

3. 2. 2. 1. Лувс profibus
Рис. 3.7
Рис. 3.8
Рис.
3.9


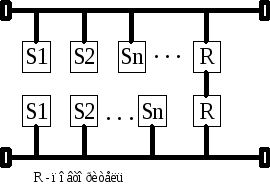
Топология этой сети - шинная. Однако, используя повторители, эту сеть можно разбить на сегменты и даже построить с ее использованием сеть, имеющую топологию дерева сегментов (рис. 3.9).
3. 2. 2. 2. Лувс caNbus
Рис. 3.10

В отличие от типовых сетевых интерфейсов, например, Ethernet, Arcnet и т.д., интерфейс CAN обеспечивает гибкую возможность задания приоритета на шине, и, фактически, является вариантом микропроцессорного шинного интерфейса с дифференциальными приемниками и передатчиками со скоростью передачи до 1 Мбит/сек и возможностью одновременного подключения до 256 устройств на максимальном расстоянии до 1000 метров. Шина CAN особенно удобна для соединения интеллектуальных устройств ввода-вывода, а также датчиков и исполнительных механизмов на технических объектах, на технологических линиях или на предприятии в целом.
Главные особенности интерфейса CAN:
высокая помехозащищенность(подавление синфазных помех) за счет использования дифференциальных приемопередатчиков. Устройства присоединяются к шине, состоящей из 3-х проводов: два сигнальных и один общий.
надежная система выявления и коррекции ошибок при передаче данных за счет формирования в каждом сообщении контрольной суммы (2 байта). В случае возникновения сбоя при передаче приемник передает код ошибки, на основании которого передатчик автоматически реинициализирует передачу сообщения. Подобный цикл продолжается до тех пор, пока не будет получено подтверждение правильной передачи данных.
возможность программирования частоты и фазы передаваемого сигнала, которая задается, исходя из характеристик канала; контроль за нарушением определенных фиксированных полей передаваемого сигнала.
гибкая система задания приоритетов в канале при одновременной работе группы передатчиков, определяется адресным маркером (может состоять из 11 или 29 бит). Этот маркер также определяет адрес сообщения. В момент начала передачи контроллер CAN прослушивает линию и, в случае если шина запрашивается устройством с более высоким приоритетом, освобождает шину на время, необходимое этому устройству, затем возобновляя передачу информации. CAN контроллер позволяет в процессе работы изменять приоритет передаваемых сообщений. Например, во время аварии устройство может задать наивысший приоритет своему сообщению, обеспечивая максимальную скорость реакции системы на данное событие.
низкая стоимость. Используется один кабель связи, т. к. не требуется соединять каждое устройство с основной кассетой контроллера. Это значительно уменьшает количество проводов и объем работ по соединению локальных станций, а тем самым - ошибки и стоимость соединений.
Благодаря высокой надежности и простоте использования интерфейс CAN нашел широкое распространение в системах управления реального времени: автомобильных, корабельных, железнодорожных бортовых системах, в системах управления станками, роботами, в гибких автоматизированных линиях, в энергетических объектах и т.д. Применение стандартизированных протоколов верхнего уровня позволяет строить системы управления с автоконфигурацией. Подобный подход позволяет экономить время (до нескольких десятков раз) при разработке и производстве больших систем управления.
CANbus может использоваться совместно с B&R SYSTEM 2003, B&R SYSTEM 2005, B&R SYSTEM 2010, PROVIT 2000/4000, PANELWARE C220.