

МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
САНКТ-ПЕТЕРБУРГСКИЙ ГОСУДАРСТВЕННЫЙ ЭЛЕКТРОТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ (“ЛЭТИ”)
Факультет компьютерных технологий и информатики
Кафедра автоматики и процессов управления
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА К КУРСОВОМУ ПРОЕКТУ
ПО ДИСЦИПЛИНЕ
«ЛОКАЛЬНЫЕ СИСТЕМЫ УПРАВЛЕНИЯ»
Электронная следящая система воспроизведения угла (эсс)
Выполнили: Азаренков Л. Г.
Группа: 2321
Проверил: проф. Терехов В. А.
Санкт-Петербург 2005
СОДЕРЖАНИЕ
СОДЕРЖАНИЕ 2
ВВЕДЕНИЕ 4
ЗАДАНИЕ 6
1.ВЫБОР КОМПОНЕНТОВ И СОСТАВЛЕНИЕ РАССЧЕТНОЙ СТРУКТУРНОЙ СХЕМЫ 7
1.1.Выбранные компоненты для реализации системы 7
1.2.Составление расчетной структурной схемы 9
2.РАСЧЕТ ПФ РЕГУЛЯТОРОВ 11
2.1.Настройка внутренних контуров на модульный оптимум 11
2.2.Настройка внешнего контура СС 12
2.3.Дискретизация внешнего контура положения 16
3.МОДЕЛИРОВАНИЕ СС 18
3.1.Исследование динамических свойств 18
3.2.Исследование чувствительности СС 22
3.3.Исследование влияния нелинейностей 22
ЗАКЛЮЧЕНИЕ 27
СПИСОК ЛИТЕРАТУРЫ 29
ВВЕДЕНИЕ
Целью курсовой работы является приобретение практических навыков расчета и моделирования типовых локальных система автоматического управления (САУ).
В качестве примера использована следящая система (СС) воспроизведения угла, представленная на рисунке 1.
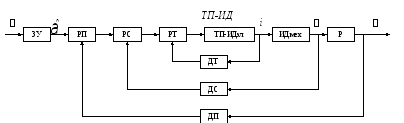

Рисунок 1. Функциональная схема следящей системы воспроизведения угла
На рисунке 1 приняты следующие обозначения:
ЗУ – задающее устройство;
РП – регулятор положения;
РС – регулятор скорости;
РТ – регулятор тока;
ДТ – датчик тока;
ДС – датчик скорости;
ДП – датчик положения;
ТП – тиристорный преобразователь;
Р – редуктор;
ИДэл – часть ПФ ИД, учитывает инерционность якоря;
ИДмех – часть ПФ, учитывает инерционность механической части ИД;
Данная СС реализует принцип подчиненного регулирования. В системе имеется 3 контура: контур регулирования тока якоря ИД, контур скорости и внешний контур регулирования положения (угол ) исполнительного вала. Введение подчиненных контуров скорости и тока позволяет уменьшить влияние нелинейностей, уменьшить чувствительность к изменениям параметров элементов системы, а также снизить восприимчивость системы к возмущающим воздействиям (изменение момента на валу двигателя).
Силовая часть СС построена по схеме «тиристорный преобразователь (ТП) — исполнительный двигатель (ИД) постоянного тока». ТП по принципу своей работы является дискретным элементом. Воздействие на управляемый преобразователь осуществляется импульсно, подачей отпирающего импульса на управляющий электрод тиристора. При этом среднее значение тока, протекающего через ТП (и соответственно якорь ИД) зависит от фазы отпирающего импульса. Для уменьшения пульсаций в питающей сети применяются многотиристорные схемы и многофазное электроснабжение. Реверсирование двигателя обеспечивают две группы тиристоров, соответственно для движения вперед и назад. Управление тиристорным преобразователем осуществляется системой импульсно-фазового управления (СИФУ), она не представлена на схеме.
На
вход CC
посредством ЗУ подается угол .
РП вырабатывает сигнал управления
пропорционально рассогласованию
![]() .
Далее управляющий отрабатывается
внутренними контурами скорости и тока.
ИД с редуктором развивает момент сил
.
Далее управляющий отрабатывается
внутренними контурами скорости и тока.
ИД с редуктором развивает момент сил![]() ,
достаточный для преодоления момента
нагрузки
,
достаточный для преодоления момента
нагрузки![]() ,
создаваемого объектом. Очевидно,
что
,
создаваемого объектом. Очевидно,
что![]()
![]() .
Таким образом исполнительный вал
перемещается в заданное положение.
Изменение нагрузки на валу является
возмущающим воздействием. Качество
системы определяется способностью
системы точно отрабатывать задающее
воздействие в динамике и статике,
несмотря на возмущения.
.
Таким образом исполнительный вал
перемещается в заданное положение.
Изменение нагрузки на валу является
возмущающим воздействием. Качество
системы определяется способностью
системы точно отрабатывать задающее
воздействие в динамике и статике,
несмотря на возмущения.