

1. За функціональним призначенням пвп автоматичних систем поділяють на індикаторні, вимірювальні та комбіновані.
Індикаторні ПВП, що простіші за схемами і конструкціями, призначені для контролю без складного оброблення інформації. До таких ПВП належать сенсори наявності диму, вогню, охоронної сигналізації тощо.
Вимірювальні перетворювачі складніші, ніж індикаторні; до них ставляться значно жорсткіші вимоги, особливо в царині метрологічних характеристик, зокрема щодо їх метрологічної надійності. Це пов'язано з тим, що вимірювальні ПВП використовують як складові частини засобів вимірювань (вимірювальних каналів інформаційних вимірювальних систем), разом з якими ПВП застосовують для вимірювань значень перетворюваних цими ПВП фізичних величин.
2. Оскільки перетворення, які відбуваються в ПВП, пов'язані з витрачанням енергії, їх можна поділити на дві великі групи:
ПВП, які перетворюють енергію;
ПВП, які керують енергетичними потоками (модулюють енергетичні потоки).
3. За видом перетворюваних фізичних величин ПВП поділяють на дві великі групи: ПВП електричних величин і ПВП неелектричних величин.
Первинні вимірювальні перетворювачі електричних величин призначені для перетворювання електричних величин - електричного струму, напруги електричного струму, напруженостей електричного та магнітного полів, магнітної індукції, потужності, частоти струму тощо.
Первинні вимірювальні перетворювачі неелектричних величин становлять переважну більшість сучасних ПВП. їх призначено для перетворювання фізичних величин неелектричної природи - концентрацій рідких, газових, сипких і твердих речовин, механічних, гідравлічних, оптичних, акустичних та інших величин, великої кількості величин, які характеризують стан об'єктів, якість сировини та продукції (наприклад, вологість, щільність, деформацію, твердість, шорсткість, тиск крові, частоту пульсу, температуру тіла людини тощо).
4. За кількістю виконуваних функцій (найчастіше це кількість перетворюваних ПВП фізичних величин) ПВП бувають одно функціональними та багатофункціональними.
Багатофункціональні ПВП почали розвиватися років 10-15 тому завдяки використанню в ПВП досягнень мікроелектронної та мікропроцесорної техніки. Цей процес прискорюється і тепер.
5. За кількістю перетворюваних компонентів поля перетворюваної фізичної величини ПВП поділяють на одно-, дво- та трикомпонентні.
За фізичним принципом дії ПВП бувають фізичні (електричні, магнітні, теплові, оптичні, акустичні тощо), хімічні та комбіновані (фізико-хімічні, електрохімічні, біоелектричні тощо). Принцип дії ПВП визначається насамперед тим, яка закономірність використана в чутливому перетворювальному елементі або в чутливих перетворювальних елементах багатоелементного ПВП - фізична чи хімічна. Однак є ПВП (наприклад, механо-електричні), які не належать до якогось одного типу. їх називають комбінованими ПВП.
За видом перетворення фізичної величини ПВП поділяють на такі класи:
прямого одноступеневого та багатоступеневого перетворень - перетворювана фізична величина перетворюється в іншу фізичну величину, якою є вихідний сигнал ПВП;
непрямого перетворення - перетворювана фізична величина спочатку перетворюється в проміжну фізичну величину, а потім ця величина перетворюється у вихідний сигнал ПВП з використанням компенсаційного (зрівноважувального) методу;
комбінованого типу - одночасно використовують пряме і непряме перетворювання фізичної величини або кількох фізичних величин (частіше це відбувається у багатофункціональних ПВП, у ПВП з автоматичним коригуванням похибок тощо).
Перетворення фізичних величин ПВП завжди пов'язане з витрачанням енергії і (або) матерії (речовини). Залежно від того, використовується чи не використовується у ПВП для перетворення значення фізичної величини зовнішнє основне джерело енергії, ПВП поділяють на пасивні або параметричні, активні або генераторні та комбіновані.
За здатністю розрізняти змінення фази або полярності вхідної фізичної величини ПВП поділяють на реверсивні та нереверсивні. Реверсивні ПВП чутливі до змін полярності перетворюваної величини. У нереверсивних ПВП вихідний сигнал не залежить від полярності перетворюваної величини.
10. За характером зміни вихідного сигналу ПВП поділяють на три групи:
- з аналоговим вихідним сигналом, що безперервно змінюється;
з дискретним (наприклад, що імпульсно змінюється) вихідним сигналом;
з кодовим вихідним сигналом.
При цьому вихідні сигнали ПВП можуть бути електричними, механічними, пневматичними, акустичними, оптичними тощо, що пов'язано з відповідно використовуваними в них фізичними принципами перетворення бідних фізичних величин, призначеннями ПВП. Для побудови ПВП більш придатні класифікації ПВП за їх функціональним призначенням, видом і принципом перетворень фізичної величини, виглядом рівнянь, які описують процеси, що відбуваються в ПВП.
За виглядом математичних моделей, що описують їх. Одна з таких класифікацій передбачає поданий вище розподіл ПВП на лінійні, лінеаризовані та нелінійні.
