

Міністерство науки та освіти Украйни, молоді та спорту
Донбаська державна машинобудівна академія
Кафедра: «Електромеханічні системи автоматизації та електропривод»
ПОЯСНЮВАЛЬНА ЗАПИСКА
ДО КУРСОВОГО ПРОЕКТУ
з дисципліни :« Системи керування електроприводом»
Тема:« Розробка системи керування приводом підйому мостового крану вантажопідйомністю 20 т.»
Виконав:
студент гр. ЕСА 08–1
Березніченко З.О.
Керівник роботи:
Івченков М.В.
Краматорськ 2012 р
Міністерство науки та освіти України, молоді та спорту
Донбаська державна машинобудівна академія
Кафедра: «Електромеханічні системи автоматизації та електропривод»
ЗАВДАННЯ
до курсової роботи
з теми: «Аналіз системи керування приводом підйому мостового крану вантажопідйомністю 20 т »
з дисципліни : «Системи керування електроприводом»
Проаналізувати та змоделювати систему керування для приводу підйому мостового крана вантажопідйомністю 20 т.
Кран розміщується с метало оброблювальному цеху.
Живлення мережі U, В 380
Частота мережі f, Гц 50
Висота підйому H, м 6
Завдання видано: . 2011
Дата захисту: . .2012
Керівник роботи: Івченков М.В. _________ (підпис)
Завдання прийняв: Березніченко З.О. _________ (підпис)
РЕФЕРАТ
Курсова робота студента групи ЕСА 08-1 Березніченко З.О. з дисципліни «Системі курування електропрводом» на тему «Аналіз системи автоматичного керування для приводу підйому мостового крану вантажопідйомністю 20 т». Огляд існуючих систем, аналіз, моделювання системи та визначення показників якості системи керування привидом підйому мостового крана.
Курсова робота містить 34 сторінок друкованого тексту, 9 малюнків,
2 таблиці, 1 сторінок додатку.
АНАЛІЗ СИСТЕМІ, МОСТОВИЙ КРАН, ПРИВІД ПІДЙОМУ, СИСТЕМА КЕРУВАННЯ, ТИРИСТОРНИЙ РЕГУЛЯТОР ШВИДКІСТІ, ПОКАЗНИКИ ЯКОСТІ
 ЗМІСТ
ЗМІСТ
ВСТУП……………………………………………………………….…………… 5
1 ОПИС ТА ТЕХНІЧНІ ХАРАКТЕРИСТИКИ МОМТОВОГО КРАНА
НК1090А……………………………………………………………………….. 7
Загальні відомості…………………………………………………….. 7
Вимоги до обладнання ……………………………………………….. 8
Опис технологічного процесу підйому вантажу……………………. 9
Технічні характеристики мостового крану НК 1090 А………..........12
Кінематична схема приводу підйому………………………………..13
Опис роботи принципової електричної схеми крана……………….14
2 СТАТИЧНА МЕХАНІЧНА ХАРАКТЕРИСТИКА………………………….17 2.1 Природня механічна характеристика………………………………..17
2.2 Механічні характеристики привода з тиристорним регулятором швидкості………………………………………………………………….19
3 ФУНКЦІОНАЛЬНА ТА СТРУКТУРНА СХЕМИ ЕЛЕКТРОПРИВОДУ…21
3.1 Функціональна схема…………………………………………………21
3.2 Структурна схема……………………………………………………..24
4 ЕЛЕМЕНТИ ТА БЛОКИ СИСТЕМИ КЕРУВАННЯ
ЕЛЕКТРОПРИВОДОМ………………………………………………………..25
5 ВИЗНАЧЕННЯ ПОКАЗНИКІВ ЯКОСТІ СКЕП…………………………….30
5.1 Структурне моделювання в середовищі Matlab Simulink………….30
5.2 Електромеханічний перехідний процес та показники
якості системи…………………………………………………………….30
ВИСНОВКИ…………..…………………………………………………………33
ДОДАТОК……………………………………………………………………….34
ВСТУП
 Різноманітні
системи управління крановими механізмами
можуть бути класифіковані за призначенням,
способу управління, та умовам регулювання.
