

6. Магнитоход
В начале 2000-х на ЧАЭС были начаты работы по стабилизации конструкций старого Саркофага. Строителям потребовалась информация о радиационной обстановке снаружи железных стен. Учитывая невозможность использования подьемного оборудования, лестниц и т.д. – был разработан специальный робот, способный двигаться по вертикальным поверхностям Саркофага.
«Магнитоход» – так назвали ученые робота, который двигался по металлическим стенам Саркофага. Такое свойство механизм получил благодаря специальному устройству колес, которые были выполнены из постоянных магнитов. С помощью данного робота были обследованы северные клюшки Саркофага. «Магнитоход» был создан в 2002 году.

Рис. 6. Магнитоход, разработанный для ЧАЭС
Предназначен для использования в качестве подвижного модуля в составе робототехнических комплексов, способных выполнять работы на плоских и цилиндрических наклонных или вертикальных поверхностях при ликвидации последствий аварий в помещениях. На его грузовую площадку может быть установлено сменное навесное оборудование для выполнения осмотра, диагностических, ремонтных и других работ. При массе 8 кг магнитоход может нести полезную нагрузку до 15 кг.[4]
7. SnailBot: настенный робот без страха и упрека
Роботы, в отличие от людей, не боятся высоты, что позволяет им сколь угодно долго находиться на отвесных стенах, выполняя свои обязанности. Таковым является и новый механизм SnailBot, способный перемещаться по вертикальным поверхностям, благодаря особой конструкции, в основе которой лежит набор вакуумных дисков. В задней части машины располагается слот для сменных модулей, которые можно использовать для мытья окон, покраски стен, переноски объектов, произведения фотосъемки или даже (в случае чрезвычайной ситуации) спасения людей.
Для облегчения механизма, робот лишен автономного источника энергии, в то время как вычислительная единица, также как и воздушный компрессор, располагаются на крыше здания, передавая сигналы процессора по проводам, а к компрессору подведен шланг.[6]
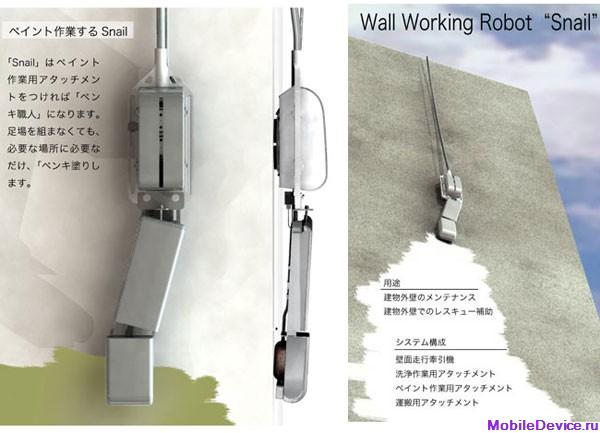
Рис. 7. SnailBot во время покраски стен
Заключение
Нами были рассмотрены различные мобильные роботы для выполнения вертикальных работ. Роботы отличаются, по форме, размерам, фиксации и перемещению по поверхности, по функциональным возможностям и по виду движения.
Первостепенное значение имеет то, что данные технологии позволяют решить вопрос сохранения здоровья и жизни людей при работе на большой высоте.
Список использованных источников:
Градецкий В.Г., Роботы вертикального перемещения, М.:Мин обр. РФ, 1997, 223с.
Abe T. Wall, Climbing robot for inspection of concrete structure//Journal of Robotics/SoJ, 1999.
Абаринов А.В., Управление роботами вертикального перемещения, Сб.конф. по управлению в мех. Системах, Львов, 1988, с 3-4.
http://chornobyl.in.ua/robot-dlia-chaes.html
http://ru.wikipedia.org/
http://robotor.ru/2011/05/30/wall-climbing-robots/