

78. Основные понятия теории автоматов. Автоматы Мили и Мура. Их аналитическое, табличное и графическое представление.
Абстрактный автомат – это математическая модель системы, обеспечивающая прием хранение и обработку информации.

Рис.1 Графическое изображение автомата
Х – множество, называемое входным алфавитом автомата;
Y - множество, называемое выходным алфавитом автомата;
Q – множество внутренних состояний автомата;
Для абстрактного автомата эти множества бесконечны. В реальных технических системах множества конечны, и автомат называется конечным.
Работа автомата заключается в следующем: на вход автомата подается послед-ность разрешенных входных значений, которые преобразуются в набор внутренних состояний. На выходе автомат генерирует выходную последовательность, которая зависит от входных значений и от внутреннего состояния. Внутреннее состояние представляет из себя некоторую память о прошлом и устраняет из работы автомата понятие времени.
Математически понятия автомата можно представить следующим образом:
A=(X, Y, Q, φ, ψ, q0)
X, Y, Q – определены выше;
Ψ – функция переходов ψ: эта ф-ция ставит в соответствие входному множеству Q и X новое множество состояний команд
φ – функция выходов φ: преобразует внутреннее состояние и входной сигнал в выходной сигнал

q0 – начальное состояние автомата.
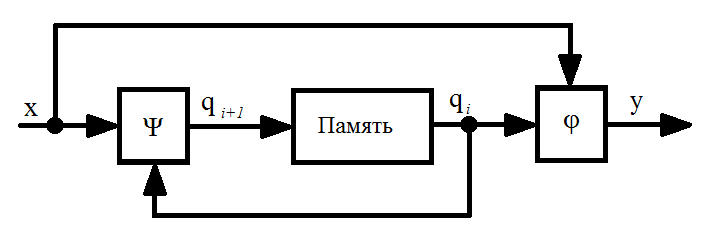
Рис. 2. Автомат Мили
Кроме автомата Мили существует автомат Мура у которых в отличие от автомата Мили выходные значения зависят только от внутреннего состояния.
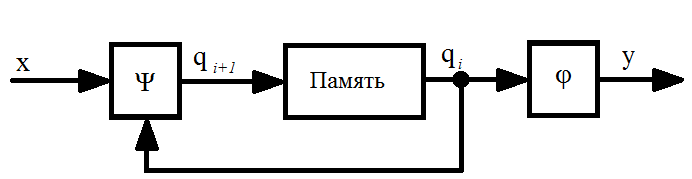
Рис. 3. Автомат Мура
В теории автоматов функции φ и ψ обычно не представляют аналитически, т.е. в какой то определенной форме, а имеют табличную форму представления.
Детерминированный автомат – функции перехода и выходы определены для всех входных сигналов. Если некоторые варианты функции не определены до конца (отсутствуют), то автомат называется частично определенным или недетерминированым.
Детерминированный автомат Мили (φ, ψ)
Текущее состояние, q |
Символы входного алфавита, х |
|||
x1 |
x2 |
… |
xn |
|
q1 |
q;y |
q;y |
… |
q;y |
q2 |
q;y |
… |
… |
… |
… |
… |
… |
… |
… |
qm |
… |
… |
… |
… |
Недетерминированный автомат Мили (φ, ψ)
Текущее состояние, q |
Символы входного алфавита, х |
|||
x1 |
x2 |
x3 |
x4 |
|
q1 |
q2;y1;y2 |
*;* |
*;* |
q |
q2 |
*;* |
q1;y1;y2 |
*;* |
q 3;y1;y2 |
q3 |
*;* |
*;* |
q4;y1;y2 |
*;* |
q4 |
q1;y1;y2 |
*;* |
*;* |
*;* |
 3;y1;y2
3;y1;y2

Недетерминированный автомат Мура (φ, ψ)
Текущее состояние, q |
Символы входного алфавита, х |
Символы выходного алфавита, ψ |
|||
x1 |
x2 |
x3 |
x4 |
||
q1 |
q2 |
* |
* |
q3 |
y1;y2 |
q2 |
* |
q1 |
q4 |
* |
y 1;y2 |
q3 |
* |
q4 |
* |
* |
y 1;y2 |
q4 |
* |
* |
q1 |
* |
y 1;y2 |
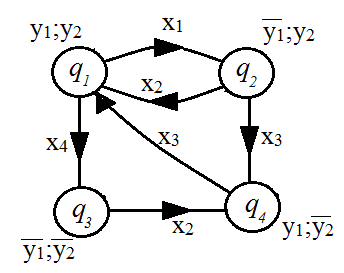
Граф переходов, у которого в каждой вершине явно указаны значения каждой выходной переменной называется графом переходов с явным заданием всех выходных переменных, иначе граф переходов неявно задан.
Преимущества графа с явным заданием выходных переменных: простота понимания и простота внесения изменений; Граф переходов с неявным заданием переменных плохо читаемы и более сложны для понимания, но при физической реализации более экономично используют память программы.