Різноманітні
системи управління крановими механізмами
можуть бути класифіковані за призначенням,
способу управління, та умовам регулювання.
За призначенням розрізняють системи управління механізмами підйому, механізмами пересування і обертання.
За способом управління бувають системи управління з силовими кулачковими контролерами, з кнопковими постами, з комплектними пристроями (наприклад, з магнітним контролером і перетворювачем енергії або без нього).
За умовами регулювання можуть бути системи управління: з регулюванням швидкості нижче номінальної, з регулюванням швидкості вище і нижче номінальної, з регулюванням прискорення і уповільнення.
У системах кранових електроприводів застосовують електродвигуни чотирьох видів:
Двигуни постійного струму з послідовним або незалежним збудженням з регулюванням швидкості, прискорення і уповільнення шляхом зміни підводиться до струму якоря і напругою збудження.
Асинхронні двигуни з фазним ротором з регулюванням вище і нижче зазначених параметрів шляхом зміни підводиться до обмотки ротора електродвигуна напруги, опору резисторів у ланцюзі обмотки ротора та застосування інших способів.
Асинхронні двигуни з короткозамкнутим ротором з постійною (при номінальній частоті мережі) або регульованою (при регулюванні вихідної частоти перетворювача) частотою обертання.
Асинхронні двигуни з короткозамкнутим ротором багатошвидкісні (полюсноперемикаємі).
 Система
управління з силовими кулачковими
контролерами - проста і найпоширеніша
для кранових електроприводів. Для
асинхронних електродвигунів з фазним
ротором контролери перемикають обмотки
статора і ступені резисторів у ланцюзі
обмотки ротора.
Система
управління з силовими кулачковими
контролерами - проста і найпоширеніша
для кранових електроприводів. Для
асинхронних електродвигунів з фазним
ротором контролери перемикають обмотки
статора і ступені резисторів у ланцюзі
обмотки ротора.
Основні недоліки систем електроприводів з кулачковими контролерами: низькі енергетичні показники, невисокий рівень зносостійкості контактної системи, недостатня плавність регулювання швидкості.
Саме для покрашення плавності регулювання швидкості, плавності пуску та збільшення діапазону регулювання, з мінімальними затратами на переобладнання системі керування можливо встановити тиристорний регулятор швидкості.
Регулятор швидкості тиристорний РСТ дросельного електроприводу призначений для забезпечення ступінчатого або плавного регулювання швидкості вала асинхронного електродвигуна з фазним ротором, у ланцюзі ротора якого включений пусковий дросель. Регулятор може бути використаний для оснащення механізмів підйому, моста, візки кранів, для механізмів металургійного та машинобудівельних виробництв, що вимагають зміни швидкісних режимів роботи обладнання.
При оптимізації застарілого обладнання регулятор спільно з пусковим дроселем призначений для заміни шаф з опорами для роторного ланцюга і контакторами, обслуговуючими їх перемикання. При такій заміні збільшується надійність роботи приводу і його міжремонтний термін експлуатації.
Тиристорний регулятор швидкості дозволяє в приводах отримувати діапазон регулювання швидкості D = (5... 10): 1 і забезпечує більш жорсткі електричні характеристики, ніж характеристики з активними опорами в роторному ланцюгу.
1 Опис та технічні характеристики момтового крану нк1090а
Загальні відомості
 Кранами
називаються вантажопідйомні пристрої,
що служать для вертикального і
горизонтального переміщення вантажів
на невеликі відстані.
Кранами
називаються вантажопідйомні пристрої,
що служать для вертикального і
горизонтального переміщення вантажів
на невеликі відстані.