За характером перетворення значень фізичних величин у часі ПВП поділяють на дві групи: ПВП безперервної дії та ПВП дискретної (циклічної) дії.
За характером взаємодії ПВП з об'єктом вони бувають стаціонарні та рухомі, контактні та безконтактні, просторово-розподілені, безперервні, дискретні, або багатоелементні та зосереджені, або одноелементні. Причому стаціонарні й рухомі, одноелементні та багатоелементні ПВП можуть бути як контактними, так і безконтактними. Прикладом безперервного просторово-розподіленого ПВП є волоконно-оптичний ПВП.
Безконтактні (не мають механічного контакту з об'єктом, інформаційний контакт ПВП з об'єктом має бути завжди) ПВП можуть бути такими, що сприймають зовнішнє поле (наприклад, теплове, оптичне, акустичне, електромагнітне), а також такими, що випромінюють і сприймають відбите від об'єкта поле. Перші нерідко називають також пасивними, бо вони не діють на об'єкт своїм первісним полем, а другі - активними.
За просторовою вибірковістю ПВП поділяють на дві групи: ПВП спрямованої дії та ПВП неспрямованої дії. За цією ознакою ПВП спрямованої дії мають дещо спільне з ПВП, які перетворюють визначену кількість просторових компонентів поля перетворюваної фізичної величини.
Крім ПВП тривалої дії, інколи використовують ПВП одноразової дії. Є також ПВП із ЧЕ, які витрачаються без поновлювання, і з ЧЕ, які періодично можна поновлювати або регенерувати.
В останні роки швидко розвивається новий напрям у створенні ПВП -створення та використання інтегральних ПВП. Завдяки використанню мікроелектронної технології, мікропроцесорної техніки і чутливих перетворювальних елементів, побудованих на нових фізичних, хімічних, фізико-хімічних та біоелектронних принципах перетворення фізичних величин, такі ПВП виконують як один пристрій (часто досить малих розмірів). Застосування таких ПВП дало змогу значно спростити і підвищити надійність функціональних перетворювачів, увести додаткові сервісні та метрологічні характеристики (самотестування, автокалібрування, зовнішнє керування алгоритмом функціонування). Такі вимірювальні перетворювачі називають інтелектуальними.
Ці ПВП зазвичай не ремонтуються, а замінюються після закінчення встановленого терміну роботи або в разі відмови. В особливо відповідальних застосуваннях ПВП їх резервують.
Ще один важливий напрям розвитку первинних перетворювачів - подальше вдосконалення первинних перетворювачів з уніфікованим вихідним сигналом, які набувають дедалі більшого поширення.
Під вимірювальним перетворювачем з уніфікованим вихідним сигналом розуміють первинний перетворювач та уніфікувальний перетворювач, які поєднані схемно, конструктивно й алгоритмічно для забезпечення уніфікації вихідного сигналу. При цьому уніфікацію здійснюють за такими основними характеристиками:
- інформативними параметрами (напругою, струмом, частотою, цифровим кодом тощо);
робочим діапазоном (0... 10 В; 0... 100 мВ; 0...5 мА тощо);
функціональною залежністю між значенням вимірюваної величини та значенням інформативного параметра вихідного сигналу (зазвичай ця залежність має бути лінійною).
Основні функції, які реалізує уніфікувальний перетворювач, можна розділити на лінійні (встановлення нуля, масштабування, компенсація температурних впливів тощо) та нелінійні (лінеаризація функції перетворення ПВП).
Сучасні технологічні процеси передбачають вимірювання великих масивів різних фізичних величин за допомогою різноманітних первинних перетворювачів. Розмаїття інформативних параметрів та робочих діапазонів їх значень значно ускладнюють побудову систем багатопараметричного контролю та керування технологічними процесами. Використання довгих ліній зв'язку між первинними перетворювачами і вторинними засобами вимірювання послаблює стійкість вимірювань до різноманітних зовнішніх чинників (насамперед електричних та електромагнітних завад).
Тому наразі розроблення вимірювальних перетворювачів з уніфікованим вихідним сигналом - це цілий напрям вимірювальної техніки, що набув значного розвитку за останні роки. Цьому сприяла поява нової елементної бази з мікроспоживанням, високим ступенем інтеграції, широким діапазоном робочих температур та високими метрологічними характеристиками. Здебільшого традиційні первинні перетворювачі розглядають не як закінчений виріб, а як складову частину перетворювачів з уніфікованим вихідним сигналом.
Новий напрям розвитку вимірювальних перетворювачів передбачає використання уніфікованих цифрових вихідних сигналів і роботу з так званими віртуальними вторинними засобами вимірювання на базі персональних комп'ютерів. Такі вимірювальні перетворювачі здебільшого мають гнучкий алгоритм функціонування і дістали назву інтелектуальних.
