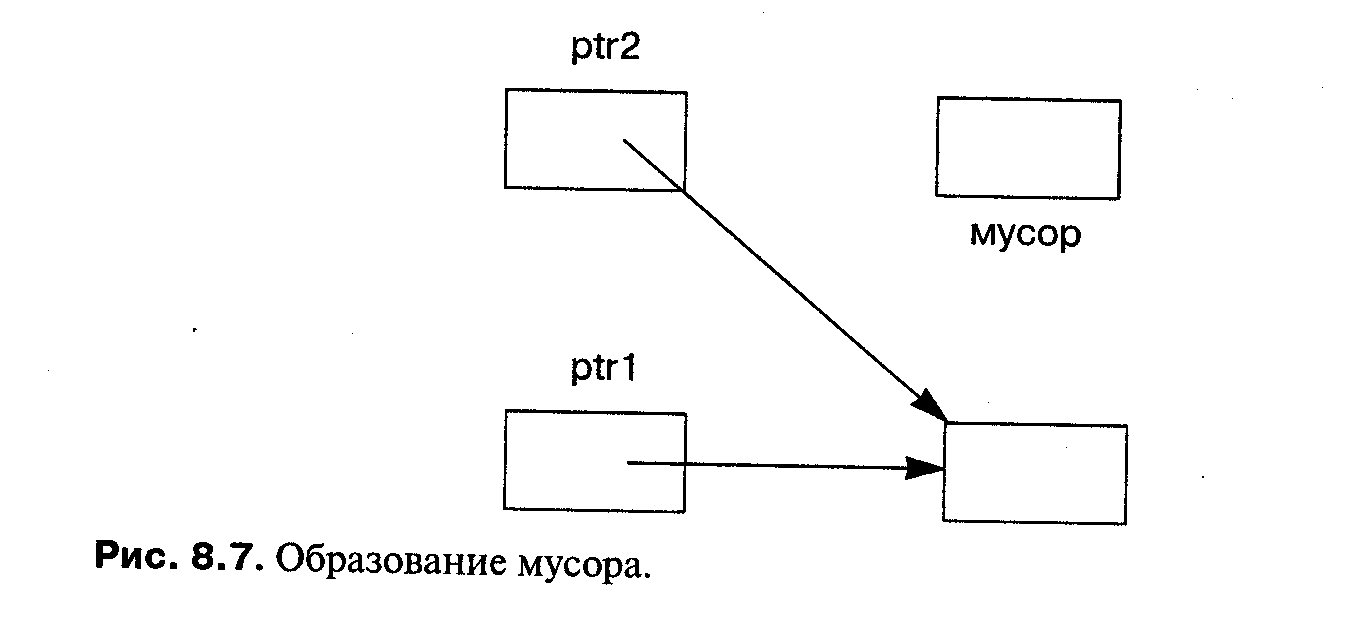
Последняя проблема, связанная с динамической памятью, — образование мусора (garbage), например:
int *ptr1 = new int; // Выделить первый блок
C |
ptr2 = ptrl; // Второй блок теперь недоступен
После оператора присваивания второй блок памяти доступен через любой из указателей, но нет никакого способа обратиться к первому блоку (см. рис. 8.7). Это может и не быть ошибкой, потому что память, к которой нельзя обратиться, (называемая мусором) не может вам помешать. Однако, если продолжается утечка памяти, т. е. образуется мусор, в конечном счете программа выйдет из строя из-за недостатка памяти. Чрезвычайно трудно локализовать причину утечки памяти, потому что нет прямой связи между причиной и симптомом (недостатком памяти).
Очевидное решение состоит в том, чтобы не создавать мусор, прежде всего тщательно заботясь об освобождении каждого блока до того, как он станет недоступен. Кроме того, исполняющая система языка программирования может содержать сборщик мусора (garbage collector). Задача сборщика мусора состоит в том, чтобы «повторно использовать» мусор, идентифицируя недоступные блоки памяти и возвращая их менеджеру динамической памяти. Существует два основных алгоритма сборки мусора: один из них для каждого блока
ведет счетчик текущего числа указателей, ссылающихся на этот блок, и автоматически освобождает блок, когда счетчик доходит до нуля. Другой алгоритм отмечает все доступные блоки и затем собирает немаркированные (и, следовательно, недоступные) блоки. Первый алгоритм проблематичен, потому что группа блоков, каждый из которых является мусором, могут указывать друг на друга так, что счетчик никогда не сможет уменьшиться до нуля. Второй алгоритм требует прерывания вычислений на длительные периоды времени, чтобы маркировку и сбор можно было выполнить без влияния вычислений. Это, конечно, недопустимо в интерактивных системах.
Сборка мусора традиционно выполняется в таких языках, как Lisp и Icon, которые создают большое число временных структур данных, быстро становящихся мусором. Проведены обширные исследования по сборке мусора; особое внимание в них уделено параллельным и пошаговым методам, которые не будут нарушать интерактивные вычисления или вычисления в реальном масштабе времени. Eiffel — один из немногих процедурных языков, которые включают сборщики мусора в свои исполняющие системы.