

2. Силы и моменты, действующие на автомобиль при торможении. Обоснование и выбор характеристики тормозной системы
На рис. I приведена схема сил, действующих на автомобиль при торможении.
2.1. Расчетная схема автомобиля при торможении
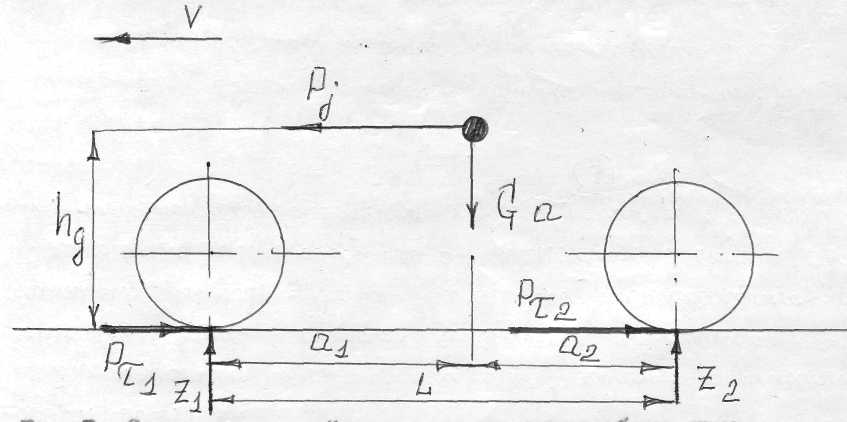
Рис. 1. Схема сил, действующих на автомобиль при торможении
На автомобиль при торможении действуют следующие силы:
Gа- сила тяжести автомобиля;
Z1, Z2 - нормальные реакции опорной поверхности;
Ру - боковые силы и Rу - боковые реакции (они будут только при криволинейном движении);
Рw - сила сопротивления воздуха.
Рх- продольные реакции дороги, которые можно считать равнодействующими нормальных сил;
Pf - сила сопротивления качению;
Рτ – сила торможения
Рх = Рτ + Pf
Pj- инерционная сила автомобиля в поступательном движении;
Mj - инерционный момент вращающихся масс.
2.2. Предельная тормозная сила, которая может быть реализована на колесе определяется формулой
Pτ max = φ·Zk (1)
где φ- коэффициент сцепления колеса с дорогой.
Если составить согласно схеме (рис. 1) два уравнения равновесия моментов относительно задней оси и решить их относительно неизвестных вертикальных реакций Z1 и Z2, то получим следующие расчетные зависимости
 (2)
(2)
где а1, а2 - координаты центра тяжести;
jτ - ускорение замедлений;
hq - высота центра тяжести;
L - база автомобиля;
Ga - вес автомобиля.
Как видно из формул (2), в процессе торможения автомобиля переменным величинам в них являются ускорения замедлений (jτ). Остальные величины: а1, а2, hq и Ga являются постоянными (они также будут переменными, если автомобиль будет порожним или загружен частично).
Определим предельное значение ускорений замедления из уравнений динамики. Пренебрегая сопротивлением качению (~ 3%), сопротивлением воздуха Pw (~2,3%), согласно рис 1 можно написать уравнение равновесия
Pj = Pτ1 + Pτ2 (3)
Раскроем это уравнение через массу автомобиля. Получим
![]() (4)
(4)
Сократив левую и правую части уравнения (4) на Ga, получим
![]() (5)
(5)
Из формулу (5) следует, что максимальные значения ускорений замедлений не зависят от веса (массы) автомобиля, а находятся в прямо пропорциональной зависимости от коэффициента сцепления φ, т.е. от дороги (коэффициент сцепления изменяется в широких пределах: от 0,1 до 0,8).
Рассмотрим один конкретный пример. Возьмем максимально возможное значение коэффициента сцепления φ = 0,8 (бетон, асфальтобетон и асфальт гладкий).
В результате этого получим
![]()
Таким образом, самые максимальные значения ускорений замедления, которые только можно получить при торможений автомобиля не могут быть больше 8 м/с2.
Пользуясь формулами (2), построим график изменения вертикальных (нормальных) реакций в функции замедлений - jτ (в функции дороги - φ).
Из графика (рис.2) можно сделать следующие выводы:
1. При торможении автомобиля вертикальные реакции на передней оси увеличиваются, а на задней оси - уменьшаются.