Найбільш поширені уніфікувальні перетворювачі сигналів постійного струму і напруги. До таких сигналів, наприклад, належать вихідні сигнали термопар, мостових вимірювальних схем постійного струму, потенціометричних сенсорів, каліброваних шунтів тощо. Окрім того, такі уніфікувальні перетворювачі часто є елементами складніших засобів вимірювання і забезпечують необхідний рівень (і форму) вихідного сигналу.
Тепер переважають вимірювальні перетворювачі з цифровим уніфікованим сигналом. Насамперед це зумовлено високою стійкістю цифрового сигналу до зовнішніх впливів, можливістю безпосередньої роботи з персональними комп'ютерами, можливістю паралельної роботи багатьох вимірювальних перетворювачів на спільній лінії зв'язку.
Фізичні основи побудови первинних вимірювальних перетворювачів.
У вимірювальних системах використовуються здебільшого електричні (значно рідше пневматичні, гідравлічні, оптичні тощо - і здебільшого як проміжні) сигнали у всьому ланцюжку - від вимірювання й до запису результатів, тому між досліджуваним об'єктом і вхідними пристроями вимірювальних систем завжди стоять вимірювальні перетворювачі типу фізична величина - електричний сигнал.
Електричний сигнал - це змінна складова струму або напруги, що несе інформацію, пов'язану з вимірюваною величиною; амплітуда й частота сигналу мають бути безпосередньо пов'язані з амплітудою й частотою вимірюваної величини. Електричні вихідні сигнали ПВП забезпечують широкі можливості для автоматизації вимірювань, керування технологічними процесами й обладнанням, технічними засобами наукового і вимірювального експерименту, безперервного виконання математичних операцій, пов'язаних з обробленням результатів вимірювань. Завдяки великому спектру частот і динамічному діапазону їх значень електричні сигнали забезпечують можливість перетворення як швидко-, так і повільнозмінних фізичних величин.
Під дією вимірюваної фізичної величини х ПВП видає еквівалентний сигнал, що є функцією вимірюваної величини:
у = φ(х),
де у та х - відповідно вихідна та вхідна величини ПВП (рис. 4, а).
Вимірявши значення у, можна визначити значення х. Співвідношення у = φ(х) виражає в загальній теоретичній формі фізичні закони, покладені в основу функціонування ПВП. Будучи вираженими чисельно, ці закони зумовлюють вибір конструкцій (геометрії та розмірів) і матеріалів для їх виготовлення, допустимі характеристики довколишнього середовища, в яких можуть працювати ПВП, та умови застосування. Для всіх ПВП співвідношення у = φ(х) у числовій формі визначають експериментально в результаті градуювання, за якого для деяких відомих значень х вимірюють відповідні значення у і будують градуювальну криву (рис. 4, б), з якої для всіх у,- можна одержати відповідні значення х, (рис. 4, в).
Найважливіша проблема у проектуванні та використанні ПВП - забезпечення сталості його чутливості, яка б щонайменше залежала від значень х (зумовлюючи лінійність характеристики перетворення) та частоти їх змін, від часу та впливу інших фізичних величин, що характеризують не сам об'єкт, а його оточення (їх називають впливовими величинами, тобто такими, що впливають на результати вимірювань).
Застосовують ПВП активного (генераторні), пасивного (параметричні) і комбінованого типів. Активні ПВП на виході видають заряд, напругу або струм, пропорційні вхідній величині, тобто вони є джерелом сигналу вимірювальної інформації. У пасивних ПВП пропорційно вхідній величині змінюються вихідний опір, індуктивність або ємність, тому параметричний ПВП має бути обов'язково ввімкненим у схему із зовнішнім джерелом живлення, а вимірювання здійснюється побічно, за змінюванням струму або напруги. Джерело електричного сигналу в цьому випадку - сукупність електричної схеми та пасивного ПВП.

Рисунок 4. Приклади змінювання в часі вимірюваної величини х і відповідної реакції у ПВП (а) та його градуювальної характеристики (б, в):
б- отримання градуювальної кривої за відомими значеннями вимірюваної величини х; в - використання градуювальної кривої для визначення хі.
Комбіновані ПВП використовують для вимірювання окремих неелектричних величин, які не вдається відразу перетворити в електричні. Це треба робити поетапно за допомогою двох перетворювачів. На першому етапі вихідну вимірювану величину перетворюють у проміжну неелектричну, на другому (за допомогою другого перетворювача) - у вихідну електричну. Сукупність цих двох перетворювачів і утворює комбінований ПВП. Наприклад, тиск можна вимірювати за допомогою мембрани, яка слугує первинним перетворювачем і деформація якої перетвориться в електричну величину перетворювачем (диференціально-трансформаторним, ємнісним, індуктивним тощо), який реагує на механічні зміщення.
Активні ПВП. Принцип дії активного ПВП ґрунтується на тому чи тому фізичному явищі, що забезпечує перетворення вимірюваної величини в електричну форму енергії. Найбільш важливі з фізичних явищ, які використовуються в активних ПВП, наведено в табл. 1, а принципи їх технічної реалізації ілюструють схеми на рис. 5.
