


ФЕДЕРАЛЬНОЕ АГЕНСТВО ПО ОБРАЗОВАНИЮ
САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ АРХИТЕКТУРНО-СТРОИТЕЛЬНЫЙ УНИВЕРСИТЕТ
Факультет автомобильно-дорожный
Кафедра Транспортно-технологических машин и оборудования
Дисциплина: Теория механизмов и машин
Курсовой проект по теории
и механизмов и машин
«Кинематическое и динамическое исследование машины с кривошипно-ползунным механизмом»
(Компрессор 2-цилиндровый простого действия)
Выполнил студент группы 1-CТ-2 В.В. Богданов _______________
Проект защищен с оценкой: _______________________________
Доцент кафедры ТТМ А.А. Иванова _________________________
СПб 2010
Содержание
Содержание…………………………………………………………………………………..2
1. КИНЕМАТИЧЕСКОЕ ИССЛЕДОВАНИЕ КРИВОШИПНО-ПОЛЗУННОГО МЕХАНИЗМА……………………………………………………………………………………..3
1.1 Определение геометрических параметров звеньев для построения кинематической схемы………………………………………………………………………….4
1.2 Определение величин скоростей и построение планов скоростей…….................6
1.3 Определение величин ускорений и построение планов ускорений……………….8
1.4 Проверка расчетов…………………………………………………………………………11
1.5 Построение
диаграмм:![]() ……………………………….11
……………………………….11
2. УРАВНОВЕШИВАНИЕ СИЛ ИНЕРЦИИ И РАСЧЕТ ПРОТИВОВЕСА…............12
2.1 Расчет замещающих масс………………………………………………………………..13
2.2 Расчет сил инерции и построение годографа сил инерции без противовеса……………………………………………………………………………………..13
2.3 Расчет сил с противовесом………………………………………………………...........13
2.4 Расчет противовеса……………………………………………………….......................14
3. ВЫРАВНИВАНИЕ УГЛОВОЙ СКОРОСТИ ВАЛА КОМПРЕССОРА С ПОМОЩЬЮ МАХОВИКА………………………………………………………......................15
3.1 Расчет и построение графиков приведенного к пальцу кривошипа момента инерции компрессора и энергии вращения приведенных масс.……………………….15
3.2 Определение избыточной работы сил полезного сопротивления ………………..16
3.3 Графическое интегрирование, график избыточной работы……………………..…17
3.4 Построение диаграммы энергомасс и определение момента инерции маховика………………………………………………………………………..........................18
1Кинематическое исследование кривошипно-ползунного механизма.
Целью является определение перемещения Sb, скорости Ub, ускорения Wb точки B механизма. Выполняется расчетно-графическим методом с помощью планов скоростей и ускорений, для выбранных положений механизма в интервале одного полного оборота кривошипа. Построение их основано на представлении о характере движения звеньев и их точек.

I - кривошип, II - шатун, III - ползун, IV – стойка(опора).
r – радиус кривошипа, l – длина шатуна
1. 1)Число подвижных звеньев механизма n=n0-1
n0 – общее число звеньев, n=4-1, n=3
2)Кинематические пары - Р
P1: 1-4 [1В] P2=0 P3=0
1-2 [1В]
2-3 [1В]
3-4 [1П]
3) Подвижность плоского механизма Wn=3n-(2P1+P2)
Wn=3*3-(2*4+0), Wn=1,
это значит, что для того, чтобы определить выходные параметры механизма достаточно задать одно значение входного параметра.
1.1 Определение перемещений и построение плана положений механизма
1) Масштабный коэффициент для схемы механизма
Ks=![]() ,
Ks=
,
Ks=![]() ,
где
,
где
![]() -
длина кривошипа на чертеже, принимаем
-
длина кривошипа на чертеже, принимаем
![]() , тогда
, тогда
![]() ;
;
![]() .
.
2)
![]() ,
,
 .
.
3)
![]() .
.
На чертеже строим 8
основных положений кривошипа механизма
с интервалом
![]() ,
нумеруем положения точки А,
начиная с
,
нумеруем положения точки А,
начиная с
![]() ,
против часовой стрелки через
.
Известно, что экстремальные значения
скорости точки В достигается при углах
,
против часовой стрелки через
.