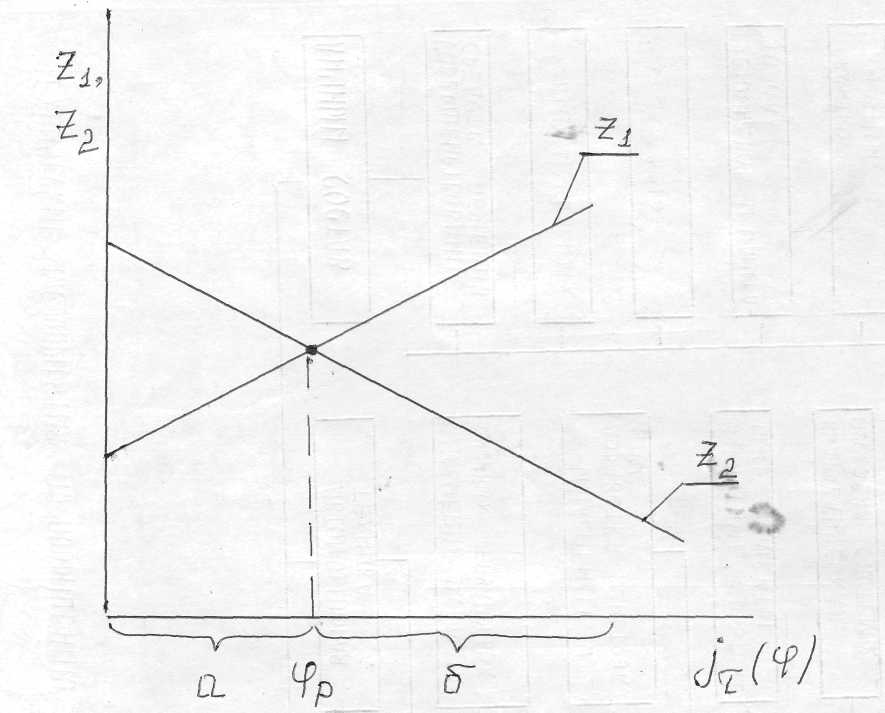
Рис.2. Изменения нормальных реакций на колесах автомобиля при торможении автомобиля
Это позволяет сделать важный вывод о том, что передняя ось автомобиля должна тормозиться эффективнее, чем задняя (привести примеры конструктивных решений для выполнения этого требования, например, на автомобиле ГАЗ-66).
2. Как видно из рис. 1, есть три зоны торможения
Зона "а" - если значения коэффициента сцепления небольшие, то вначале тормозится передняя ось, а задняя ось - недотормаживается. В этом случае, во-первых, торможение автомобиля в целом неэффективно, во-вторых, может произойти блокировка передних колес, которые, как известно, являются управляемыми и, в-третьих, тормозная сила на заднюю ось недостаточна.
Таким образом, торможение автомобиля в целом нельзя признать эффективным.
Зона "б" - при больших значениях коэффициента сцепления вначале тормозится задняя ось автомобиля, а передняя ось в этом случае недоторможивается.
И в этом случае, во-первых, торможение автомобиля также будет неэффективным и, во-вторых, блокировка задних колес может привести к заносу автомобиля. Таким образом, и в этом случае торможение автомобиля нельзя признать эффективным.
И третье - для каждого автомобиля есть только одно значение φp, при котором полностью используется сцепной вес автомобиля, т.е. когда обе оси автомобиля тормозятся на грани блокировки колес.
Последний вывод важен с точки зрения того, что при проектировании автомобиля необходимо закладывать такое значение φp (расчетное значение коэффициента сцепления), которое наиболее полно характеризует условия эксплуатации автомобиля (по асфальтированным дорогам, по щебеночной дороге, по улучшенной грунтовой дороге и т.д.)
3. Оси автомобиля необходимо тормозить в функции изменения вертикальных реакций на колесах (это можно обеспечить при применении регуляторов тормозных сил).
4. Оси автомобиля необходимо тормозить в функции дороги - (это можно обеспечить при установке антиблокировочной системы).
Так встает вопрос обоснования и выбора характеристики тормозной системы.
Вот примеры реальных значений φp для некоторых автомобилей:
1. Волга - φp = 0,46 (разбитая грунтовая дорога).
2. УАЗ - φp = 0,26 (песок).
3. ГАЗ-66 - φp = 0,25 (песок).
4. ЗИЛ-131 - φp = 0,31 (разбитая грунтовая дорога).
Как видим, многие значения φp не соответствуют наиболее характерным условиям эксплуатации автомобилей.
Рассмотрим характеристики регуляторов тормозных сил.
На рис. 3 представлена характеристика регулятора тормозных сил с компенсатором.
Из графика рис.3 следует, что до точки "а" давление на входе в регулятор и давление на выходе из регулятора одинаковое (Р1 = Р2). В точке "а" срабатывает компенсатор, в результате чего давление на выходе из регулятора будет меньше, чем давление на входе (Р1 ≠ Р2, Р1 > Р2).