Первинний вимірювальний перетворювач, що реалізує термоелектричний ефект, - термопара - містить два провідники (термоелектроди) А та В різної хімічної природи (рис. 5, а). їх з'єднання (спаї), що мають температури t1 і t2 є місцем виникнення термо-ЕРС е(t1 і t2). Термо-ЕРС є пропорційна вимірюваній температурі t1, коли температура t2 відома (неробочий спай термопари розміщено в середовищі з постійною температурою, яка дорівнює, наприклад, 0 °С).
Таблиця 1. Фізичні ефекти в активних ПВП
Вимірювана величина |
Використовуваний фізичний ефект |
Вихідна величина |
Температура |
Термоелектричний ефект |
Напруга |
Потік оптичного випромінювання
|
Піроелектричний ефект |
Заряд |
Зовнішній фотоефект |
Струм |
|
Внутрішній фотоефект у напівпровіднику з р~п-переходом |
Напруга |
|
Фотоелектромагніт-ний ефект |
Напруга |
|
Сила, тиск, прискорення |
П'єзоелектричний ефект |
Заряд |
Швидкість |
Електромагнітна індукція |
Напруга |
Переміщення |
Ефект Холла |
Напруга |
У ПВП з піроелектричним ефектом певні кристали, названі піроелектриками (наприклад, тригліцинсульфати), зазнають спонтанної електричної поляризації, що залежить від їх температури, і на поверхнях двох протилежних граней з'являються електричні заряди протилежних знаків, пропорційні цій поляризації (рис. 5, б). Поглинений кристалом потік випромінювання Ф зумовлює підвищення його температури та відповідну зміну поляризації, що вимірюється за зміною напруги на затискачах конденсатора.
У ПВП з п'єзоелектричним ефектом змінювання механічного напруження (від дії зовнішньої сили Г) у кристалі п'єзоелектрика, наприклад кварцу, призводить до деформації, що спричиняє появу на протилежних поверхнях кристала однакові за величиною електричні заряди протилежного знака (рис. 5, в). Отже, для вимірювання сили або величин, що приводять до неї (вібрації, тиску, прискорення), досить виміряти напругу між затискачами п'єзоелектрика.

Рисунок 5 - Приклади використання фізичних явищ для побудови активних ПВП.
Ефекти: а - термоелектричний; б - піроелектричний; в - п'єзоелектричний; г - електромагнітної індукції; д - фотоелектричний; є – Холла.
У ПВП, що використовує явище електромагнітної індукції, у разі переміщення провідника в постійному електромагнітному полі виникає ЕРС, пропорційна магнітному потокові, а отже, і швидкості руху провідника (рис. 5, г). Так само, коли замкнутий контур зазнає впливу змінного магнітного потоку під час переміщення в полі або самого контуру, або джерела поля (наприклад, магніту), індукована в контурі ЕРС дорівнює за величиною (і протилежна за знаком) швидкості змінювання магнітного потоку. Таким чином, вимірювання ЕРС електромагнітної індукції дозволяє визначити швидкість переміщення об'єкта, механічно з'єднаного з рухомим елементом подібного ПВП.
У ПВП використовуються також фотоелектричні ефекти, різні за своїми проявами, але об'єднані загальною причиною їх виникнення - звільненням електричних зарядів у речовині під дією світлового або, у більш загальному розумінні, електромагнітного випромінювання, довжина хвилі якого менша від певного граничного значення, що є характеристикою чутливого матеріалу (рис. 5, д).
Вакуумний фотоелемент із зовнішнім фотоефектом. Звільнені в ньому фотоелектрони залишають освітлений потоком Ф фотокатод й утворюють пропорційний освітленості струм, що надходить до анода під дією прикладеного електричного поля.
Напівпровідниковий фотодіод із внутрішнім фотоефектом. Електрони й дірки, звільнені в околі освітленого p – n - переходу в напівпровіднику, переміщуючись під дією електричного поля, зумовлюють змінення напруги на краях напівпровідника.
Первинні вимірювальні перетворювачі на основі фотоелектромагнітного ефекту. Прикладання магнітного поля, перпендикулярного до спадного випромінювання, викликає в освітленому напівпровіднику появу електричної напруги в напрямі нормалі до поля та спадного випромінювання. Фотоелектричні ефекти є основою фотометрії й забезпечують передавання інформації, носій якої - світло.
Первинні вимірювальні перетворювачі на основі ефекту Холла. У разі пропускання електричного струму через пластинку напівпровідника, що розміщена в однорідному магнітному полі (вектор магнітної індукції В становить кут θ з напрямом струму І), у напрямі, перпендикулярному до поля, виникає ЕРС :
uH = kH∙I∙B∙sinθ.
де kH залежить від типу провідності та розмірів пластини (рис. 5, e).
Первинні вимірювальні перетворювачі Холла використовують для вимірювання переміщень х об'єктів, а також величин, перетворюваних у переміщення, наприклад, тиску. Постійний магніт ПВП механічно з'єднують з об'єктом, і зі зміщенням магніту пропорційно змінюється вихідна напруга ПВП (струм при цьому залишається незмінним).
