

ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ РФ
САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ ЭЛЕКТРОТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ ЛЭТИ

Факультет компьютерных технологий и информатики
Кафедра автоматики и процессов управления
Пояснительная записка к курсовому проекту
по дисциплине
локальные системы управления
электромашинная следящая система воспроизведения угла (ЭСС)
Исполнители темы,
студенты группы 3322
(бригада № 6) В. В. Антонов
Р. А. Красовский
Руководитель темы,
д-р техн. наук, проф. ___________________ В. А. Терехов
подпись, дата
Санкт-Петербург 2006
Реферат
Отчет 24 с., 1 ч., 20 рис., 3 табл., 8 источников, без прил.
СЛЕДЯЩАЯ СИСТЕМА, ВОСПРОИЗВЕДЕНИЕ УГЛА, ЭЛЕКТРОМАШИННОЕ УСИЛЕНИЕ, ПОДЧИНЕННОЕ РЕГУЛИРОВАНИЕ.
Объектом исследования является электромашинная следящая система воспроизведения угла.
Цель работы – расчёт электромашинной следящей системы (ЭСС) воспроизведения угла в соответствии с заданными показателями качества, и ее компьютерное моделирование для оценки влияния на ЭСС нелинейностей, вариаций параметров объекта регулирования и возмущений внешней среды.
В процессе работы проводились теоретические расчеты ЭСС по методу эквивалентного гармонического воздействия, компьютерное моделирование объекта исследования в пакете программ MATLAB/Simulink, а также подбор компонентов для реализации исследуемой системы.
В результате работы была спроектирована электромашинная следящая система воспроизведения угла, соответствующая заданным показателям качества.
Содержание
ВВЕДЕНИЕ 4
1 описание сау 5
2 предварительный расчет САУ 8
2.1 Подбор компонентов для реализации САУ 8
2.2 Составление расчетной структурной схемы замкнутой САУ 9
2.3 Расчет параметров ПФ регуляторов замкнутой САУ 11
2.3.1 Расчет внутреннего контура замкнутой САУ 11
2.3.2 Расчет внешнего контура замкнутой САУ 14
2.4 Составление программной модели исследуемой системы 16
3 моделирование САУ 17
3.1 Исследование динамических свойств системы 17
3.2 Оценка чувствительности системы 19
3.3 Исследование системы при наличии возмущений 20
3.4 Исследование системы с учетом нелинейностей 21
ЗАКЛЮЧЕНИЕ 23
СПИСОК использованных источников 24
Введение
Целью курсового проектирования является расчёт электромашинной следящей системы (ЭСС) воспроизведения угла в соответствии с заданными показателями качества, и ее компьютерное моделирование для оценки влияния на ЭСС нелинейностей, вариаций параметров объекта регулирования и возмущений внешней среды.
Выполнение курсового проекта проходит в два этапа. Первый этап представляет собой предварительный расчет САУ и включает в себя:
определение показателей качества, которым должна соответствовать САУ;
подбор компонентов для реализации САУ;
составление расчетной структурной схемы объекта регулирования (ОР) по заданной в техническом задании функциональной схеме с включением в неё регулирующего органа (РО), датчика, измерительного преобразователя, модели возмущения и с учетом нелинейной статической характеристики одного из устройств системы;
предварительный расчет параметров ПФ изменяемой части САУ по заданным показателям качества.
На втором этапе выполняется компьютерное моделирование САУ:
исследуются ее динамические свойства при входных управляющих и возмущающих воздействиях;
оценивается влияние нелинейности одного из элементов САУ и малых изменений параметров этого элемента относительно расчетных значений на показатели качества системы;
В заключение проводится анализ результатов расчёта и моделирования.
1 Описание сау
Описание САУ приводится в соответствии с темой 6 из приложения [1].
Силовая ЭСС
воспроизведения угла поворота ![]() исполнительного
вала объекта в диапазоне мощностей
до 100 кВт строится по схеме "электромашинный
усилитель (ЭМУ) поперечного поля -
исполнительный двигатель (ИД)
постоянного тока". На функциональной
схеме ЭСС (см. рисунок 1.1) ЭМУ приводится
во вращение кинематически связанным
с ним приводным двигателем (ПД).
