

Электромеханические приборы
структурная схема электромеханических приборов (с элементами классификации)
моменты, действующие в приборах
магнитоэлектрические измерительные приборы
магнитоэлектрический амперметр и вольтметр
магнитоэлектрический омметр
магнитоэлектрический гальванометр
баллистический гальванометр (применение для измерения магнитного потока)
электродинамические измерительные механизмы
электродинамический амперметр и вольтметр
электродинамический ваттметр
индукционный измерительный механизм
индукционный счетчик энергии
1. структурная схема электромеханических приборов (с элементами классификации)
![]()
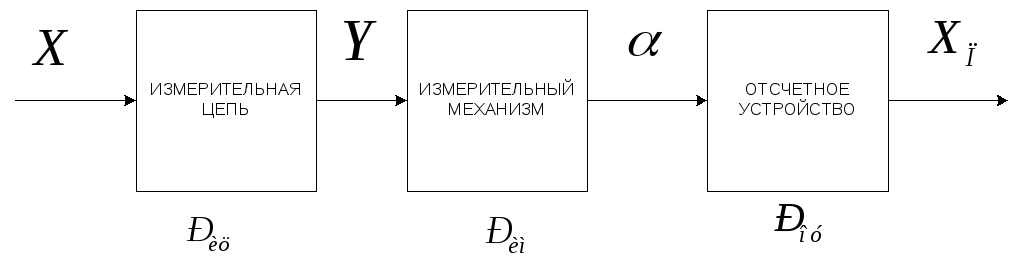
Риц, Рим, Роу – параметры ИЦ, ИМ, ОУ
![]() -однозначная
функция
-однозначная
функция
![]() нужно
либо стабилизировать параметры, либо
ввести схемы
нужно
либо стабилизировать параметры, либо
ввести схемы
коррекции (обычно в ИЦ)
2. моменты, действующие в приборах
вращательный момент

магнит возникает и тянет подвижную часть слева направо.
![]()
![]()
Так как подвижная часть обладает большой массой, то реагирует не на мгновенное значение, а на среднее.
![]()
противодействующий момент Мпр ( искусственный )
Мпр действует слева направо. Его можно создать механическим или электрическим путем.
![]()
Существует устойчивое положение равновесия, когда:
![]()

ПРИМЕР:

Получаются однозначные показания, т.е. каждому значению измеряемой величины соответствует одно показание.
Муст=Мвр-Мпр устанавливающий момент, который возникает сам, если:

Если прибор находится в состоянии равновесия, а его выводят из этого состояния, то появляется Муст.
Момент успокоения, возникающий в динамике


магнитоэлектрические измерительные приборы
с механическим противодействующим моментом
прибор с подвижной рамкой:
 N,S
– постоянные магниты.
N,S
– постоянные магниты.
ПН – полюсные наконечники.
С - сердечник.
ПР – подвижная рамка.
![]() - угол поворота.
- угол поворота.
Через рамку пропускается переменный или постоянный ток на низкой частоте. Рамка находится в магнитном поле индукции В. Форма ПН и С сделана так, что в зазоре обеспечивается радиальное, равномерное, постоянное поле индукции В.
ПН и С – из магнитномягкого материала.
NиS- из магнитотвердого материала.

![]() -чувствительность
по току
-чувствительность
по току
Особенности:

 шкала
прибора равномерная
шкала
прибора равномернаяприбор полярный
Логометр

Поверхности не цилиндрические.

Прибор для измерения соотношения токов.
4. магнитоэлектрические амперметры и вольтметры
АМПЕРМЕТР

 Ip-ток рамки
Ip-ток рамки
Надо
доказать, что схема миллиамперметра
обладает температурной погрешностью,
т.е.
![]()

 ,
следовательно, с ростом температурыIpуменьшается.
,
следовательно, с ростом температурыIpуменьшается.
Схема термокомпенсации:
Rт – термистр
Rm– манганиновое сопротивление

Многопредельный прибор:
Rдоб – добавочное сопротивление, служит для компенсации термопогрешности
Rш1,Rш2,Rш3 – сопротивление шунтов, рассчитанных на разные пределы
I1>I2>I3

ВОЛЬТМЕТР

 температурная погрешность маленькая
температурная погрешность маленькая
Электродинамический вольтметр

α = 1/w*Iнк*Iпк*cos(Iнк^Iпк)*dM/dα
Iнк=Iпк=![]() ;L=Lнк +Lпк
;L=Lнк +Lпк
Откуда: α = F1(U), но так же α =F1(w)
Емкость служит для уменьшения частотной погрешности
с





 w wL I α
w wL I α
с





 w 1/w*c I α
w 1/w*c I α
Если подобрать С, то можно уменьшить частично погрешность.
10)Электромеханический ваттметр