Таблиця 2. Фізичні ефекти в пасивних ПВП
Вимірювана величина |
Електрична характеристика, що змінюється під дією вимірюваної величини |
Тип використовуваних матеріалів |
Температура |
Опір |
Метали (платина, мідь, нікель), напівпровідники |
Наднизькі температури |
Діелектрична проникність |
Скло, кераміка |
Потік оптичного випромінювання |
Опір |
Напівпровідники |
Деформація
|
Опір |
Сплави нікелю, легований кремній |
Магнітна проникність |
Феромагнітні сплави |
|
Переміщення |
Опір |
Магніторезистивні матеріали: вісмут, антимонід індію |
Вологість |
Опір Діелектрична проникність |
Хлористий літій, оксид алюмінію, полімери |
Рівень |
Діелектрична проникність |
Рідкі ізоляційні матеріали |
Пасивні ПВП. Як уже зазначалося, пасивні ПВП вмикаються в спеціальну електричну схему, що містить джерело живлення та схему формування сигналу. Ряд фізичних ефектів і матеріалів, використовуваних для створення пасивних ПВП, наведено в табл. 2.
Найчастіше використовують потенціометричну та мостову вимірювальні схеми, а також коливальний контур і операційний підсилювач. Потенціометрична схема містить джерело напруги та ПВП-потенціометр, що з'єднані паралельно. Найпростішу схему потенціометричного перетворювача, в якому механічні зміни на вході (зміщення - лінійні чи кутові) спричинюють появу на його виході електричного сигналу, пропорційного вхідному сигналові, показано на рис. 6.
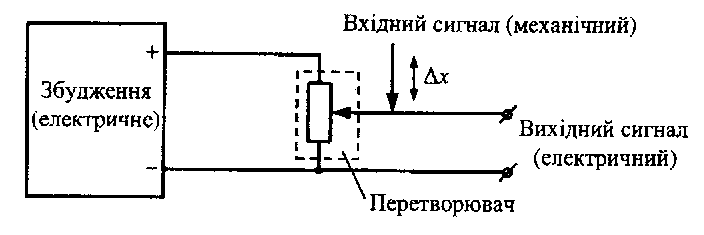
Рисунок 6 - Схема пасивного перетворювача.
У мостовій схемі змінення імпедансу ПВП характеризує розбаланс відповідного моста (Уїтстона, Максвелла, Сауті, Віна тощо). Резонансний коливальний контур є частиною генератора коливань і визначає його частоту. Коли індуктивний або ємнісний ПВП є елементом цього контуру, варіації його реактивного опору зумовлюють відповідні зміни частоти коливань. Операційний підсилювач використовують для оброблення вихідного сигналу, що являє собою різницю двох сигналів вимірювальної схеми. Залежно від цієї різниці змінюється коефіцієнт підсилення операційного підсилювача.
Від вибору схеми формування сигналу залежать основні метрологічні характеристики вимірювальних комплексів - похибка, чутливість, лінійність і т. ін.
Комбіновані ПВП. Під час вимірювання деяких неелектричних величин не завжди вдається перетворити їх безпосередньо в електричну величину. У цих випадках здійснюють подвійне перетворення вихідної (первинної) вимірюваної величини - спочатку в проміжну неелектричну величину, яку відтак перетворюють у вихідну електричну величину. Сукупність двох відповідних вимірювальних перетворювачів утворює комбінований ПВП.
Подібні перетворення зручні для вимірювання механічних величин, що спричиняють у первинному перетворювачі (ЧЕ) деформацію або переміщення вихідного елемента, до яких чутливий вторинний перетворювач, так, тиск можна виміряти за допомогою сильфона, деформація якого перетвориться в електричну величину вимірювальним перетворювачем, що реагує на механічне зміщення, наприклад потенціометричним (рис. 7).
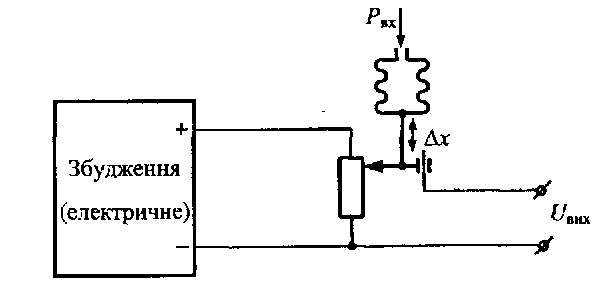
Рисунок 7 - Схема комбінованого перетворювача.
Усі функції активних, пасивних і комбінованих ПВП аналогові, тому в загальному випадку їхні сигнали теж аналогові.
Впливові величини. У реальних умовах експлуатації ПВП може зазнавати впливу не тільки вимірюваної величини, але й інших фізичних (впливових) величин gi, до яких чутливий ПВП, - температури, тиску, вібрації, вологості, електричних і магнітних полів і т. ін. Ці впливи можуть призвести до зміни вихідного електричного сигналу ПВП та до появи додаткової похибки вимірювання, тому ПВП, призначений для перетворення певної фізичної величини, повинен якомога менше змінювати свої характеристики під впливом інших параметрів gi. Таким чином, вихідний сигнал ПВП у має залежати тільки від однієї величини х, а всі прирости вихідного сигналу Δукі, зумовлені зміною зовнішних параметрів gi. мають бути малими навіть порівняно з граничною (пороговою) чутливістю ПВП Δупорі : Δуgi << Δупорі.
