

Дискретизация внешнего контура положения
Основным вопросом при дискретизации непрерывного регулятора является выбор периода дискретизации T. Необходимо разрешить противоречие между следующими требованиями: 1) слишком малое значение T усложняет техническую реализацию; 2) слишком большое T приводит к недопустимой потере информации, в результате чего замкнутая система может оказаться неустойчивой, хотя в непрерывной системе существовала область устойчивости.
Период дискретизации T выбирается путем приближений. Для выбора начального значения T можно воспользоваться теоремой Котельникова – Шеннона, которая утверждает, что частота дискретизации должна быть более чем в 2 раза выше максимальной частоты в спектре сигнала. Спектр сигналов, циркулирующих в контуре регулирования, определяется максимальными по модулю собственными значениями, которые были назначены при синтезе. Примем, что максимальная частота в спектре сигналов в 10 раз выше максимального модуля собственного значения. Согласно (4):
![]()
Приближенное значение периода дискретизации находится так:
![]()
![]()
![]() . (14)
. (14)
Полученная модель системы с дискретным внешним контуром изображена на рисунке 7. Так как регулятор контура положения – пропорциональное звено, то дискретизация при правильно выбранном периоде T не окажет какого либо существенного влияния на СС.
Реализация пропорционального регулятора в цифровом виде может показаться нерациональной. Однако, в силу специфики данной задачи датчики положения – цифровые по самому принципу их действия, поэтому целесообразно реализовать сумматор и усилитель для внешнего контура положения на одной микросхеме. Такой подход позволяет использовать всего один ЦАП, что снижает погрешности и экономически эффективно; также можно быстро менять настройку П-регулятора и, при необходимости, изменить закон регулирования.

Рисунок 7. Структурная схема с дискретным внешним контуром
Моделирование сс
Исследование динамических свойств
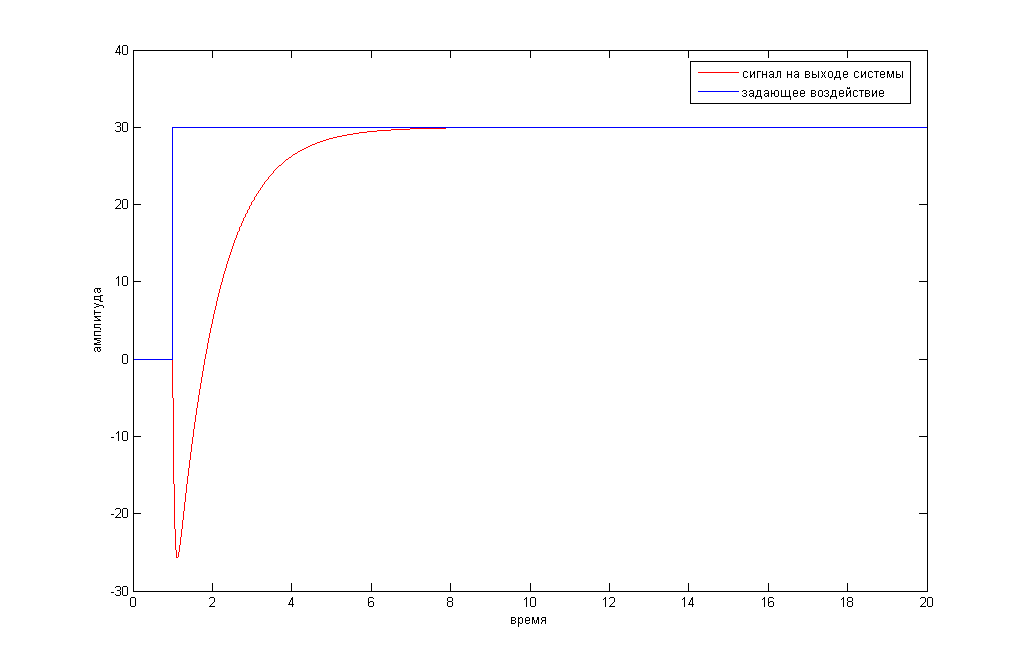
Переходная
характеристика замкнутой системы по
управляющему воздействию при отсутствии
возмущений представлена на рисунке 5.
На рисунке 8 представлено эквивалентное
гармоническое воздействие
![]() и сигнал на выходе СС. По рисунку 6 видно,
что ошибка не превышает допустимой.
и сигнал на выходе СС. По рисунку 6 видно,
что ошибка не превышает допустимой.

