

Министерство транспорта РФ
Департамент Морского флота
ГМА им. адм. С О Макарова
Кафедра Электродвижения и Автоматики судов.
Курсовая работа по основам судового электропривода на тему:
«Расчет электропривода мостового крана»
Вариант №15
Выполнил: курсант 331 группы
Лабецкий И.Ю.
Проверил: профессор
Ягодкин В.Я.
Санкт-Петербург
2012г
Задание:
Спроектировать электропривод мостового крана заданной грузоподъемности имеющего три механизма передвижения крана, тележки и подъемной лебедки.
Использовать для механизма передвижения крана (моста) электродвигатель постоянного тока независимого возбуждения, для тележки – асинхронный двигатель с фазным ротором.
Выбрать для механизма подъемной лебедки двигатель постоянного тока последовательного возбуждения.
Содержание курсовой работы:
Определить мощность, момент и частоту вращения электродвигателей механизмов передвижения и подъема груза. Выбрать двигатели по каталогу.
Для электродвигателей механизмов передвижения:
а) Рассчитать величину сопротивления пусковых и тормозных резисторов;
б) Построить естественные и искусственные механические характеристики
при работе двигателя с различными сопротивлениями ступеней пусковых
резисторов в цепи якоря ( ротора);
в) Построить механические характеристики в режиме динамического
торможения.
Электропривод подъемной лебедки должен обеспечить четыре ступени
регулирования скорости при работе на подъеме и четыре ступени при работе на спуск.
Рассчитать и построить механические характеристики и определить скорости подъема и спуска груза на всех ступенях работы двигателя.
Определить продолжительность переходных режимов и построить кривые изменения
 и
и
 для пуска и торможения электродвигателя
механизма передвижения крана.
для пуска и торможения электродвигателя
механизма передвижения крана.Для механизма передвижения крана построить нагрузочную диаграмму и проверить электродвигатель на нагрев.
Составить схемы управления двигателей передвижения крана и тележки. Выбрать по каталогам необходимую аппаратуру.
Для выполнения курсовой работы задаются следующие величины:
-
вес мостового крана (с тележкой)

-
вес тележки

-
вес груза (грузоподъемность)

-
вес грузозахватывающего устройства

-
скорость движения крана

-
скорость движения тележки

-
скорость подъема груза

-
радиус колеса крана и тележки

-
радиус шейки оси колеса

-
диаметр барабана подъемной лебедки

-
момент инерции барабана

-
номинальный КПД механизмов передвижения

-
номинальный КПД механизма подъема

-
передаточное отношение редуктора
передвижения крана

-
передаточное отношение редуктора
передвижения тележки

-
передаточное отношение редуктора
грузоподъемной лебедки

-
передаточное отношение полиспата

-
путь, проходимый краном

-
путь, проходимый тележкой

-
высота подъема (спуска) груза

-
время стоянки крана при разгрузке

-
время стоянки крана при погрузке

I, Определение мощности и выбор электродвигателя
1. Механизм передвижения: Мощность электродвигателя передвижения моста и тележки определяется по нагрузке в статическом режиме работы.
Для этого необходимо определить мощность и приведенный к валу статический момент.

Где
 -
коэффициент трения в опорах ходовых
колес;
-
коэффициент трения в опорах ходовых
колес;
 -
коэффициент трения качения ходовых
колес;
-
коэффициент трения качения ходовых
колес;
 -
коэффициент, учитывающий трение колес
о рельсы возникающее вследствие
возможного перекоса конструкции моста
или тележки. (Данные коэффициенты берутся
из таблиц №1,2,3 в методичке соответственно)
-
коэффициент, учитывающий трение колес
о рельсы возникающее вследствие
возможного перекоса конструкции моста
или тележки. (Данные коэффициенты берутся
из таблиц №1,2,3 в методичке соответственно)
Для мостового крана:

С
учетом коэффициента запаса
 имеем
имеем

Угловая скорость двигателя:

Частота вращения:

По расчетам мощности и частоты вращения выбираем по каталогу с ПВ = 25% двигатель постоянного тока независимого возбуждения Д32 (независимое возбуждение) со следующими параметрами:

Пересчитываем передаточное отношение редуктора механизма передвижения:
Определяем приведенный к валу момент сопротивления:

2. Механизм передвижения тележки:

Где
- коэффициент трения в опорах ходовых колес;
- коэффициент трения качения ходовых колес;
- коэффициент, учитывающий трение колес о рельсы возникающее вследствие возможного перекоса конструкции моста или тележки. (Данные коэффициенты берутся из таблиц №1,2,3 в методичке соответственно)



Выбираем асинхронный двигатель с фазным ротором МТМ112-6



Определяем
новые


3. Грузоподъемный механизм:

Угловая
скорость двигателя:

Частота
вращения:



Выбираем двигатель постоянного тока последовательного возбуждения Д814 ПВ=25%:

Пересчитываем


II. Расчет пусковых, тормозных, регулировочных резисторов и построение механических характеристик.
1. Двигатель независимого возбуждения.
а) Пусковые резисторы:
 ,
,
 и
и
 ,
,
 (координаты
двух точек, необходимых для построения
ЕМХ - график-прямая)
(координаты
двух точек, необходимых для построения
ЕМХ - график-прямая)