Для цього потрібно виконати одну з умов:
знизити значення впливових величин відповідним захистом ПВП, використовуючи, наприклад, магнітні екрани, антивібраційні підкладки тощо;
стабілізувати впливові величини та градуювати ПВП для цих умов, використовуючи, наприклад, термостат, джерело стабілізованої напруги живлення тощо;
використовувати таку схему, яка б компенсувала вплив паразитних величин, наприклад, міст Уїтстона із двома однаковими ПВП, один з яких призначений для вимірювання, а другий - для компенсації похибки, спричиненої дією впливових чинників.
Здавалося б, умова малості Δуgi не обов'язкова, тому що можна вимірювати всі gi, у процесі досліджень, а відтак уводити відповідні поправки. Насправді ж це роблять тільки у виняткових випадках, адже подібна організація дослідження економічно невигідна, оскільки необхідність додаткового вимірювання всіх gi погребує додаткових ресурсів і нераціонально завантажує автоматизовану систему. Крім того, істотно зростають витрати на проведення калібрувальних вимірювань, а додаткові вимірювання констант для обчислення поправок і знаходження аналітичної залежності для визначення поправок у проміжних точках (у яких не були проведені калібрувальні вимірювання) виконуються завжди з похибками, що неминуче збільшує повну похибку вимірювання.
Виходячи з викладеного, прагнуть вибирати ПВП, показання яких якомога менше залежали б від зовнішніх параметрів. Причому зазвичай набагато вигідніше стабілізувати зовнішні умови, ніж проводити калібрування та додаткові вимірювання відповідних параметрів.
Загальні підходи до вибору перетворювача. У загальному випадку для вибору перетворювача розглядають три основні умови:
потрібні характеристики перетворювача;
тип перетворювача;
уживаний ЧЕ.
Характеристики перетворювача. Є декілька параметрів, які варто враховувати, вибираючи перетворювач для конкретного використання:
- чутливість - вихідний сигнал, який виробляє перетворювач за заданих значень вхідного сигналу та рівня збудження (Еживл.) ;
-розрізнення - найменший вхідний сигнал, який можна виміряти;
відтворюваність - показує, наскільки наближені результати двох вимірювань однієї й тієї ж величини;
точність - залежить (серед іншого) від робочих умов, потребує врахування впливу навколишнього середовища;
частотна характеристика - це залежність вихідного сигналу від змін частоти на вході; вона має бути плоскою в діапазоні вимірювань, а резонансна частота - бути за його межами;
динамічна характеристика перетворювача — визначає його реакцію на східчасту зміну вхідного сигналу. Характеризується сталою часу - це час, потрібний перетворювачу, щоб досягти 63 % приросту вихідного сигналу. Час, потрібний перетворювачу для досягнення 90 % від рівня його кінцевого сигналу, називають часом відгуку перетворювача.
Крім того, необхідно враховувати лінійність характеристики перетворювача (зокрема, наявність гістерезису), стійкість до шумів тощо.
Тип перетворювача (найчастіше перетворювачі класифікують за принципом дії чи за практичним використанням) і сфера його використання взаємопов'язані. Наприклад, тензоперетворювач можна використовувати для перетворень тиску (сили), зміщення, положення, швидкості, прискорення, вібрації, потенціометричний і лінійний диференціально-трансформаторний перетворювачі – для перетворення перших п'яти параметрів, а термоелектричний перетворювач - тільки для температури.
Чутливі (силові) елементи. Чутливий елемент (ЧЕ) здійснює первинне перетворення вимірюваної величини і може бути як складовою конструкції перетворювача, так і окремим пристроєм. Його вибір визначається (попри інші характеристики) тим, який вид вхідного сигналу сприймає наступний за ним перетворювач. Якщо на його вхід подаватиметься лінійне зміщення Δх, то вибраний ЧЕ має перетворювати вимірювану величину саме у Δх, наприклад, для вимірювання тиску (або рівня рідини) як ЧЕ можна використовувати різні мембрани, сильфони (рис. 8, а), манометричні трубки тощо. А якщо на вхід перетворювача треба подати кутове зміщення α, можна використати скручену трубку Бурдона чи спіральну манометричну пружину (рис. 8, б).
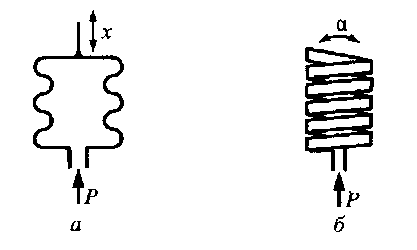
Рисунок 8 - Пружні чутливі елементи: а - сильфон, б - спіральна (багатовиткова) манометрична пружина.
