

3.5 Выбор датчиков.
Для разрабатываемой системы позиционирования необходимы такие датчики как: датчики тока, датчик скорости (необходим для реализации векторного управления ), датчик линейного перемещения.
В качестве датчика скорости применим энкодер 1XP8001-1 фирмы Siemens. Точность измерения углового перемещения необходима для оргнизации векторного управления[10, encoderconnection.com/siemens-1xp8001-1]
Таблица 3.5.1—Технические данные энкодера 1XP8001-1 фирмы Siemens
Напряжение питания |
1XP8001-1 (версия HTL) +10В до +30В |
Входной ток без нагрузки |
200 мА |
Максимальный нагрузочный ток |
Макс. 100 мА |
Точность (импульсов/оборот) |
1024 |
Пульсация смещения между двумя выходами |
90 Гр ± 20% |
Выходная амплитуда U |
Uвыс > Uв-3.5В Uниз< 3В |
Частотный диапазон |
0.8 мс до 160 кГц |
Максимальная скорость |
9000 об/мин |
Температура хранения |
-20 Гр С до 80Гр С |
Защитное исполнение |
IP66 |
Максимальная радиальная консольная нагрузка |
60N |
Максимальная радиальная аксиальная нагрузка |
40N |
В качестве датчика тока выбираем датчик на основе элемента Холла компании LEM [11]. Выбор производим по максимальному току двигателя. Максимальный ток двигателя Imax=Iном*λI =26.8*6,6=176,88 А.
Таким образом, выберем датчик тока АРR 100 В10 со следующими номинальными электрическими параметрами:
Номинальный входной ток, эфф.знач. 100 A
Диапазон преобразования 0 .. ± 300 A
Номинальное аналоговое выходное напряжение ±10 В
Напряжение питания (± 5 %) ± 12 .. ±15 В
Частотный диапазон (- 3 dB) AC 30.. 6000 Гц
3.6 Выбор задающего устройства.
Так как в системе используется комбинированный регулятор положения, то из-за его сложности целесообразно программная реализация данного регулятора. За основу возьмем микроконтроллер (МК) на один из входов которого будет подаваться цифровой сигнал с датчика линейного перемещения рабочего органа, после реализации алгоритма в МК через другой порт инициализированный как выход будет выдаваться задающий сигнал. На выходе второго порта необходимо установить ЦАП для согласования с аналоговой частью системы. В качестве необходимого МК выбираем 32-разрядный ADSP-BF531. Его разрядность количество портов подходит для реализации комбинированного регулятора.
3.7 Реализация управляющего устройства
Так как была выбрана аналоговая схемная реализация САУ, то необходимо выполнить выбор необходимых операционных усилителей, логических элементов и пассивных элементов электрических цепей.
Регуляторы тока выбираем на основе операционного усилителя марки MC1741CG. Операционный усилитель MC1741CG является ОУ общего назначения, обладающий минимальным шумовым сигналом по входу. Коэффициент усиления ОУ не изменяется с изменением напряжения питания. Балансировка выходного напряжения осуществляется внешним потенциометром Rб. Технические данные операционного усилителя сведем в таблицу 3.7.1:
Таблица 3.7.1— Технические данные ОУ
|
На основании рассчитанных передаточных функций динамических звеньев выполним выбор R-C цепей операционных усилителей.
ПИ-регулятор тока получаем в виде:

Принимаем конденсатор
 ,
тогда из соотношения
,
тогда из соотношения
 получаем:
получаем:
Выбираем резистор
 .
Из соотношения
.
Из соотношения
 находим
значение сопротивления R4
находим
значение сопротивления R4
Выбираем резистор R4= 4300 Ом

Выбираем элементы.
Резисторы:
R3:
СП5-16В – 0,125 – 4,7 кОм
 5%
5%
R4: СП5-16В – 0,125 – 4,3 кОм 5%
R5: МЛТ – 0,125 – 3 кОм 5%
Конденсатор:
C1: K50 – 6 – 3,3 мкФ, 10 В
В качестве регулятора скорости принимаем П-регулятор.


Задаёмся значением
 ,
тогда
,
тогда

Принимаем:
R7: МЛТ – 0,125 – 1 кОм 5%
R6: СП5-16В – 0,125 – 1,5 Ом 5%
R5: СП5-16В – 0,125 – 27 Ом 5%
ПИ регулятор потокосцепления ротора выбираем из соотношения:
 (3.7.3)
(3.7.3)
Принимаем
 ,
тогда
,
тогда

Выбираем резистор
 .
.