 P=Iн*Uн*cosφ
P=Iн*Uн*cosφ
Iн =Iнк
I
 пк
=
пк
=![]() tgα =wL/rR=Rпк +Rдоб
tgα =wL/rR=Rпк +Rдоб
 Iпк
=Ucosγ/R
Iпк
=Ucosγ/R
α = 1/w*Iнк*Iпк*cos(Iнк^Iпк)*dM/dα
P=Iн*U*cosφ
c os(φ-γ) =cos(Iнк^Iпк)
os(φ-γ) =cos(Iнк^Iпк)
Iнк = Iн =>
Iпк = U/R
α = 1/w*Iн*U/R*cos(φ - γ)*dM/dα
Н адо
γ 0 => cos γ = 1 => cos(φ - γ) = cosφ => α
= 1/w*Iн*U*cosφ*dM/dα
адо
γ 0 => cos γ = 1 => cos(φ - γ) = cosφ => α
= 1/w*Iн*U*cosφ*dM/dα
Шкала равномерная, если dM/dα (т.к. α прямо пропорциональнаcosφ)
Примечание
Самые высокоточные приборы, но на них влияют магнитные поля => они все экранированы
11)Принцип действия индукционного измерительного механизма
Обозначение:

Для создания момента вращения необходимо иметь не менее 2 переменных магнитных потоков, сдвинутых в пространстве и во времени.

M1,M2 –магнитопровода, потоки Ф1tи Ф2tпронизывают диск ; они сдвинуты относительно токов на α.
Токи сдвинуты относительно друг друга на φ.φ– потери.E1,E2– ЭДС
i
 1
Ф1t ;
i2
Ф2t
1
Ф1t ;
i2
Ф2t

ЭДС => в Alвозникают вихревые токи
E 1
i11
1
i11
E 2
i22
2
i22
Mврt = Mврt1 + Mврt2
Эти моменты возникают из-за взаимодействия вихревого тока и переменного магнитного потока
Mврt= Ф1t*i22+Ф2t*i11
Т.к подвижная часть обладает большим моментом инерциии то она реагирует на среднее значение.
Mвр = 1/To*∫Mврtdt = Ф1*I22*cos(Ф1^I22) + Ф2*I11*cos(Ф2^I11)
cos(Ф1^I22) = cos(90 + φ) = -sinφ
cos(Ф2^Iн) = cos(90 - φ) = sinφ
Вихревой ток всегда пропорционален частоте и потоку, который его вызвал
I22=cfФ2,Iн =cfФ1=>Mвр = сf[-Ф1Ф2sinφ+ Ф1Ф2sinφ] = сf(Ф1Ф2sinφ)
знак “-” чисто математический
12)Однофазный индукционный счетчик энергии
Предназначен для измерения энергии:
W=P*t=> накопление энергии со временем ,т.к. прибор интегрирующий
Части прибора:
1)измерительный механизм (п.11)
2)счетное устройство(число оборотов счетчика n)
W=Cном*N=>W=Д*N
Сном-номинальная постоянная счетчика
Для каждого счетчика есть действительная постоянная счетчика Cд ≠ Сн, ноCном ≈ Сдс погрешностью 0.2 (класс 0.2)



ТО – токовая обмотка
ОН – обмотка напряжения
*-генераторные концы:начало обмотки
Iн =Iо
Iон ≈U/w*Loн
ОН – имеет большое количество витков => большая индуктивность
Mвр =c*Ф1Ф2sin(Ф1^Ф2)
P=U*Iон*cosφ
Надо Mвр =P
I то
Фто ~Iн
то
Фто ~Iн
I он
Фон ~U
он
Фон ~U
Надо : sin(Ф1^Ф2) =sin[β–αI-φ]
Если β= 90, тоsin(Ф1^Ф2) =cos(φ)
Mт – тормозной момент ;cсоздается за счет взаимодействия поля специального тормозного момента с вихревыми токами,наводимыми при его вращении
Mт =k*dα/dt
Mвр = Мт =>k1p=k*dα/dt(**)
![]()
=> W=Cном*N
Cном =k/k1
Электронные приборы.
1.Общие сведения об электронных приборах
2.электронные вольтметры постоянного тока
3. электронные вольтметры переменного тока
4.комбинированный электронный вольтметр
5.селективный вольтметр
6. электронный веберметр
7. электронный милиомметр
1.см. все первые лекции