Поряд із входом важливе значення має також природа вихідного сигналу, позаяк саме вона визначає вибір методів і для подальшого перетворення чи вимірювання.
І навпаки, якщо є конкретний ЧЕ, то для нього треба підбирати відповідний перетворювач. Наприклад, для сильфона - диференціально-трансформаторний або потенціометричний з лінійним зміщенням повзунка реохорда, а для спіральної манометричної пружини - феродинамічний чи реостатний з кутовими зміщеннями рамки у першого та повзунка у другого.
Використання математичної моделі в режимі первинного вимірювального перетворювача. Математична модель об'єкта керування (в цьому разі ним найчастіше є технологічний процес або окрема його стадія) пов'язує між собою у формалізованій формі вихідні та вхідні параметри об'єкта керування. Потреба у використанні моделі замість ПВП виникає у випадку, коли з якихось причин деякі з керованих параметрів (найчастіше це якісні показники процесів) не можна виміряти. Тоді виміряні значення цих параметрів замінюють прогнозованими, отриманими реалізацією математичної моделі засобами мікропроцесорної техніки, що входять до складу системи керування.
Розглянемо принципи функціонування математичної моделі в такому (вимушеному) режимі на прикладі виробництва амофосу - поширеного фосфорного мінерального добрива (рис. 9).
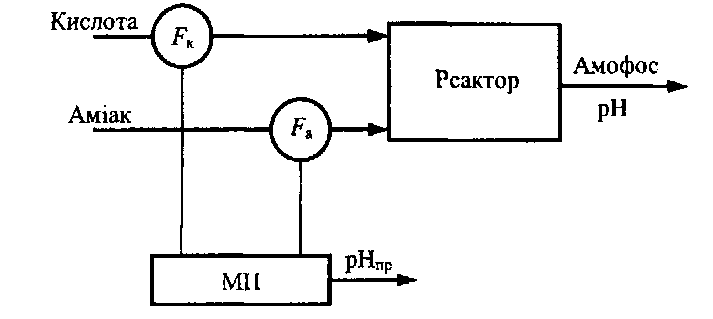
Рисунок 9 - Приклад використання математичної моделі в режимі ПВП у виробництві амофосу.
Амофос отримують із фосфорної кислоти та аміаку, сполучаючи їх у реакторі, у якому перебігає реакція нейтралізації (не повна) з утворенням кислого середовища з рН ~ 5,3. Сліди плавикової кислоти, що є у фосфорній кислоті, руйнують мембранне скло електродів рН-метра, тому для визначення (прогнозування) значення рН застовують розроблену математичну модель об'єкта керування. Побудуємо модель, яка дозволила б прогнозувати рН у виробленому амофосі.
На величину рН на виході з реактора впливає ряд чинників:
рН = (Fa, Fk, Ck, ta, tk, tc),
де Fa, Fk - витрати аміаку та кислоти; Ск - концентрація кислоти; ta, tk, tc - температури аміаку, кислоти та довколишнього середовища.
Математичну модель створювали експериментально із застосуванням методу планування експерименту, тому вона справедлива лише для конкретного об'єкта і тільки в межах досліджених значень її параметрів, хоча структура моделі більш універсальна.
Як виявилося, температурні показники потоків і довкілля слабо впливають на вихідну величину (рН), тому їх можна вилучити з моделі. Концентрація кислоти Ск, хоча й дуже сильно впливає на рН, однак її теж треба вилучити, позаяк, наприклад, її теж не можна виміряти (тоді для зменшення впливу Ск її, по можливості, слід стабілізувати).
Таким чином, у моделі залишилося два впливові параметри:
рН = (Fa, Fk).
Для вибраних діапазонів змінювання витрат ΔFa, Δ Fk можна обрати таку структуру моделі:
рНпр = рН0 ± k1Δ Fa ± k2Δ Fk ± k3ΔFaΔ Fk.
де рНпр - прогнозоване значення рН; рН0 = 5,3 - номінальне значення рН; k1, k2, k3 - коефіцієнти моделі.
За виміряними значеннями витрат ΔFa, та Δ Fk реалізуючи розроблену модель, можна прогнозувати величину рН на виході реактора. Прогнозоване значення рНпр буде залишатися правильним доти, доки невраховані чинники будуть залишатися незмінними та дорівнювати значенням, які вони мали під час експерименту.
Зміна значень неврахованих чинників погіршуватиме точність моделі, тобто прогнозоване значення рНпр відрізнятиметься від дійсного. За таких умов модель належить перевірити щодо адекватності, порівнюючи значення, отримані через реалізацію моделі рНпр, із дійсними значеннями рНд, отриманими за допомогою лабораторних вимірювань. Умову адекватності можна записати як
рНпр – рНд ≤ ε,
де ε - задане значення допустимої похибки.
Якщо отримані результати не задовольняють умову адекватності, модель піддають адаптації, у процесі якої за допомогою спеціально розробленого алгоритму, що вводиться в дію оператором, знаходять нові значення коефіцієнтів k1, k2, k3.