Известно, что экстремальные значения
скорости точки В достигается при углах
![]() и
и
![]() , определяем их из
условия, что
, определяем их из
условия, что
![]() ,
,
![]() - дано, тогда
- дано, тогда
![]() ,
а
,
а
![]() .
В этих точках Ub=max,
а ускорение Wb=0.
Две точки дополнительного положения
механизма.
.
В этих точках Ub=max,
а ускорение Wb=0.
Две точки дополнительного положения
механизма.

Величины перемещения
поршня
![]() ;
;
![]() -
перемещение поршня в i-том
положении.
-
перемещение поршня в i-том
положении.

Откладываем на оси Х точки 0, 8, соответствующие началу хода поршня, для этого необходимо, длину кривошипа r на чертеже и шатуна l наложить на ось Х r+l. от точки 0 откладываем заданный максимальный ход поршня S4 = 100мм на чертеже.
Откладываем от точек 1, 1’, 2, 3, 4, 5, 6, 6’, 7 длину шатуна в масштабе чертежа. Откладываем от данных точек до пересечения с осью Х и наносим на ось Х точки1, 7; 1’, 6’; 2, 6; 3, 5; 4.
Строим на чертеже длины
хода поршня от начальной точки 0, 8
![]() .
Находим действительный ход поршня в
метрах
.
Находим действительный ход поршня в
метрах
![]() .
Полученные значения заносим в таблицу
1:
.
Полученные значения заносим в таблицу
1:
Табл. 1 |
|
|
Позиция |
|
Sb, м |
0 |
0 |
0 |
1 |
19 |
0,047 |
1' |
46 |
0,11 |
2 |
56 |
0,14 |
3 |
89 |
0,22 |
4 |
102 |
0,25 |
5 |
89 |
0,22 |
6 |
56 |
0,14 |
6' |
46 |
0,11 |
7 |
19 |
0,047 |
8 |
0 |
0 |
1.2 Определение величин скоростей и построение плана скоростей.
Абсолютная скорость точки А:
![]() ,
м/с , где
,
м/с , где
![]() -
угловая скорость кривошипа; r
– радиус кривошипа.
-
угловая скорость кривошипа; r
– радиус кривошипа.
![]() ,
n1
= 190 об/мин – дано,
,
n1
= 190 об/мин – дано,
![]() =19.8
рад/сек, Ua=2,88
м/сек = const.
=19.8
рад/сек, Ua=2,88
м/сек = const.
Н аходим
масштабный коэффициент плана скоростей
аходим
масштабный коэффициент плана скоростей
![]() .
.
![]() -
длина вектора скорости на чертеже,
принимаем
=100мм.
-
длина вектора скорости на чертеже,
принимаем
=100мм.![]() .
.
Построение плана скоростей. Пример для точки 1.
1) Из полюса
![]() -
скоростей проводим
линию действия вектора скорости точки
В.
-
скоростей проводим
линию действия вектора скорости точки
В.
2) От полюса откладываем
в масштабе чертежа
![]() .
.
3) Откладываем из точки
а вектор на чертеже
![]() - это вектор относительного
вращательного движения точки В вокруг
точки А, при не связанном шатуне. Искомая
точка b
даст длину отрезка скорости
- это вектор относительного
вращательного движения точки В вокруг
точки А, при не связанном шатуне. Искомая
точка b
даст длину отрезка скорости
![]() .
.

Таким образом
![]() 70
мм.
70
мм.
4) Угловая скорость
шатуна
![]() :
:
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
=6,72
рад/сек.
,
=6,72
рад/сек.
Аналогично строим планы скоростей для остальных позиций кривошипа, находим значения угловой скорости шатуна и полученные значения заносим в таблицу 2.
