

Введение
Системы регулирования положения представляют собой класс систем с чрезвычайно широким диапазоном назначений. Они находят применение в различных промышленных установках и роботах в качестве систем наведения антенн, оптических телескопов, для стабилизации различных платформ в условиях качки оснований, на которых монтируются эти платформы, и т.д. Мощность исполнительных двигателей составляет от единиц и десятков ватт до десятков и сотен киловатт, их питание осуществляется от тиристорных преобразователей или транзисторных усилителей мощности.
Контроль положения осуществляется с помощью датчиков, которые в аналоговой или дискретной форме дают информацию о перемещении рабочего органа механизма на протяжении всего пути. В качестве датчиков используются сельсины, вращающиеся трансформаторы, импульсные и цифровые датчики.
Сейчас наиболее распространены два вида систем электропривода с НПЧ и преобразователем частоты с промежуточным звеном постоянного тока. Такая система состоит из преобразователя переменного тока промышленной частоты в постоянный, и автономного инвертора напряжения АИН либо АИТ, которые преобразуют напряжение постоянного тока в напряжение переменного тока требуемой частоты.
Заданием на данный курсовой проект является разработка системы автоматического управления положением электропривода.
1. Требования к системе управления электроприводом
1.1 Технические данные электродвигателя
В соответствии с заданием в проекте будет использоваться двигатель типа: 5А200L8.
Параметры асинхронного двигателя:
- номинальная мощность двигателя Рн =22 кВт;
- номинальное напряжение Uн=380 В;
- номинальное скольжение Sн=4 %;
- критическое скольжение Sн=13,5 %;
- номинальный КПД: н=90 %;
- синхронная частота вращения n=735 об/мин;
- номинальный коэффициент мощности cos н=0,8;
- кратность максимального момента: Мmax/Mн=2;
- кратность пускового момента: Мп/Мн=2,2;
- кратность минимального момента: Мmin/Мн=1,9;
- кратность пускового тока: Iп/Iн=6,6;
- момент инерции Jдв=0,35 кгм2;
высота оси вращения двигателя h=200 мм.
1.2 Требования к системе управления электроприводом.
В соответствии с заданием на курсовой проект необходимо разработать систему управления электроприводом со следующими требованиями и параметрами:
1. Тип двигателя - 5А200L8;
2. Обрабатываемые
перемещения:
 м
м
3. Допустимая
статическая ошибка:

Воспользуемся векторной системой управления.
Дополнительные требования к системе управления электроприводом:
наложение тормоза после останова;
удобство управления, диагностики и наладки;
минимальные габариты, масса и стоимость;
требования техники безопасности и охраны труда;
требования противопожарной безопасности;
защита от радиопомех и подавление собственных радиопомех;
энергетические показатели.
Обобщенная кинематическая схема электропривода представлена на рисунке 1.2.1:
Рисунок 1.2.1 – Кинематическая схема электропривода.
В электроприводе
используется АДКЗР типа 5А200L8.
Вал двигателя цилиндрический диаметром
450 мм. Максимальный момент  =576
Нм. Для соединения вала ЭД с валом
редуктора, а также для выполнения
торможения используем тормозную муфту
УВ3138
с максимальным крутящим моментом
=576
Нм. Для соединения вала ЭД с валом
редуктора, а также для выполнения
торможения используем тормозную муфту
УВ3138
с максимальным крутящим моментом


 .
.
Для соединения редуктора и передачи «винт-гайка» используем муфту типа BK-1500.
Таблица1.2.1—Характеристики муфты BK-1500 [www.rw-kupplungen.de ]
-
Максимальный крутящий момент
М,Нм
Момент инерции
J,

Масса
m,к
1500
0,0106
3,3
 (1.2.1)
(1.2.1)
Номинальный момент электродвигателя:
 (1.2.2)
(1.2.2)
Радиус приведения:
 (1.2.3)
(1.2.3)
Приведенный момент механизма:

где Fмех – механическая сила, Н;
Суммарный момент инерции системы:
 (1.2.4)
(1.2.4)
 (1.2.5)
(1.2.5)
Момент нагрузки, приведенный к валу двигателя:


Рассмотрим двухмассовую систему:


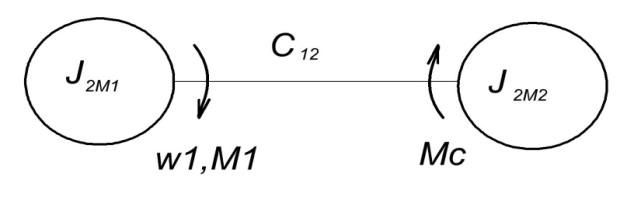
Рисунок1.2.2 — двухмассовая система ЭП
Для анализа ЭП необходимо перейти от двухмассовой системы к одномассовой.
От двухмассовой системы перейдем к одномассовой:


Рисунок 1.2.3— одномассовая система ЭП
Для построения системы управления электроприводом определим области изменения статического и динамического моментов.
Статический момент :

Рисунок 1.2.6—Область работы ЭП в статике.