Рисунок 8. Эквивалентное гармоническое воздействие и сигнал на выходе системы
Проверим
как ведет себя СС при наличии возмущений.
На рисунке 9 представлена реакция
системы на скачкообразное изменение
нагрузки с нулевой до номинальной для
данного двигателя (![]() ).
Видно, что по каналу возмущения система
– статическая. Что недопустимо для
данной СС.
).
Видно, что по каналу возмущения система
– статическая. Что недопустимо для
данной СС.

Рисунок 9. Реакция системы на скачкообразное изменение момента нагрузки
Для уменьшения влияния возмущающего воздействия вместо П-регулятора положения применим ПИ-регулятор. Подбор параметров ПИ-регулятора будем проводить по ЛАЧХ системы с разомкнутым внешним контуром при помощи программы Matlab/SISO Design Tool. На рисунке 10 приведены ЛАЧХ системы, ПИ-регулятора и системы с регулятором. Передаточная функция ПИ-регулятора положения имеет следующий вид:
![]() . (15)
. (15)

Рисунок 10. ЛАЧХ системы, ПИ-регулятора и системы с регулятором.
Система
с ПИ-регулятором положения имеет запасы
устойчивости, практически такие же,
как и с П-регулятором (запас по фазе
![]() ,
по амплитуде
,
по амплитуде![]() ).
Однако динамика системы ухудшилась:
время регулирования
).
Однако динамика системы ухудшилась:
время регулирования![]() ,
перерегулирование
,
перерегулирование![]() (рисунок 11).
(рисунок 11).
На рисунке 12 представлена реакция системы на возмущающее воздействие (скачкообразное изменение момента сопротивления от нулевого до номинального). Видно, что ПИ-регулятор положения позволяет устранить статическую ошибку по возмущению.
На
рисунке 13 представлено эквивалентное
гармоническое воздействие
![]() и сигнал на выходе СС. По рисунку 14
видно, что в системе ПИ-регулятором
ошибка также, как и при использовании
П-регулятора, не превышает максимально
допустимую. На рисунке 15 приведена
реакция системы на линейно нарастающее
задающее воздействие, на рисунке 16 -
ошибка системы при воспроизведении
такого воздействия.
и сигнал на выходе СС. По рисунку 14
видно, что в системе ПИ-регулятором
ошибка также, как и при использовании
П-регулятора, не превышает максимально
допустимую. На рисунке 15 приведена
реакция системы на линейно нарастающее
задающее воздействие, на рисунке 16 -
ошибка системы при воспроизведении
такого воздействия.
По рисунку 17 видно, что хотя система с ПИ-регулятором и астатическая, но амплитуда ошибки по возмущающему воздействию недопустимо велика. Т. е. СС не пригодна для отработки «малых» перемещений. Чтобы устранить этот недостаток требуется введение компенсации возмущающего воздействия.

Рисунок 11. Переходная характеристика системы с ПИ-регулятором положения

Рисунок 12. Реакция системы с ПИ-регулятором положения на возмущающее воздействие

Рисунок 13. Эквивалентное гармоническое воздействие и сигнал на выходе системы с ПИ-регулятором

Рисунок 14. Ошибка воспроизведения гармонического задающего воздействия

Рисунок 15. Линейно нарастающее задающее воздействие и сигнал на выходе системы

Рисунок 16. Ошибка при воспроизведении линейно нарастающего задающего воздействия
Рисунок
17. Реакция системы на скачкообразное
задающее воздействие (изменение от
нуля до![]() )
при одновременном скачкообразном
возмущающем воздействии, соответствующем
номинальному моменту ИД
)
при одновременном скачкообразном
возмущающем воздействии, соответствующем
номинальному моменту ИД