За особливостями конструкції, пов'язаних з призначенням та умовами роботи, крани поділяються на мостові, портальні, козлові, баштові та ін. в цехах підприємств електромашинобудування найбільшого поширення набули мостові крани, за допомогою яких здійснюється підйом і опускання важких заготовок, деталей і вузлів машин, а також їх переміщення вздовж і поперек цеху. Вид мостового крана в основному визначається специфікою цеху або місця його розташування на підприємстві і його технологією, проте багато вузлів кранового устаткування, наприклад механізми підйому та пересування, виконуються однотипними для різних різновидів кранів.
Несуча конструкція крана являє собою міст з двома головними балками коробчатого перетину (або з гратчастими фермами), перемкнути через проліт цеху, і кінцевими балками, на яких встановлені ходові колеса. Колеса переміщаються по рейках підкранової колії, закріплених на балках опорних конструкцій у верхній частині цеху. Привід ходових коліс здійснюється від електродвигуну через редуктор і трансмісійний вал.
Уздовж моста прокладені рейки, по яких на колесах, що приводяться в рух електродвигуном через редуктор, переміщується візок з підйомною лебідкою. На барабан лебідки намотуються підйомні канати з підвішеним до них на блоках гаком,або іншим пристроєм, для захоплення вантажів. На барабан наводиться обертання електродвигуном через редуктор.
Механізми мостового крану забезпечують три рухи: підйом вантажу,
 переміщення
візка та переміщення мосту. Механізм
підйому являє собою лебідку, пов’язану
з подвоєним поліспастом; при
вантажопідйомності більше 10 т. крани
оснащуються двома самостійними
механізмами підйому головним та
допоміжним, вантажопідйомністю, що
дорівнює приблизно 0.25 основної, та
використовують для підйому малих
вантажів з більшою швидкістю.
переміщення
візка та переміщення мосту. Механізм
підйому являє собою лебідку, пов’язану
з подвоєним поліспастом; при
вантажопідйомності більше 10 т. крани
оснащуються двома самостійними
механізмами підйому головним та
допоміжним, вантажопідйомністю, що
дорівнює приблизно 0.25 основної, та
використовують для підйому малих
вантажів з більшою швидкістю.
Керування роботою механізмів крана проводиться з кабіни оператора-кранівника, в якій розташована пульт керування з командоконтролером. Електроапаратура управління приводами розміщується в шафах встановлених на мосту крана. Тут же розташовуються ящики резисторів, для проведення операцій обслуговування механізмів і електроустаткування.
Електроенергія до крана підводиться за допомогою ковзних струмознімачів від головних тролеїв покладених уздовж підкранової колії. Для підведення живлення до електроустаткування, розміщеного на візку служать допоміжні тролі що йдуть уздовж моста.
Залежно від виду вантажів, що транспортуються на мостових кранах використовують різні вантажозахоплювальні пристрої: гаки, магніти, мульди грейфери, кліщі тощо.
Найбільшого поширення набули крани з гаковою підвіскою або з підйомним електромагнітом, що служить для транспортування сталевих листів, скрапу, стружки та інших феромагнітних матеріалів.
Вимоги до обладнання
У відповідності з метою використання кран розташовується у металооброблюючему цеху. Використовується для транспортування деталей та заготовок між стадіями обробки, та для відважування виготовленої продукції. Відповідно до умов цеху крану доводиться працювати в запиленому середовищі, але без пагубних дій з боку зміни температурних режимів(кран знаходиться у приміщенні та не зазнає впливе погодних умов). Достатня ступень захисту ІР51.
У відповідності до можливостей та потреб цеху привода крану повинні працювати від змінної напруги 380 В з частотою 50 Гц.
 Технологічний
процес висуває певні умови до системи
керування. Так система керування повинна
забезпечувати робочі швидкості в прямому
та зворотному напрямках, можливість
плавного регулювання швидкості в низ
від номінальної, та забезпечення
стабільної роботи на понижених швидкостях.
Сиситема повинна забезпечити регулювання
швидкості в діапазоні від D=5:1
до D=10:1
в залежності від зміни навантаження.