Табл. 2 |
Ku= |
0,0188 |
Ua=1,88m/s |
Ua=100mm |
w1=18,8 rad/s |
Позиция |
Uba , мм |
Uba, м/с |
w2, рад/с |
Ub, мм |
Ub, м/с |
0 |
100 |
2,48 |
9,92 |
0 |
0 |
1 |
70 |
1,68 |
6,72 |
80 |
1,98 |
1' |
2 |
0,48 |
1,92 |
102 |
2,52 |
2 |
0 |
0 |
0 |
100 |
2,48 |
3 |
70 |
1,68 |
6,72 |
63 |
1,5 |
4 |
100 |
2,48 |
9,92 |
0 |
0 |
5 |
70 |
1,68 |
6,72 |
63 |
1,5 |
6 |
0 |
0 |
0 |
100 |
2,48 |
6' |
20 |
0,48 |
1,92 |
102 |
2,52 |
7 |
70 |
1,68 |
6,72 |
80 |
1,98 |
8 |
100 |
2,48 |
9,92 |
0 |
0 |
3. Планы ускорений, определение величин ускорений. Ускорение точки А.

![]() .
.
![]() ,
,
![]() 49,4
м/с2 ,
т. к.
,
то
49,4
м/с2 ,
т. к.
,
то
![]() и
и
![]() .
Тогда полное ускорение
точки А:
.
Тогда полное ускорение
точки А:
![]() .
.
Масштабный коэффициент планов ускорений:
![]() ,
,![]() ,
,
![]() 0,494(м/с2)/
0,494(м/с2)/
![]() .
.
Нормальная составляющая ускорения точки В относительно точки А равно
![]() ,
где
,
где
![]() берем
из плана скоростей. АВ – длина шатуна,
берем
из плана скоростей. АВ – длина шатуна,
![]() → Вычисляем значения
→ Вычисляем значения
![]() и переводим его в отрезки вектора
и переводим его в отрезки вектора
![]() ,
при
0,494(м/с2)/
,
определяем для всех положений механизма
по формуле
,
при
0,494(м/с2)/
,
определяем для всех положений механизма
по формуле
![]() ,
полученные значения заносим в таблицу
3.
,
полученные значения заносим в таблицу
3.
Табл. 3 |
Kw= |
0,353 |
|
Позиция |
w2 |
Wba, м/с2 |
Wba, мм |
0 |
9,92 |
23,04 |
47 |
1 |
6,72 |
11,2 |
22,8 |
1' |
1,92 |
0,92 |
1,87 |
2 |
0 |
0 |
0 |
3 |
6,72 |
11,2 |
22,8 |
4 |
9,92 |
23,04 |
47 |
5 |
6,72 |
11,2 |
22,8 |
6 |
0 |
0 |
0 |
6' |
1,92 |
0,92 |
