

Управляюча програма-інтерпретатор urcp
Управляюча програма-інтерпретатор URCP призначена для програмування рухів ПР "Электроника НЦ ТМ-01" за допомогою кодів команд, які не потребують глибоких знань будови та роботи системи керування. Вказані коди будемо називати командами верхнього рівня.
Програма URCP написана па мові асемблера та розміщена у модулі ППЗП блоку керування IIP "Электроника НЦ ТМ-01".
Подібно до інтерпретатора алгоритмічної мови BASIC, програма інтерпретатор URCP зчитує команди керування роботом, оброблює та виконує їх покадрово. Формати кадрів та управляючих кодів представлені на рис. 2.3. Безперервна послідовність кадрів, яка завершується кодом "Кінець роботи", являє собою цикл роботи ПР.
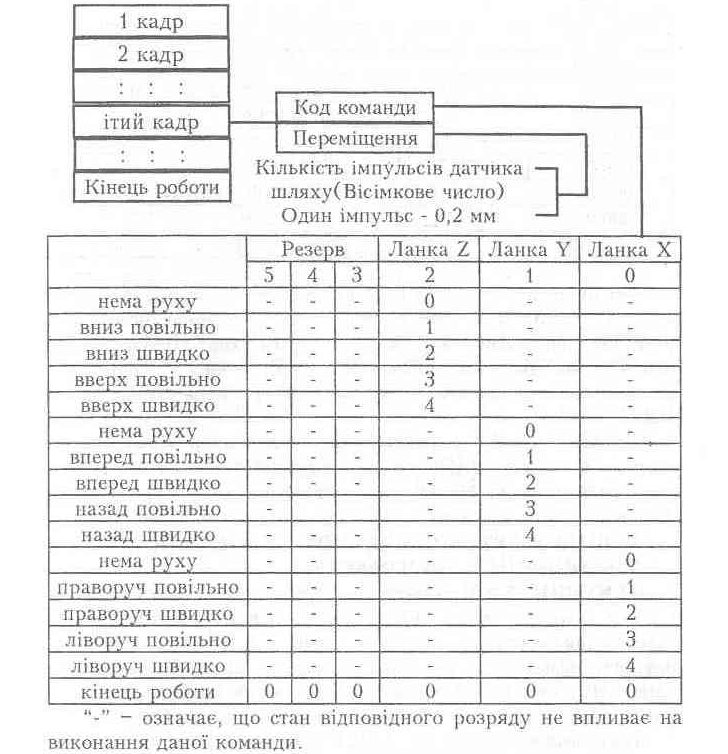
Рис. 2.3. Формати кадрів та управляючих кодів.
Виконання роботи
Завдання на лабораторну роботу – переміщення схвату робота за заданою траєкторією 1-2-3-4-5-6-1(рис.2.4).
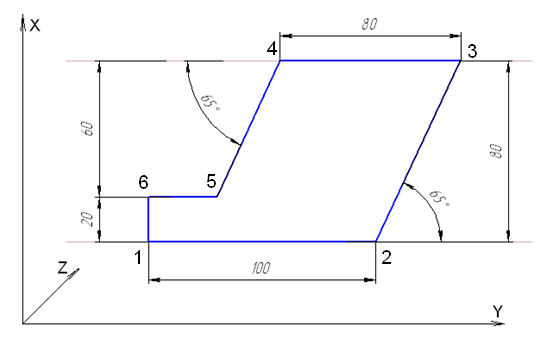
Рис.2.4.Завдання для переміщення схвату
Для визначення всіх переміщень знайду величини невідомих відстаней:
2-3(Y)=80*ctg(65)= 38.095≈38
4-5(Y)=60*ctg(65)=28.037≈28
6-5=(100+38)-(80+28)=30
Отримаю траєкторію переміщення з відомими відстанями за віссю X та Y (рис.2.5).
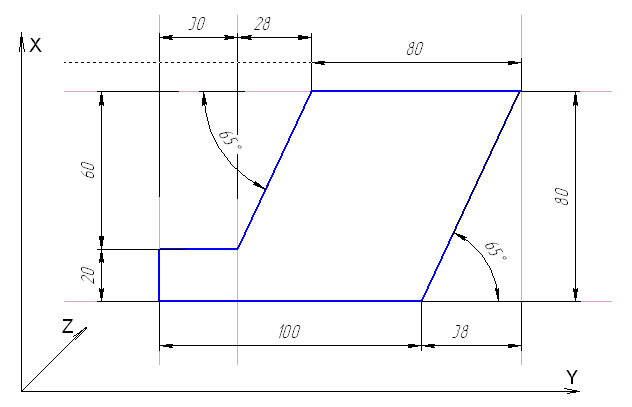
Рис.2.5
Для програмування робота необхідно використовувати значення імпульсів (один імпульс дорівнює переміщенню в 0.2) в вісімковій системі, для цього реальні значення помножимо на 5 та переведемо у вісімкову систему числення. Дані представлю у вигляді таблиці 1.
Таблиця 1.
-
Переміщення
Величина переміщення, см
Кількість імпульсів
Вісімкова форма числа
X
Y
X
Y
X
Y
1-2
0
100
0
500
0
764
2-3
80
38
400
190
620
276
3-4
0
80
0
400
0
620
4-5
60
28
300
140
454
216
5-6
0
30
0
150
0
226
6-1
20
0
100
0
144
0
Запишу програму для автоматичного режиму роботи робота за форматом кадрів та управляючих кодів представлених на рис.2.3 . Всі рухи робота обираю повільними.
000010
000764
000011
000620
000276
000030
000620
000033
000454
000216
000030
000226
000003
000144
Для роботи з емулятором пульту ручного керування на клавіатурі набраю 42120G, натискаю клавішу «А» починається автоматичний режим, виконується програма, схват робота описує задану траєкторію та повертається в початкову точку.
Висновок: на даній лабораторній роботі я ознайомився із загальною будовою, технічними характеристиками та роботою робота «Электроника НЦ ТМ-01» у режимі ручного керування та автоматичному під керуванням програми. Запрограмував робота для руху за заданою траекторією та за допомогою емулятора пульту ручного керування здійснив рух робота в автоматичному режимі.