Перспективи розвитку сенсорної техніки. Сенсор (ПВП) - наймасовіший вимірювальний засіб. Сукупність ПВП на об'єкті дослідження формує вимірювальну інформацію, придатну для її подальшого використання людиною, обчислювальною машиною чи пристроєм у контурі керування досліджуваним об'єктом. Ця особливість і обумовлює основні вимоги до ПВП. Він має надійно функціонувати в усіх робочих середовищах досліджуваного об'єкта і водночас надійно працювати як елемент конструкції основного виробу.
Закладені в будову сучасного сенсора конструктивні рішення мають забезпечувати можливість встановлювати його в будь-яку вимірювальну систему. Конструктивне вирішення цієї проблеми полягає у модульному конструюванні за всіма правилами агрегатування та системного підходу, тобто застосовувані конструктивні та технологічні рішення мають задовольняти умови конструктивної, технологічної, метрологічної, інформаційної, алгоритмічної сумісності.
Одна з важливих вимог до ПВП - обґрунтований вибір виду вихідного сигналу. Очевидно, що стандартним сигналом повинен бути сигнал, мінімально енергоємний та максимально стійкий до завад. Таким, безумовно, є частотно-модульований сигнал, а перетворюватись амплітудно-модульований сигнал в частотно-модульований має в самому сенсорі.
Розвиток електронної технології призвів до ситуації, коли сучасні електронні засоби вимірювальної техніки як вторинні перетворювачі електричних засобів вимірювань неелектричних величин мають на один-два порядки вищі метрологічні характеристики, ніж первинні перетворювачі. Тобто натепер первинні перетворювачі - основні елементи вимірювальних кіл засобів вимірювань неелектричних величин, від чутливості, точності, швидкості та стійкості яких до зовнішніх чинників залежать повнота, своєчасність і достовірність отримуваної інформації про досліджувані об'єкти та процеси. Тому сьогодні приділяють велику увагу і виділяють значні кошти на проведення наукових досліджень, конструкторських робіт для поліпшення існуючих та створення нових первинних перетворювачів.
Основні напрями розвитку сучасних первинних перетворювачів зводяться до такого:
поліпшення технології виготовлення традиційних первинних перетворювачів;
створення нових конструкцій перетворювачів на відомих принципах;
використання нових методів та фізичних закономірностей, що закладаються в основу принципу дії перетворювачів;
інтеграція первинних перетворювачів та елементів вторинних засобів вимірювань у єдиний конструктив для зменшення впливу ліній зв'язку на результат вимірювань та забезпечення повнішої уніфікації за вихідним сигналом.
Перший напрям значною мірою вже вичерпав себе, хоча використання досконаліших конструкцій і підвищує стійкість первинного перетворювача до впливових чинників, а застосування для ЧЕ матеріалів, ретельно очищених від небажаних домішок, підвищує стабільність їх характеристик.
Перспективніший напрям - створення нових конструкцій перетворювачів за традиційними принципами. Такий напрям спирається на позитивний досвід виготовлення й експлуатації існуючих конструкцій первинних перетворювачів і не потребує великих фінансових затрат, які були б потрібними для дослідження нових фізичних ефектів.
Значну частину від нових первинних перетворювачів становлять мініатюрні перетворювачі механічних величин та параметрів руху з використанням напівпровідникових мембранних ЧЕ резистивного та ємнісного типів, а також п'єзоелектричних та магнітопружних перетворювачів, що в поєднанні з лінсаризувальними й підсилювальними елементами Утворюють перетворювачі з уніфікованим вихідним сигналом.
Для виявлення та контролю концентрації оксидів в атмосфері відомі перетворювачі па основі кварцових резонансних структур, які складаються з двох ідентичних п'єзоелементів певного зрізу з однаковими резонансними частотами. Один з кристалів покритий газочутливою плівкою, а другий – ні. Резонансна частота кристала з газочутливою плівкою змінюється залежно від ступеня абсорбції досліджуваного газу. Міра вимірюваної величини – різниця частот резонаторів.
Швидкими темпами розвиваються оптоволоконні перетворювачі, зокрема, перетворювачі переміщень, що ґрунтуються на принципі модуляції відбитого світла. Оптоволоконні перетворювачі застосовують як перетворювачі швидкостей газів та рідин, концентрацій (зокрема, як первинні перетворювачі вологомірів).
Надзвичайно інтенсивний розвиток сучасної мікроелектроніки уможливив здійснення метрологічного оброблення інформативного сигналу та передавання результатів з використанням стандартних інтерфейсів. Це дозволило значно знизити вимоги до лінії зв'язку, підвищити надійність, точність та завадостійкість вимірювань. Використання високопродуктивних мікропроцесорних засобів з мікроспоживанням у мініатюрному виконанні дало змогу реалізувати складні алгоритми автокалібрування вимірювального тракту та самодіагностики. Тому основна вимога до первинних перетворювачів, які перетворюють вимірювану величину в електричний сигнал, - стабільність їх статичної функції перетворення. Розвиток таких інтелектуальних перетворювачів значно спростив побудову вимірювальних мереж багатоточкового контролю.