исполнительного
вала объекта в диапазоне мощностей
до 100 кВт строится по схеме "электромашинный
усилитель (ЭМУ) поперечного поля -
исполнительный двигатель (ИД)
постоянного тока". На функциональной
схеме ЭСС (см. рисунок 1.1) ЭМУ приводится
во вращение кинематически связанным
с ним приводным двигателем (ПД).
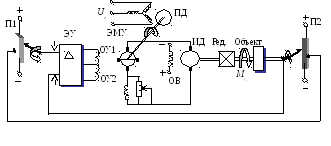
Рисунок 1.1 – Функциональная схема ЭСС
Обмотки управления
ОУ1, ОУ2 ЭМУ питаются от электронного
усилителя (ЭУ). ЭМУ является усилителем
мощности и питает обмотку якоря
(ИД), который через редуктор перемещает
на угол ![]() исполнительный вал объекта (антенна,
подвижная платформа и т.п.). С этим
же валом кинематически связан движок
потенциометра П2, выполняющего роль
датчика углового перемещения. На вход
ЭУ поступает напряжение
исполнительный вал объекта (антенна,
подвижная платформа и т.п.). С этим
же валом кинематически связан движок
потенциометра П2, выполняющего роль
датчика углового перемещения. На вход
ЭУ поступает напряжение![]() ,
пропорциональное ошибке воспроизведения
заданного угла
,
пропорциональное ошибке воспроизведения
заданного угла![]() :
:![]() гдеkкоэффициент пропорциональности.
Исполнительный двигатель поворачивает
движок потенциометра П2 до тех пор,
пока напряжение
гдеkкоэффициент пропорциональности.
Исполнительный двигатель поворачивает
движок потенциометра П2 до тех пор,
пока напряжение![]() не
станет равным нулю, т.е. когда
не
станет равным нулю, т.е. когда![]() .
ИД с редуктором развивает момент сил
.
ИД с редуктором развивает момент сил![]() ,
достаточный для преодоления момента
нагрузки
,
достаточный для преодоления момента
нагрузки![]() ,
создаваемого объектом. Очевидно, что
,
создаваемого объектом. Очевидно, что![]()
![]() .
.
Цель расчета – выбор коэффициента усиления ЭУ, обеспечивающего для заданной структуры и параметров передаточных функций (ПФ) устройств ЭСС работу системы с заданными показателями качества.
Исходные данные для расчета ЭСС представлены в таблице 1.1.
Таблица 1.1
-
Элементы ЭСС
Передаточные функции (ПФ) элементов ЭСС
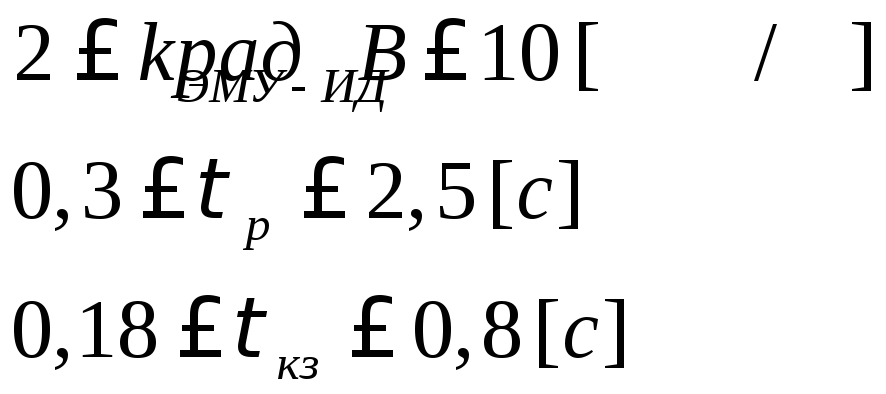
Диапазоны для выбора значений параметров ПФ
