

92. Способи збудження і пуск двигунів постійного струму
Двигуни постійного струму, як і генератори, бувають з незалежним, паралельним, послідовним і мішаним збудженнями. Незалежне збудження (рис. 9.2) застосовують тоді, коли напруги збудження і якоря відмінні.
У двигунах з паралельним збудженням (рис. 9.3) напруга мережі однакова для якоря і обмотки збудження. Номінальний струм двигуна Іnorn дорівнює сумі струмів у якорі та обмотці збудження:
Іnom = Ія + Ізб- (9.8)
Двигуни з послідовним збудженням (рис. 9.4) мають обмотку збудження, яка послідовно приєднана до обмотки якоря, тому струм Ія = Ізб.
Електромагнітний момент для цього двигуна пропорційний квадрату струму
Мем = СмФІ (9.9)
тому що основний потік для ненасиченої машини пропорційний струму
Φ = kl.
Двигуни з мішаним збудженням (рис. 9.5) мають дві обмотки збудження, одну з яких увімкнено паралельно якорю, а другу — послідовно з ним. Послідовна обмотка збудження має небагато витків і може вмикатись узгоджено або зустрічне. У першому разі її електромагнітне поле підсилюватиме поле основної паралельної обмотки, а в другому —послаблюватиме.
Пускають двигун постійного струму з допомогою пускового реостата. Це пояснюється тим, що в момент пуску проти-е.р.с. дорівнює нулю (Е = 0), тому струм у якорі буде в 8—10 раз більший, ніж номінальний. Опір обмотки якоря малий (десяті або навіть соті частки ома).
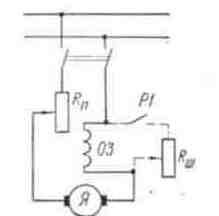
Рис. 9.4. Електрична схема двигуна постійного струму з послідовним збудженням.
Рнс. 9.5. Електрична схема двигуна постійного струму з мішаним збудженням.
За формулою (9.1) струм якоря Iя
=
![]() .
При пуску n
= О, тому
.
При пуску n
= О, тому
E = knФ = 0, тоді
Ія
=
![]()
![]() (8 — 10) Inom.
(8 — 10) Inom.
Для обмеження пускового струму послідовно з якорем вмикають пусковий реостат Rп, який у міру розгону двигуна поступово повністю виводиться. Пусковиі'і струм визначають за формулою
I =
![]() (1,5 - 2,0)Inom
(1,5 - 2,0)Inom
де Rn — пусковий опір.
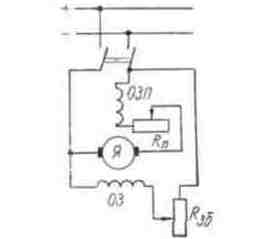
Щоб мати потрібний пусковий момент, опір пускового реостата вибирають таким, щоб пусковий струм був більший від номінального в 1,5—2,0 раза. Крім того, для збільшення пускового моменту і полегшення пуску паралельну обмотку збудження вмикають на повну напругу мережі, для чого регулювальний реостат у колі паралельного збудження виводять повністю. Процес пуску двигуна з триступеневим пусковим реостатом показано на рис. 9.3, б. Під дією пускового обертального моменту Μ СмФІя ротор двигуна почне обертатись і в якорі виникне протн-е.р.с. Тоді струм якоря визначають з формули електричної рівноваги U = Е + Ія(Ря + Rn)·
При такому струмі якоря оберти двигуна збільшуватимуться доти, поки не зрівняються обертальний і гальмівний моменти (точка 1). Потім виводять черговий ступінь пускового реостата, і струм якоря збільшується (точка 2), а отже, збільшуються момент і кількість обертів (точка 2'). Так, поступово виводячи пусковий реостат, доводять оберти двигуна до номінальних (точка 3'). Струм в якорі при цьому дорівнюватиме
Iя =
РЕГУЛЮВАННЯ ШВИДКОСТІ ОБЕРТАННЯ ТА РЕВЕРСУВАННЯ ДВИГУНІВ ПОСТІЙНОГО СТРУМУ
І. Регулювання швидкості обертання двигунів з паралельним збудженням. Якщо в коло якоря ввімкнено регулювальний реостат Rp то швидкість обертання двигуна з паралельним збудженням визначають за формулою
n =
![]()
З формули видно, що швидкість обертання двигуна можна регулювати трьома способами: змінами опору кола якоря; магнітного потоку Φ (струму збудження); напруги U, підведеної до двигуна.