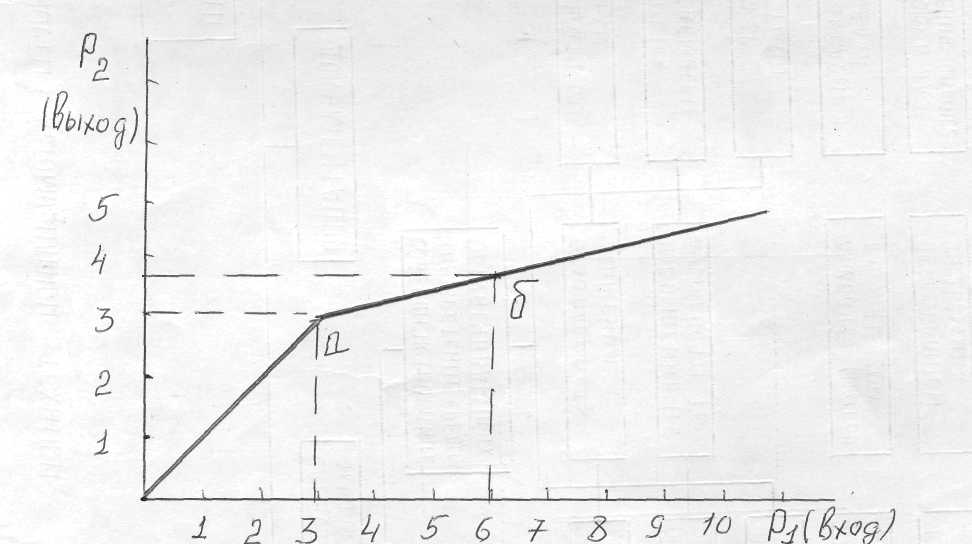
Рис.3. Характеристика регулятора с компенсатором
Таким образом, если связать давление воздуха (или жидкости), направляемого в тормозные камеры с нагрузкой на колесах автомобиля, то можно создавать в тормозных камерах давление в функции изменения нормальной нагрузки (реакций).
На рис.4 представлена характеристика лучевого регулятора. Из характеристики следует, что если нагрузка на среднюю и заднюю оси автомобиля одинаковая, то давление на входе и выходе из регулятора одинаковое, и, следовательно, оси автомобиля тормозятся одинаково.
Если же уменьшить нагрузку на заднюю ось, то уменьшается и нагрузка на выходе, а, следовательно, задняя ось тормозится менее эффективно.
Таким образом, связь давлений можно описать формулой
Р2 = iP1 , (6)
где i - передаточное число.
Передаточное число (I) выражает отношение площадей над поршнем и под поршнем регулятора тормозных сил автомобиля КамАЗ-5320.
Линия 1 графика (рис.4) соответствует полностью груженому автомобилю и определяет отношение давления на входе и выходе как
![]()
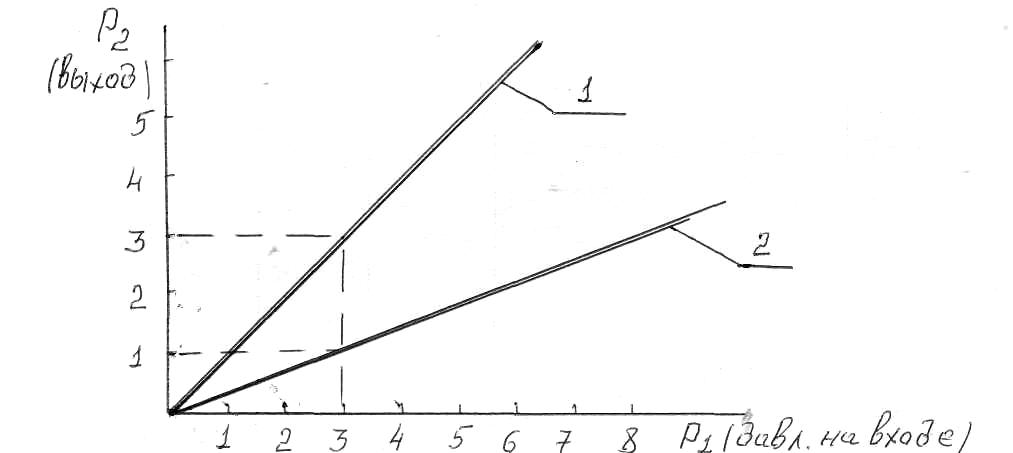
Рис.4. Характеристика лучевого регулятора тормозных сил (автомобиль КамАЗ-5320)
1 - автомобиль полностью загружен;
2 - автомобиль с частичной нагрузкой.
Если же уменьшить нагрузку на заднюю ось, то уменьшается и передаточное число (i) и тогда Р1 ≠ Р2, то есть Р2 будет меньше Р1, а следовательно задняя ось автомобиля тормозится менее эффективно, что и требуется.
Однако, автомобиль надо тормозить не только в функции нагрузки на колеса, но и в функции дороги (коэффициент сцепления). Это может быть обеспечено при применении на автомобилях антиблокировочных систем.