

11. Регулювання швидкості обертання двигуна з послідовним збудженням. Швидкість обертання двигунів з послідовним і паралельним збудженнями визначають за формулою (9.14).
Швидкість обертання двигуна послідовного збудження можна регулювати трьома способами: змінами опору кола якоря; магнітного потоку Φ статора; напруги U, підведеної до двигуна.
Регулювання швидкості обертання двигуна зміною опору кола якоря. Регулювання двигуна таким способом аналогічне регулюванню двигуна з паралельним збудженням. Здійснюється таке регулювання реостатом Rn.
Регулювання швидкості обертання двигуна зміною магнітного потоку Ф. Магнітний потік в обмотці збудження двигуна змінюють шунтуючим реостатом Rш (рис. 9.4). Якщо двигун має сталий гальмівний момент, незалежний від швидкості обертання, то при вимкненому рубильнику P1 струм збудження дорівнюватиме струму якоря Iзб = Ія. При цьому обертальний електромагнітний момент визначиться за формулою Мем = СмІяФ а рівняння електричної рівноваги буде U = Е + ІяRя (пусковий реостат повністю виведений). Оскільки спад напруги IяRя уже малий, то, нехтуючи ним, матимемо U » Е == сenФ. Отже, при сталій напрузі U = const на затискачах двигуна швидкість обертання n і магнітний потік Ф залежать один від одного. Якщо до ввімкнено рубильник Р1 то струм в обмотці якоря збільшиться, внаслідок чого обертальний момент стане більшим, ніж гальмівний, і швидкість обертання двигуна збільшуватиметься.
Процес зміни швидкості обертання триватиме доти, поки обертальний момент знову не дорівнюватиме гальмівному і двигун не обертатиметься з новою постійною швидкістю n1 > n.
Такий спосіб регулювання найбільш економічний і дає можливість плавно регулювати швидкість обертання двигуна.
Напрям дії обертального моменту двигуна можна змінити напрямом струму якоря Iя, або зміною напряму струму збудження. Схему реверсування двигуна з паралельним збудженням показано на рис. 9.7. Напрям струму в обмотці збудження змінюють перемикачем П.
ХАРАКТЕРИСТИКИ ДВИГУНІВ ПОСТІЙНОГО СТРУМУ
Властивості всіх електричних двигунів і, зокрема, постійного струму визначають за сукупністю трьох видів характеристик: пускових, робочих і регулювальних.
Пускові характеристики визначають властивості двигуна від моменту пуску до переходу його до усталеного режиму роботи. До цих характеристик належать пусковий струм Іп, пусковий момент Мп, час пуску і т. ін.
Робочі характеристики визначають властивості двигуна при усталеному режимі роботи. До них належать залежності n, М. Iя і η =f(P·2)при U = Unom= const. До робочих характеристик належить і механічна характеристика двигуна n = f (М) при U = const і Iзб = const.
Регулювальні характеристики визначають властивості двигунів при регулюванні швидкості їх обертання. До них належать: межі й характер регулювань (плавний чи ступінчастий), а також простота і надійність регулюючої апаратури.
Розглянемо робочі характеристики двигунів з паралельним і послідовним збудженням.
І. Робочі характеристики двигунів з паралельним збудженням. Робочі характеристики двигунів з паралельним збудженням показано на рис. 9.8, а. Вони є виразом залежності швидкості обертання n, струму якоря Iя, електромагнітного моменту Μ і к.к.д. η від корисної потужності P2 на валу двигуна при сталій номінальній напрузі Unom на його затискачах і сталому струмі збудження Iзб, тобто n, Iя, Μ і η = f(Р2) при U = const і Ізб = const.
Швидкісна характеристика n =f(P2). При номінальній напрузі і відсутності навантаження (холостий хід) струм якоря буде незначним .
Збільшення навантаження на валу двигуна є збільшенням гальмівного моменту. При цьому оберти двигуна і проти-е.р.с. повільно зменшуються (рис. 9.8, а. Із зменшенням проти-е.р.с. струм якоря збільшиться, а це зумовить збільшення обертального моменту двигуна, оскільки він пропорційний струму.
Обертальниі. момент збільшуватиметься доти, поки не зрівняється з гальмівним моментом. При цьому встановлюється нова постійна швидкість обертання, яка відповідає новому навантаженню двигуна. У цьому полягає принцип саморегулювання двигунів. Зменшення швидкості обертання при навантаженні двнгміа становить всього 5 – 10% номінальних обертів. Це пояснюється тим, що магнітний потік, створений струмом обмотки збудження, при всіх навантаженнях залишається сталим Φ — Ізб = const, а результуючий магнітний потік із збільшенням навантаження трохи зменшується завдяки реакції якоря, що веде до збереження швидкості двигуна.
Залежність моменту і струму якоря від навантаження: Μ і Ія = f(Р2). При сталих обертах n = const корисний обертальний
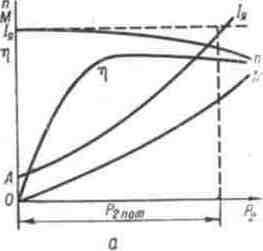
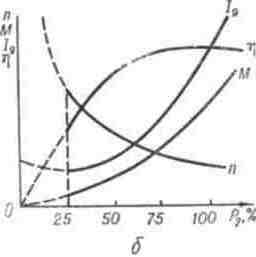
Рис. 3.8. Робочі характеристики:
(А - двигуна з паралельним збудженням; б—двигуна з послідовним збудженням.)
момент буде пропорційний корисній потужності й крива Μ = f(Р2) перетвориться в пряму. Із збільшенням навантаження швидкість обертання n зменшується, отже, щоб потужність Р2 була так само корисною, обертальному моменту Μ треба мати більше значення, ніж при n = const. Тому крива Μ = f(P2) із збільшенням навантаження відхиляється в бік більших значень.
Згідно з формулою (9.5) при Φ = const струму якоря Ія треба б змінюватися прямо пропорційно моменту, але потік Φ при збільшенні навантаження трохи зменшується внаслідок розмагнічуючої дії реакції якоря. Отже, для створення того самого моменту струму якоря Ія треба мати більше значення, ніж при Φ = const. Тому крива Ія = f(P2) більше вигнута, ніж крива Μ = f(Р2).
Залежність к. к. д. двигуна від Р2. К. к. д. двигуна визначається за
ή =
![]() Р2
/ Р2
+ ΣР
Р2
/ Р2
+ ΣР
де ΣР = Рм + Рст + Рмех — загальні втрати в двигуні.
При холостому ході Р2 = 0, η = 0.
При невеликому, зле зростаючому навантаженні сумарні втрати (в основному втрати на тертя) залишаються практично сталими.
К. к. д. при цьому зростає, бо чисельник рівняння зростає швидше, ніж знаменник. При значному навантаженні дуже зростають втрати в обмотці якоря, тому що вони пропорціііні квадрату струму. При навантаженні 0,7—0,8% від номінального к. к. д. двигуна починає зменшуватися.
Механічна характеристика двигуна з паралельним збудженням є залежністю n = f (М) при U = const, Iзб = const і Rрег = 0. Враховуючи (9.5) і (9.14) і зробивши невеликі перетворення, матимемо рівняння залежності швидкості обертання від моменту
n = c1 – c2M
На рис. 9.9, α показано механічну характеристику двигуна паралельного збудження (при цьому нехтують реакцією якоря).
Властивість двигуна з паралельним збудженням зберігати майже незмінною швидкість обертання при значних змінах навантаження широко використовують на практиці.