Регулювання швидкості обертання двигуна зміною опору кола якоря. Схему регулювання швидкості обертання двигуна показано на рис. 9.3, α, де пусковий реостат Rn виконує функцію регулювального реостата. Обмотку збудження вмикають на повну напругу мережі, внаслідок чого утворюється сталий магнітний потік Ф. Припустимо, що гальмівний момент на валу двигуна залишається сталим і не залежить від швидкості обертання. Якщо при цій умові зменшити опір регулювального реостата, то в перший момент швидкість обертання n внаслідок інерції не встигне змінитися. У зв'язку з цим не зміниться і проти-е.р.с., оскільки Е = сenФ. Тоді струм якоря, що визначають за формулою (9.12), збільшується обернено пропорційно опору (Rя + Rр). Внаслідок цього порушується рівновага між обертальним і гальмівним моментами (обертальний момент стає більшим за гальмівний момент). Швидкість обертання двигуна і його проти-е.р.с. збільшуватимуться, а струм якоря Iя зменшуватиметься доти, поки не досягне свого попереднього значення. Обертальний момент при цьому дорівнюватиме гальмівному моменту при новій більшій швидкості обертання. Якщо при сталих опорах у колі якоря збільшувати гальмівний момент, то швидкість обертання двигуна спадатиме. Цей спосіб дає можливість регулювати швидкість обертання двигуна в досить широких межах, але він невигідний через великі втрати в реостаті й зменшення к.к.д.
Якщо паралельно працюють кілька двигунів, наприклад, у трамваях, то швидкість їх обертання регулюють одночасно реостатом і зміною електричної схеми з'єднання двигунів. Замінюючи послідовне з'єднання мішаним і потім паралельним, збільшують оберти двигунів. Усі перемикання виконують з допомогою спеціального перемикача — контролера.
Регулювання швидкості обертання двигуна зміною магнітного потоку. Припустимо, що гальмівний момент двигуна і напруга залишаються сталими і не залежать від швидкості обертання двигуна. Якщо зменшити опір у колі збудження, то струм збудження і магнітний потік Ф також збільшаться (рис. 9.6). У перший момент швидкість обертання n; внаслідок інерції не зміниться. З рівняння
U = Е + IяRя = сenФ + ІяRя =const
видно, що збільшення магнітного потоку Ф спричинить зменшення струму в якорі. Оскільки проти-е.р.с. Е набагато більша від спаду напруги IяRя
у колі якоря, то навіть при невеликому збільшенні магнітного потоку Ф струм в якорі різко зменшується. Внаслідок Цього обертальний момент стає меншим, ніж гальмівний, і швидкість двигуна та проти-е.р.с. зменшуватимуться, а
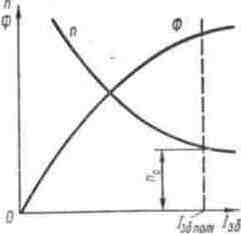
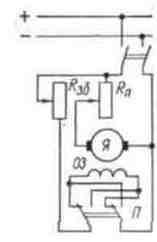
Рис. 9.7. Схема реверсування двигуна постійного струму і паралельним збудженням.
струм якоря почне збільшуватися доти, поки не поновиться рівновага між моментами. При цьому способі регулювання швидкості к. к. д. двигуна майже не змінюється.
При холостому ході криву n = f(Iзб) при U = const називають характеристикою холостого ходу двигуна. При великих значеннях струму збудження (рис. 9.6) крива n == f(Iзб) зменшується набагато (впливає насичення індуктора) і далі йде майже паралельно осі абсцис.
При певному навантаженні двигуна і сталій напрузі крива буде подібною, але розмішується трохи нижче.
Регулювання швидкості обертання зміною підведеної до двигуна напруги.
Напругу на затискачах двигуна регулюють зміною напруги генератора, що живить двигун. У Цьому разі обмотка збудження двигуна живиться від окремого джерела (незалежне збудження).