Принимаем:
R8: МЛТ – 0,125 – 150 кОм 5%
R9: СП5-16В – 0,125 – 270 Ом 5%
R7: СП5-16В – 0,125 – 33 Ом 5%
C2: K50 – 6 – 3,3 мкФ, 10 В
Для подключения МК выбираем элементы для поверхностного монтажа:
Резисторы
0402 – 0,125 – 10 Ом 5%
Конденсаторы фирмы Kernel:
X7R-0.1 мкФ 10В
X7R-0.01 мкФ 10В
Система уравнений на которых построена работа комбинированного регулятора рассмотрена в главе 3.4.
Для 32 разрядного выхода МК выбираем 4 16-разрядных ЦАП типа AD9148 [12].
Для подключения ЦАП выбираем элементы для поверхностного монтажа:
Конденсаторы фирмы Kernel:
X7R-10 мкФ 10В
X7R-100 нФ 10В
Сопротивления обратных связей регуляторов рассчитываются на максимально допустимый входной ток операционного усилителя.
Ограничение выходов регуляторов основано на охвате регуляторов нелинейной обратной связью.
В качестве диодов выберем диодный мост типа B10S [13]
Максимальное обратное напряжение 120 В
Максимально обратный ток 5 мкА
Максимальный прямой ток 0,5А
Максимальное прямое напряжение 1,1 В
Резистор выберем типа TR10F2207Gk -1-2.2 ГОм 2%
с подстроечным резистором SH-R114S-600 Мом 2%
Блок деления реализуем с помощью AD632[12].
3.8 Функциональная схема СУЭП
Функциональная схема СУЭП представлена на рис 3.8.1. Следует отметить, что при использовании энкодера на МК будет поступать цифровой сигнал. На МК необходимо программно реализовать вычисление углового перемещения ротора двигателя, но организовать вычисление скорости на том же МК не удастся т.к. не хватит его вычислительных возможностей . Решением данной проблемы может стать использование второго МК того же типа, с подключением по принципу Master-Slave.
Так как и для первого МК, для второго необходимо использование ЦАП для согласования с остальной частью системы.
Для данных целей возьмем 4 восьмиканальных ЦАП AD9148.
Для подачи питания для всех аналоговых регуляторов используем источник питания фирмы Aimtec типа AMEL15-MAZ [14]
Входное напряжение 90-260 В
Выходное напряжение :3,3;5 ;12 ;15;24;±5; ±12 ; ±15
Количество выходов 2
Для подачи питания на ЦАП и МК также возьмем источник питания фирмы Aimtec типа AMEL15-MAZ [14].
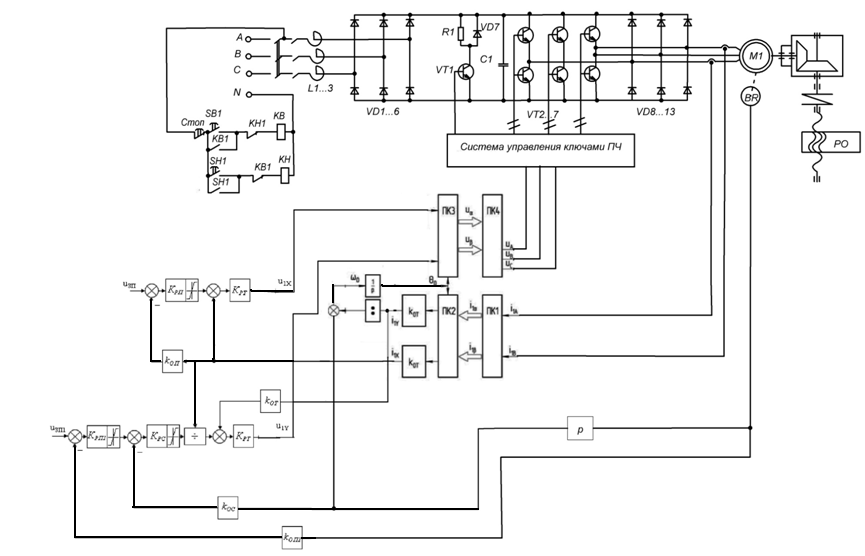
Рис.3.8.1 — Функциональная схема системы управления электроприводом