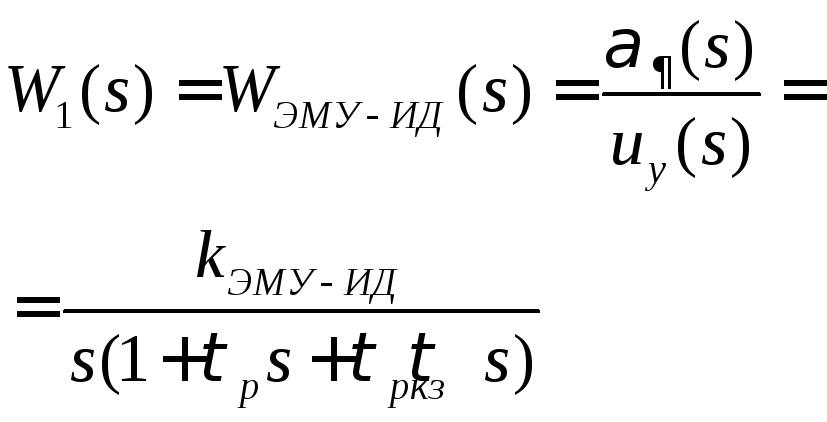
Соединение ЭМУ-ИД
Редуктор
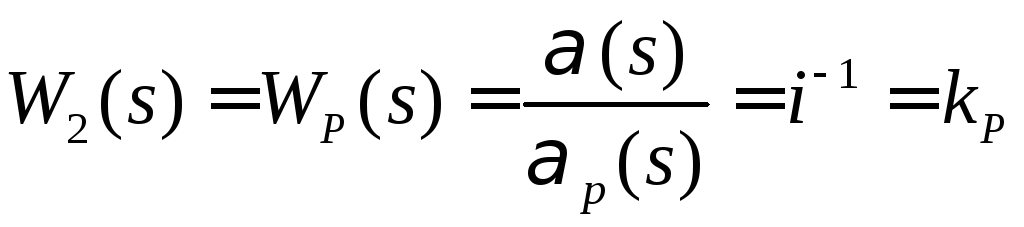
(
 )
)Электронный
усилитель (ЭУ)
Модель возмущения
Примечание – в таблице 1.1 приняты следующие обозначения:
 –изменение
угла поворота вала ИД;
–изменение
угла поворота вала ИД; –изменение
напряжения управления ЭМУ;
–изменение
напряжения управления ЭМУ; –постоянная
времени нарастания тока в короткозамкнутой
обмотке ЭМУ;
–постоянная
времени нарастания тока в короткозамкнутой
обмотке ЭМУ;  –постоянная времени
разгона ИД;
–постоянная времени
разгона ИД; –коэффициент
усиления соединения ЭМУ-ИД;
–коэффициент
усиления соединения ЭМУ-ИД;  –коэффициент
усиления редуктора;
–коэффициент
усиления редуктора; i– коэффициент редукции (i >>1);
 –постоянная времени
фильтра на входе ЭУ.
–постоянная времени
фильтра на входе ЭУ. –постоянная времени
якорной цепи ИД;
–постоянная времени
якорной цепи ИД;  –электромеханическая
постоянная времени ИД, величина которой
пропорциональна моменту инерции
на валу двигателя с учетом моментов
инерции двигателя и нагрузки с редуктором.
–электромеханическая
постоянная времени ИД, величина которой
пропорциональна моменту инерции
на валу двигателя с учетом моментов
инерции двигателя и нагрузки с редуктором.
При расчете и
моделировании СС примем изменение ![]() от 0
(отсутствие нагрузки) до 1 (номинальная
нагрузка), т.е. возмущение
от 0
(отсутствие нагрузки) до 1 (номинальная
нагрузка), т.е. возмущение![]() соответствует единичной ступенчатой
функции.
соответствует единичной ступенчатой
функции.
При моделировании
ЛСУ с учетом нелинейности одного из ее
устройств примем статическую характеристику
НЭ в виде характеристики усилителя с
зоной нечувствительности ![]() ,
насыщением
,
насыщением![]() и коэффициентом усиления в зоне
линейностиk =
1. Значение
и коэффициентом усиления в зоне
линейностиk =
1. Значение![]()
![]() где
где![]() максимальное
значение сигнала на входе ЭМУ.
максимальное
значение сигнала на входе ЭМУ.
Дополнительные данные для дальнейших расчетов указаны в таблице 1.2.
Таблица 1.2
|
Параметр |
Величина |
|
Максимальная
ошибка
|
|
|
|
|
|
|
|
|
Максимальное
угловое перемещение,
|
|