

Технические средства замкнутых схем управления электропривода
Силовая часть замкнутых схем ЭП строится, как правило, на основе системы «преобразователь — двигатель», в которой основным управляющим воздействием на двигатель является напряжение для ДПТ и частота и напряжение для АД и СД. В предыдущих главах были рассмотрены основные виды силовых преобразователей- управляемые выпрямители и импульсные регуляторы напряжения для ЭП с ДПТ, инверторы, преобразователи частоты и регуляторы напряжения для ЭП с двигателями переменного тока. Наибольшее распространение в ЭП получили полупроводниковые (тиристорные) преобразователи, отличающиеся целым рядом достоинств.
Еще одним характерным признаком замкнутых является использование в них главным образом бесконтактных элементов и устройств, в первую очередь полупроводниковых. Релейно-контакторная аппаратура применяется в них для целей коммутации питающего напряжения, защит, блокировок и сигнализации.
Для выработки законов управления двигателем, который реализуется силовым преобразователем, замкнутые схемы ЭП содержат определенный набор управляющих элементов. В их состав входят; задающие (программные) устройства, определяющие уровень и характер изменения регулируемой координаты; датчики регулируемых координат и технологических параметров, дающие информацию о ходе технологического процесса и работе самого ЭП; регуляторы и функциональные преобразователи, вырабатываютцие управляющее воздействие на основании сигналов задающих устройств и датчиков координат и параметров; согласующие элементы, позволяющие соединить в единую схему все указанные элементы за счет согласования их входных и выходных сигналов по роду тока, уровням и виду сигналов и т. д.
Техническая реализация управляющих устройств современного ЭП весьма разнообразна. Они различаются по своей элементной базе, роду тока, мощности, конструктивному исполнению и многим другим признакам. Одним из основных признаков подразделения устройств управления является характер преобразования, сигналов, по которому они делятся на аналоговые и дискретные.
Для аналоговых устройств характерна функциональная (линейная и нелинейная) зависимость между входным и выходным сигналами, при этом выходной сигнал может принимать любые * значения. Примерами силовых аналоговых устройств могут служить управляемые выпрямители и преобразователи частоты, у которых напряжение и частота на выходе могут регулироваться .в широких пределах в зависимости от уровня входного сигнала управления.
Дискретный элемент может иметь только два уровня выходного сигнала—нулевой и максимальный, который появляется или исчезает при достижении входным сигналом определенного значения. Примерами дискретных элементов могут служить реле и бесконтактные логические элементы. На основе дискретных элементов создаются цифровые схемы управления ЭП.Каждый из названных видов силовых и управляющих устройств находит свою область применения в автоматизированном ЭП. Во многих случаях большой технический и экономический эффект, получается при применении в одном ЭП тех и других элементов, что позволяет в наилучшей степени использовать их достоинства.
До относительно недавнего времени задающие, регулирующие, согласующие и функциональные устройства, а также датчики координат ЭП выпускались отдельными сериями, «россыпью», что затрудняло проектирование схем управления, их наладку и эксплуатацию. Прогрессивным явлением в создании технических средств управления стала разработка унифицированной блочной системы регулирования (УБСР). Использование этой системы обеспечивает широкую унификацию производства комплектных средств управления, упрощает проектирование, наладку и эксплуатацию ЭП, улучшает технико-экономические показатели их работы.
Система УБСР имеет несколько ветвей - аналоговую, выполняемую на обычных элементах электроники (УБСР-А) и на интегральных микросхемах (УБСР-АИ), и дискретную (цифровую) на обычных элементах (УБСР-Д) и микросхемах (УБСР-ДИ).
Замкнутая схема управления асинхронного электропривода, выполненного по системе «тиристорный регулятор напряжения - двигатель» (ТРН — АД).