Технологічний
процес висуває певні умови до системи
керування. Так система керування повинна
забезпечувати робочі швидкості в прямому
та зворотному напрямках, можливість
плавного регулювання швидкості в низ
від номінальної, та забезпечення
стабільної роботи на понижених швидкостях.
Сиситема повинна забезпечити регулювання
швидкості в діапазоні від D=5:1
до D=10:1
в залежності від зміни навантаження.
Електромеханічна система повинна забезпечувати стабільну роботу в діапазоні температур від мінус 50 до 65оС.
Опис технологічного процесу підйому вантажу
Технологічний процес роботи мостового крану має циклічний
характер. Цикл складається з підйому вантажу, переміщення, його опускання, підйому порожньої підвіски (без вантажу) та її опускання.
На рисунку 1 представлена діаграма робочих циклів приводу підйоу мостовим краном.
Де Мдин.Мах – максимальний динамічний момент, Мдин.Мах=1142 Нм;
Мст.Мах – максимальний статичний момент, Мст.Мах=557 Нм;
Мп.сп – середній момент в період пуску=758 Нм;
Ме – еквівалентний момент

 tц
– час виконання одного циклу.
tц
– час виконання одного циклу.


Рисунок 1 – Динамічна навантажувальна діаграма електродвигуну механізму підйому мостового крану
Уточнене значення тривалості вмикання


 Технологічний
процес підйому (опускання) вантажу
поділяється на декілька етапів:
Технологічний
процес підйому (опускання) вантажу
поділяється на декілька етапів:
1. Позіціювання механізму захоплення безпосередньо над вантажом або в відстані достатній для можливості ведення робіт стропольщіком по закріпленню вантажу. Цей етап також складається з декількох процессів: швидкий рух робочого органу до робочої зони строповщика, та повільний рух до необхідної позиції який постійно узгоджується з строповщіком.
2. Після закріплення вантажу відбувається процес підйому на невелику відстань. Це необхідно зробити для того, щоб відбувся вибір зазорів в рухливих елементах приводу та натягнення тросів. Тепер виникає необхідність перевірки надійності фіксаціі вантажу, з урахуванням змін що відбулися за рахунок розтягування кріпенних засобів пд. Дією сили ваги. За час перевірки вантаж повинен перейти до сталого режиму без коливань, або з незначними коливаннями.
3. Підйом вантажу з поступовим збільшенням швидкості до номінальної, або достатньої для виконання поставленої задачі.
При наближенні до досягнення необхідної висоти підйому необхідно поступово знизити швидкість для зниження коливань після останову.
Технічні характеристики мостового крану НК 1090 А
 Технічні
характеристики приводу підйому наведені
в таблиці 1.
Технічні
характеристики приводу підйому наведені
в таблиці 1.
Таблиця 1 – технічна характеристика мостового крану НК1090А
Характеристика |
Значення |
Головний підйом, т |
20 |
Висота підйому, м |
6 |
Кратність поліспасів |
2 |
Маси при статичних дослідженнях, т |
20 |
Маси при динамічних дослідженнях, т |
16 |
Швидкість механізму підйому, м/с |
0.125 |
Проліт крану, м |
10.5 |
База крану, м |
4.4 |
Ширина крану, м |
5.5 |
Навантаження на колесо крана, кН |
120 |
Маса візка, т |
3.7 |
Маса крану, т |
15.8 |
Місце керування |
кабіна |
Спосіб керування |
електричний |
Технічні характеристики двигуну наведені в таблиці 2.
 Таблиця
2 - Технічні данні та характеристики
електродвигуну приводу
Таблиця
2 - Технічні данні та характеристики
електродвигуну приводу
підйому
Характеристика |
значення |
Тип та умовне позначення |
4МТМ225М6У1 |
Рід струму |
змінний |
Напруга, В |
380 |
Напруга між кільцями ротору, В |
295 |
Номінальний струм статора, А |
80 |
Номінальний струм статора, А |
80 |
Частота, Гц |
50 |
Номінальна потужність, кВт |
37 |
Частота обертання, рад./с |
955 |
Максимальна частота обиртання |
2500 |
ККД,% |
87 |
cosφ |
0.81 |
Кількість |
1 |
Кінематична схема приводу підйому.