Обладают сравнительно невысокой точностью, т.е. нужно смотреть паспорт.
Чаще всего нужно комбинировать и устанавливать 0 (см. усилители) современные приборы обладают высокой точностью.
Выпуск на микросхемах и с микропроцессорами
2)электронный вольтметр постоянного тока
Схема1:без преобразования спектра
Схема2:cпреобразованием спектра
Схема1:

измеряет мВ и выше
УПТ- усилитель постоянного тока
ППИ – переключатель пределов измерений(делитель)
(чаще всего двух шкальный)
Отсчет производится с м/э им

Применение двухшкального прибора позволяет уменьшить γ
Tок(=) => нет преобразования спектра

УПТ=>не менее 10мВ,т.к. есть Uдр

Схема2 :
 микровольты
и меньше
микровольты
и меньше
Многошкальный,многопредельный

М-модулятор – преобразует постоянное Uв переменное; выходной сигнал обычно – меандр(если на микросхеме).Если сигнал малый то используем вибропреобразование.
Для демодуляторов (или МДМ - схема)-преобр. переменное Uв постоянное
СГ-синхронный генератор(опорный сигнал)
ППИ-переключатель пределов измерений
Есть преобразование по частоте => преобразование спектра
Малые сигналы ,т.к. усилитель переменного тока(нет Uдр)
3) электронные вольтметры переменного тока
U~
а)форма

б)частота f= отfminдоfmax
в)амплитуда А = от Аminдо Аmax
г)Umax?
U?
Ucр?
Частота
1)широкополосные вольтметры
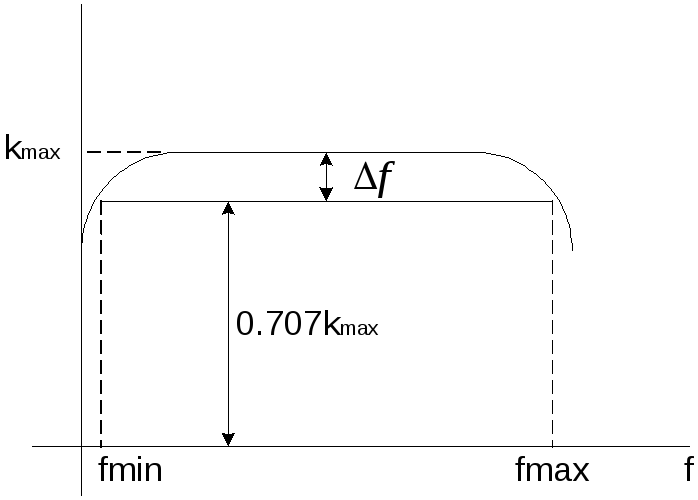
низкая помехозащищенность fmin<fпом <fmax=>помеха усиливается
Все вольтметры Inширокополосные
2)узкополосные
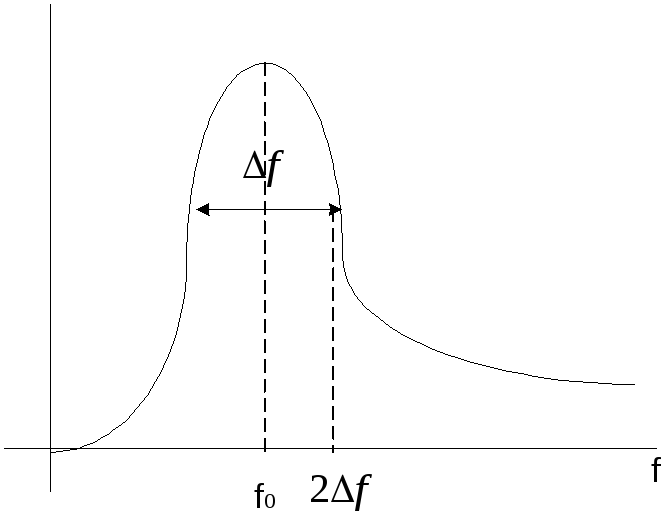
2Δf<<fo
fo-частота настройки
большая помехозащищенность т.к. узкая полоса пропускания(которую можно подобрать)
Широкополосные вольтметры
Схема1:выпрямитель-усилитель
Схема2: усилитель-выпрямитель
Схема1:

В – основная функция: ~ =
– основная функция: ~ =
другие функции можно получить Um,U,Uср(в зависимости от схемы)
“+”:обладает широким частотным диапазоном
“-”:относительно низкая чувтвительность(сотни миливольт)
2.Усилитель-выпрямитель

двухшкальный прибор более чувствительный(мкВ),
широкий частотный диапазон
3.Комбинированный универсальный вольтметр

Eo-образцовый источник
R1,R2,R3-образцовые сопротивления
Д-детектор,стоит в кабеле