Рассмотрим схему регулирования скорости АД с контактными кольцами с использованием обратной связи по его скорости (рис. 11.30,а). Между сетью и статором АД включены три пары встречно - параллельно соединенных тиристоров VS1 — VS6, образующих силовую часть ТРН. Управляющие электроды тиристоров подсоединены к выходам СИФУ, которая распределяет управляющие импульсы на все тиристоры и осуществляет их сдвиг в зависимости от сигнала управления Uy. К валу
АД подсоединен тахогенератор ТГ. Его ЭДС Етг сравнивается с задающим напряжением Uз.с снима- емым с задающего потенциометра скорости ЗП, причем эти напряжения включены навстречу Друг другу. При увеличении этого сигнала угол управления тиристорами, а уменьшается, подаваемое на АД напряжение увеличивается и наоборот. В цепь ротора АД постоянно включен добавочный резистор R2д, наличие которого позволяет расширить диапазон регулирования скорости и облегчить тепловой режим АД при его работе на пониженных скоростях, когда в цепи ротора выделяются большие потери, мощности.
Рассмотрим работу ЭП при изменении момента нагрузки Мс на валу АД и постоянном задании скорости сигналом U3с2 Допустим также, что в исходном положении АД работал в точке 1 при моменте нагрузки Мс1 (см. рис. 11.30,6), а затем произошло его увеличение до значения Мс2.
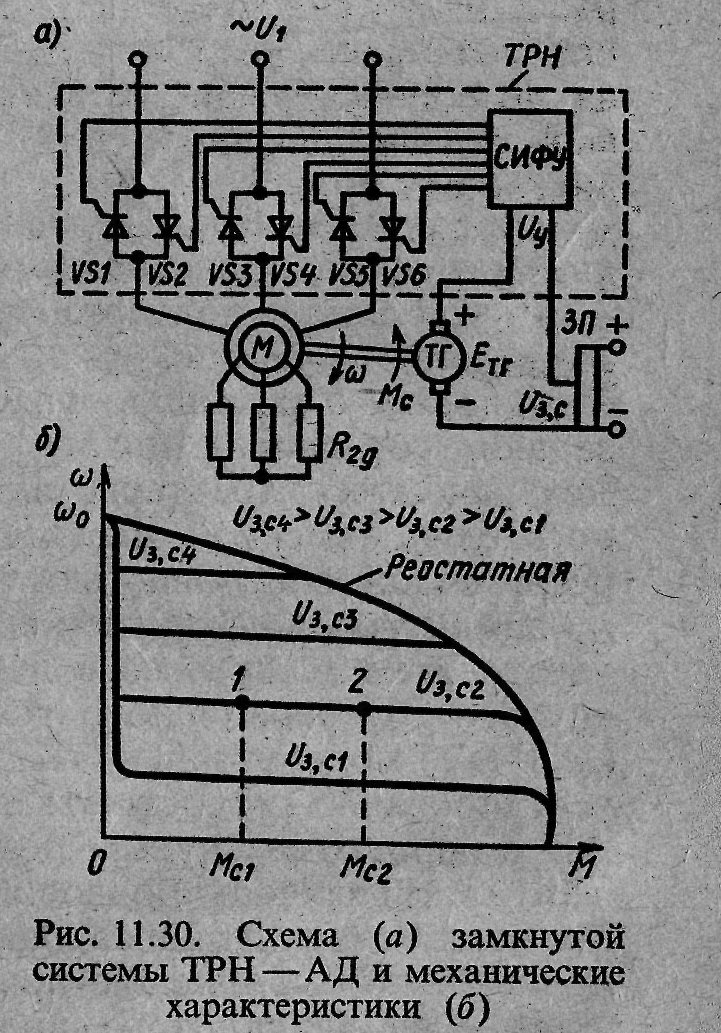
При увеличении нагрузки на валу АД его скорость начнет снижаться, соответственно начнет уменьшаться и ЭДС тахогенератора ЕТГ. Уменьшение ЕТГ вызывает согласно (11.15) увеличение напряжения управления Uу, что приведет к уменьшению угла ос и увеличению тем самым подаваемого на АД напряжения. Момент АД будет увеличиваться и в точке 2 сравняется. Таким образом, увеличение момента нагрузки привело к небольшому снижению скорости АД, т. е. друг его характеристики в схеме рис. 11.30, а стали жесткими.
При уменьшении момента нагрузки Мс будет автоматически происходить снижение напряжения на АД и тем самым поддержание его скорости вращения на заданном уровне.
Изменяя с помощью потенциометра ЗП значение задающего напряжения U3C, можно получить ряд механических характеристик электропривода с относительно высокой жесткостью и необходимой перегрузочной способностью АД.