На рисунку 2 приведена кінематична схема механізму підйому мостового крану.
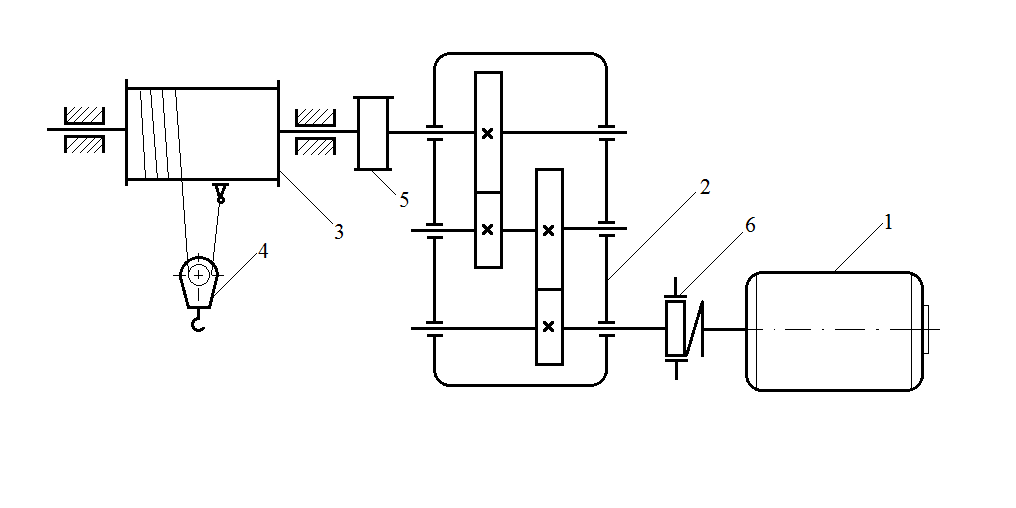
Рисунок 2 – Кінематична схема
1 – двигун;
2– редуктор;
3 – барабан ;
 4
– гакова підвіска;
4
– гакова підвіска;
5 – муфта;
6 – гальмівний шків.
1.5 Опис роботи принципової електричної схеми крана
Принципова схема наведена у додатку А.
Напруга ~ 380 В, 50 Гц , знімається з тролеїв за допомогою рухомих струмоприймачів ХА1 - ХА3, надходить на вступної автомат QF1 і на автомати SF1, SF4, що захищають ланцюга керування включенням автомата QF1, звуковий сигналізації і ланцюги чергового і підкранової освітлення. Для включення вступного автомата QF1 необхідно включити перемикач SA1 (ключ - марка). При цьому напруга надходить на котушку незалежного розчеплювача вступного автомата QF1, який після цього включається вручну. Напруга надходить на реле контролю фаз KV1, випрямляч А1 і на перетворювач напруги А2.
Реле KV1 не включається в наступних випадках:
1. При зниженні напруги в будь-який з фаз або у випадку обриву однієї з фаз і номінальному напрузі в інших фазах;
2. При подачі на реле напруги з зворотнім порядком чергування фаз.
 В
цьому випадку включається сигнальна
лампа HL1. Якщо
мережа справна - реле KV1 включається і
замикає контакт KV1. При цьому готується
ланцюг включення реле KV2 і KV3 і включається
сигнальна лампа HL2. Після
натискання на кнопку SB3 (якщо замкнуті
контакти кінцевих вимикачів SQ1, SQ2)
напруга надходить на котушки реле KV2 і
KV3. Контакти
реле KV2 (21-23) включають лінійний контактор
КМ1, а контакти реле KV3 (25-37), KV3 (47-49) подають
напругу в ланцюзі управління. При
цьому включається сигнальна лампа HL3.
Головні
контакти лінійного контактора КМ1
подають напругу на автомати QF2, QF4, QF6,
QF10 силових ланцюгів.