1,87 |
7 |
6,72 |
11,2 |
22,8 |
8 |
9,92 |
23,04 |
47 |
У скорение
точки В,
скорение
точки В,
![]() .
Поскольку траектория
.
Поскольку траектория
точки В прямолинейна, то по этой прямой направлены ускорения точки В.
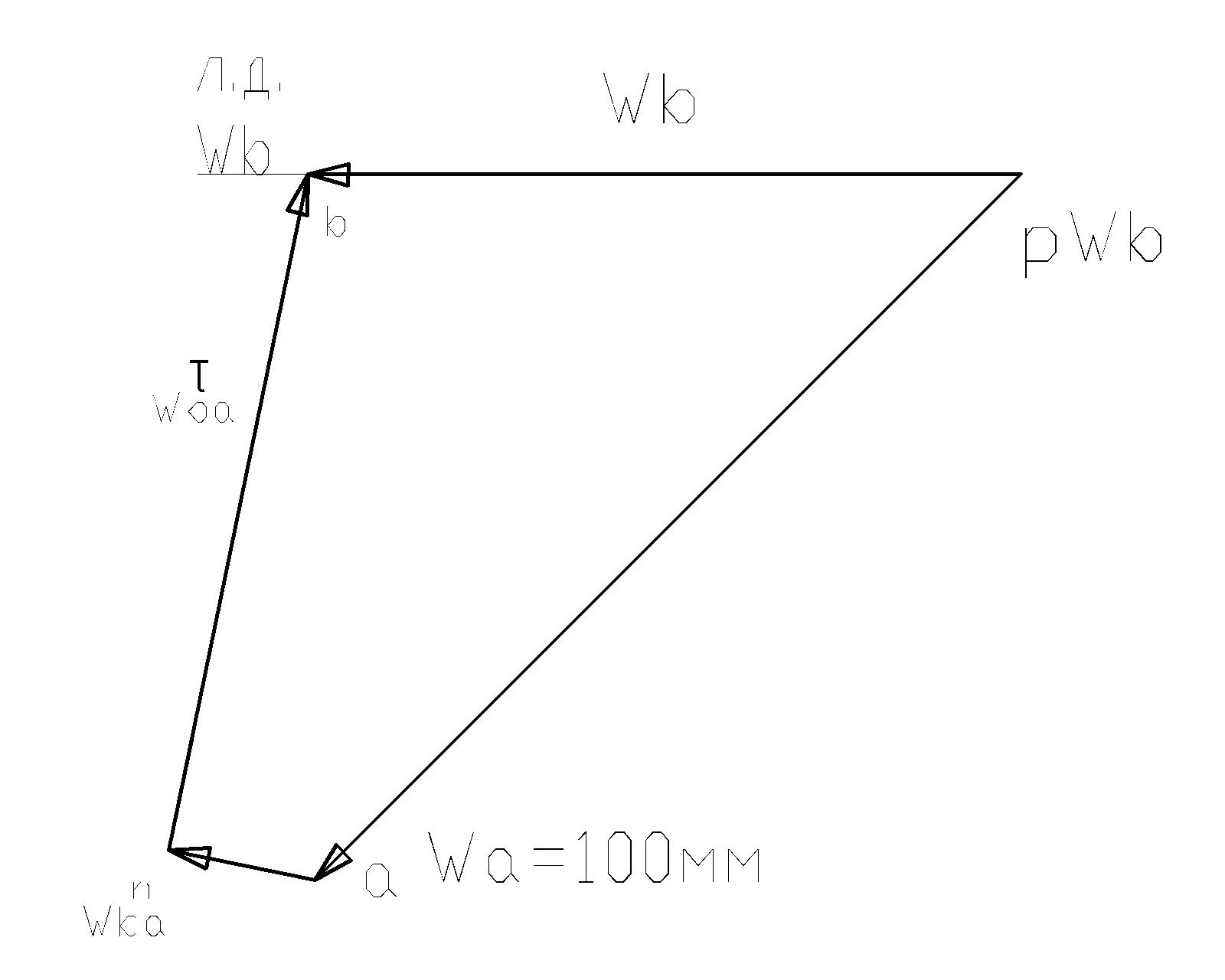
Порядок построения планов ускорений.
Из полюса
![]() проводим горизонталь, т.е. линию действия
ускорении точки
В. В масштабе
откладываем
проводим горизонталь, т.е. линию действия
ускорении точки
В. В масштабе
откладываем
![]() =100
мм. Из точки а
проводим в масштабе вектор ускорения
=100
мм. Из точки а
проводим в масштабе вектор ускорения
![]() параллельный АВ.
Из конца вектора
провести
параллельный АВ.
Из конца вектора
провести
![]() -р
до пересечения с линией
действия вектора Wb,
строим замыкающий вектор
-р
до пересечения с линией
действия вектора Wb,
строим замыкающий вектор
![]() .
.
Находим угловое
ускорение звена 2 из выражения
![]() следовательно
следовательно
![]() .
Полученные расчетно-графическим методом
значения Wb
можно проверить по формуле
.
Полученные расчетно-графическим методом
значения Wb
можно проверить по формуле
![]() ,
м/с2.
,
м/с2.
Полученные результаты расчетов заносим в таблицу 4.
Табл. 4 |
Kw= |
0,494 |
|
|
|
Позиция |
Wba, мм |
Wba, м/с2 |
e2, рад/с2 |
Wb, мм |
Wb, м/с2 |
0 |
0 |
0 |
0 |
14,4 |
70,56 |
1 |
70 |
34,3 |
137,2 |
8,2 |
40,18 |
1' |
102 |
49,9 |
199,9 |
0 |
0 |
2 |
100 |
49 |
196 |
20 |
9,8 |
3 |
70 |
34,4 |
137,2 |
56 |
27,44 |
4 |
0 |
0 |
0 |
58 |
28,46 |
5 |
70 |
34,4 |
137,2 |
56 |
27,44 |
6 |
100 |
49 |
196 |
20 |
9,8 |
6' |
102 |
49,9 |
199,9 |
0 |
0 |
7 |
70 |
34,4 |
137,2 |
8,2 |
40,18 |
8 |
0 |
0 |
0 |
14,4 |
70,56 |