Где
 (если в каталоге
не указано сопротивление якоря, то его
ориентировочно определяют, приняв, что
половина всех потерь в двигателе при
номинальной нагрузке связана с потерями
в меди якоря)
(если в каталоге
не указано сопротивление якоря, то его
ориентировочно определяют, приняв, что
половина всех потерь в двигателе при
номинальной нагрузке связана с потерями
в меди якоря)
При
 ;
;



Рассчитаем сопротивление пускового реостата. Для этого задаемся величиной максимального пускового момента:

и величиной момента переключения

где
 - сопротивление всех ступеней реостата;
- сопротивление всех ступеней реостата;

Число ступеней реостата:

Величины
сопротивлений ступеней пускового
реостата определяются из пусковой
диаграммы :




Проверка Rp=Rp1+Rp2+Rp3+Rp4=3,87 Ом
Установившаяся скорость будет: ωс=105 рад/сек
Установившийся момент на валу двигателя будет: Мс=40,62 Н*м
б) Тормозные резисторы:
При динамическом торможении
Считаем
что
 ,
,




При торможении противовключением

или

Пусковая диаграмма двигателя независимого возбуждения (см. рис.№1).
Мтд, Н*м |
0 |
208,2 |
w, рад/с |
0 |
83,8 |
2. Асинхронный двигатель с фазным ротором.
а)
Расчет
ЕМХ:




Максимальный критический момент:


Таблица 1 (EMХ см.рис.№2)
Мн=Ме, Н*м |
0 |
32,85 |
56,68 |
85,95 |
100,19 |
106,21 |
107,70 |
106,70 |
104,35 |
78,33 |
Se |
0 |
0,02 |
0,04 |
0,08 |
0,12 |
0,16 |
0,20 |
0,24 |
0,28 |
0,60 |
Sи1 |
0 |
0,28 |
0,57 |
1,14 |
1,70 |
2,27 |
2,84 |
3,41 |
3,97 |
8,52 |
Sи2 |
0 |
0,12 |
0,23 |
0,47 |
0,70 |
0,94 |
1,17 |
1,41 |
1,64 |
3,52 |
Sи3 |
0 |
0,05 |
0,10 |
0,19 |
0,29 |
0,38 |
0,48 |
0,57 |
0,67 |
1,44 |
б) Динамическое торможение.
При динамическом торможении двигатель отключается от сети и его статорная обмотка подключается к источнику постоянного тока. Для анализа динамического торможения используем схему замещения АД:

 -номинальное
фазное напряжение двигателя;
-номинальное
фазное напряжение двигателя;
 ;
;

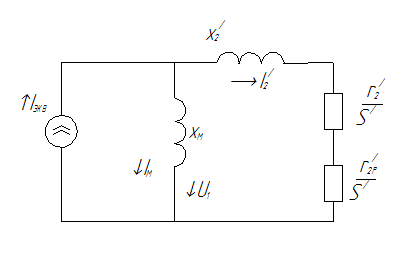 рис.4
Схема замещения при динамическом
торможении
рис.4
Схема замещения при динамическом
торможении
Скольжение в режиме динамического торможения


 ;
;


При Iэкв и r2∑ ,задаваясь Iµ. можно найти по кривым (см. рис.6 методички) значения Iµ и xµ . Находится s', далее– ток I2' и момент М'. Расчет механической характеристики ведется при Iэкв=3I0 и r2p=0.2rpн*.
Таблица 3
I'2, А |
2,83 |
6,31 |
8,85 |
10,73 |
12,27 |
14,73 |
16,64 |
18,15 |
19,37 |
20,24 |
20,87 |
21,25 |
21,36 |
M', Н∙м |
-12 |
-28 |
-40 |
-48 |
-56 |
-68 |
-79 |
-87 |
-96 |
-88 |
-72 |
-42 |
-22 |
S, |
0,98 |
0,96 |
0,94 |
0,93 |
0,92 |
0,90 |
0,89 |
0,89 |
0,88 |
0,86 |
0,82 |
0,68 |
0,37 |
S' |
0,02 |
0,04 |
0,06 |
0,07 |
0,08 |
0,10 |
0,11 |
0,11 |
0,12 |
0,14 |
0,18 |
0,32 |
0,63 |
I |
21,53 |
20,66 |
19,58 |
18,49 |
17,40 |
15,23 |
13,05 |
10,88 |
8,70 |
6,53 |
4,35 |
2,18 |
1,09 |
X |
6,89 |
7,56 |
8,00 |
8,45 |
9,11 |
10,67 |
12,67 |
15,34 |
20,01 |
23,34 |
27,79 |
32,23 |
34,46 |
I' |
2,18 |
2,09 |
1,98 |
1,87 |
1,76 |
1,54 |
1,32 |
1,10 |
0,88 |
0,66 |
0,44 |
0,22 |
0,11 |
X' |
0,31 |
0,34 |
0,36 |
0,38 |
0,41 |
0,48 |
0,57 |
0,69 |
0,90 |
1,05 |
1,25 |
1,45 |
1,55 |