В
цьому випадку включається сигнальна
лампа HL1. Якщо
мережа справна - реле KV1 включається і
замикає контакт KV1. При цьому готується
ланцюг включення реле KV2 і KV3 і включається
сигнальна лампа HL2. Після
натискання на кнопку SB3 (якщо замкнуті
контакти кінцевих вимикачів SQ1, SQ2)
напруга надходить на котушки реле KV2 і
KV3. Контакти
реле KV2 (21-23) включають лінійний контактор
КМ1, а контакти реле KV3 (25-37), KV3 (47-49) подають
напругу в ланцюзі управління. При
цьому включається сигнальна лампа HL3.
Головні
контакти лінійного контактора КМ1
подають напругу на автомати QF2, QF4, QF6,
QF10 силових ланцюгів.
Крім того, напруга надходить на кондиціонер К, автомати SF7 і SF8 живлення випрямляча 1V, 2V та живлення ланцюгів освітлення і обігріву кабіни.
Електрична схема керування приводом механізму підйому мульди забезпечує пуск, ступінчасте регулювання швидкості, реверс і гальмування електродвигуна з фазним ротором М1. Керування здійснюється командоконтролерів BL1, які мають по три фіксованих положення на підйом і опускання. Контактори КМ2 і КМ3 підключають обмотки статора електродвигуна М1 до мережі і забезпечують реверс. Дросель L1 включений постійно в роторну ланцюг електродвигуна М1 і обмежує струм ротора, а отже, і струм статора в пуско-гальмівних режимах. Другі кінці дроселя L1
підключені до тиристорних регуляторів швидкості В1, в якому встановлений вузол силових тиристорів, призначений для регулювання струму роторної ланцюга. При закритих тиристорах розімкнуті кінці обмоток дроселя 1Р4, 1Р5, 1Р6, струм в роторному ланцюгу не протікає. При включенні тиристорів з'єднуються кінці обмоток дроселя L1, збирається схема зірки, в ланцюзі ротора протікає струм. Величина струму ротора, а отже і швидкість, регулюються східчасто контактами реле 5KV, 8KV, 9KV в ланцюгах регулятора В1.
 Гальмування
приводу починається відразу після
установки командоконтролерів BL1 в
нульове положення. Гальмування
здійснюється електрогідравлічними
штовхачами М6, М6А. Схема
забезпечує нульовий (реле KV4), максимальний
(автомат QF2) і кінцевий (вимикачі SQ3, SQ3А,
SQ4) захист. Передбачено захист механізму
підйому мульди від перевищення маси
вантажу, що піднімається, здійснювана
обмежувачем вантажопідйомності ПЗК-10.
У
ланцюзі контактора підйому КМ2 встановлений
контакт обмежувача вантажопідйомність
ОГП1. Час
напрацювання механізму підйому мульди
контролюється обмежувачем вантажопідйомності
ПЗК-10 за допомогою включення контактів
контакторів КМ2 або КМ3. Схемою
передбачена сигналізація розгальмованої
стану приводу - сигнальна лампа HL4.
Гальмування
приводу починається відразу після
установки командоконтролерів BL1 в
нульове положення. Гальмування
здійснюється електрогідравлічними
штовхачами М6, М6А. Схема
забезпечує нульовий (реле KV4), максимальний
(автомат QF2) і кінцевий (вимикачі SQ3, SQ3А,
SQ4) захист. Передбачено захист механізму
підйому мульди від перевищення маси
вантажу, що піднімається, здійснювана
обмежувачем вантажопідйомності ПЗК-10.
У
ланцюзі контактора підйому КМ2 встановлений
контакт обмежувача вантажопідйомність
ОГП1. Час
напрацювання механізму підйому мульди
контролюється обмежувачем вантажопідйомності
ПЗК-10 за допомогою включення контактів
контакторів КМ2 або КМ3. Схемою
передбачена сигналізація розгальмованої
стану приводу - сигнальна лампа HL4.