

Типовые узлы и схемы управления электроприводов с асинхронными двигателями
Типовые схемы релейно-контакторного управления АД строятся по тем же принципам, что и ДПТ. Типовые схемы управления асинхронным двигателем с короткозамкнутым ротором. Двигатели этого типа малой и средней мощности обычно пускаются прямым подключением к сети без ограничения пусковых токов. В этих случаях они управляются с помощью магнитных пускателей, которые одновременно обеспечивают и некоторые виды их защиты.
Схема управления асинхронным двигателем с использовалием магнитного пускателя (рис. 10.31) включает в себя магнитный пускатель, состоящий из контактора КМ и двух встроенных в него тепловых реле защиты КК.
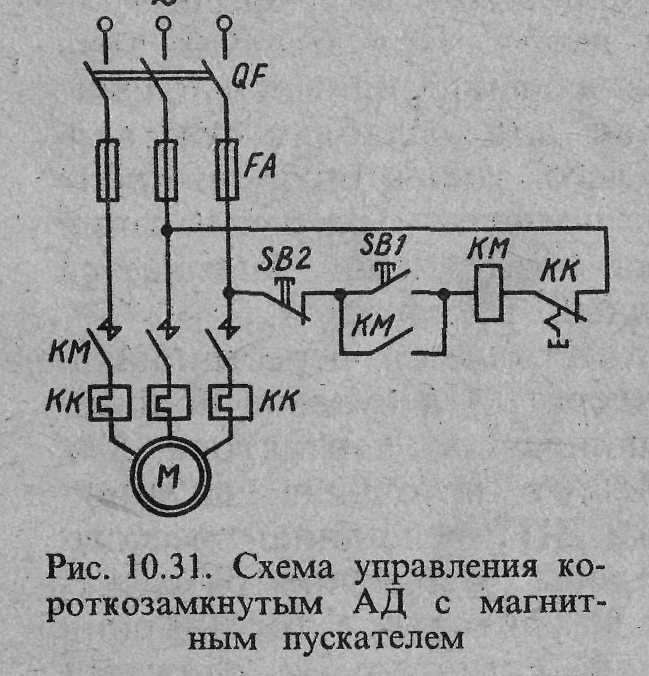
Схема обеспечивает прямой (без ограничения тока и момента) пуск АД, отключение его от сети, а также защиту от коротких замыканий (предохранители FA) и перегрузки (тепловые реле КК). Для пуска АД замыкают выключатель QF и нажимают кнопку пуска SB1. Получает питание контактор КМ, который своими главными силовыми контактами в цепи статора АД подключает его к источнику питания, а вспомогательным контактом шунтирует кнопку SB1. Происходит разбег АД по его естественной характеристике. Для отключения АД нажимается кнопка остановки SB2, контактор КМ теряет питание и отключает АД от сети. Начинается процесс торможения АД выбегом под действием момента нагрузки на его валу.
Замкнутые схемы управления электропривода
Замкнутые структуры ЭП применяются в тех случаях, когда требуется обеспечить движение исполнительных органов рабочих машин с высокими показателями — большими диапазоном регулирования скорости и точностью, ее поддержания, заданными качеством переходных процессов и точностью остановки, а также высокой экономичностью или оптимальным (наилучшим) функционированием технологического оборудования и самого ЭП. Основным признаком замкнутых структур является такое автоматическое (без участия человека) управление ЭП, при котором ЭП наилучшим образом выполняет свои функции при всевозможных управляющих и внешних возмущениях, действующих на рабочую машину или ЭП.
Схемы замкнутых структур электропривода
Замкнутые структуры ЭП строятся по принципам компенсации возмущения и отклонения, называемому также принципом обратной связи. Рассмотрим принцип компенсации наиболее характерного внешнего возмущения ЭП, момента нагрузки Мс, при регулировании скорости ω.
Основным признаком замкнутой структуры ЭП является наличие цепи, по которой на вход ЭП (рис. 11.1, а) вместе с задающим сигналом скорости UЗ.с подается сигнал
Uм = kMMc, пропорциональный моменту нагрузки Мс. В результате этого управление ЭП осуществляется суммарным сигналом UΔ, который автоматически изменяется в нужную сторону при колебаниях момента нагрузки, обеспечивая с помощью системы управления поддержание скорости ЭП на заданном уровне.
Несмотря на свою эффективность, ЭП по схеме рис. 11.1, а выполняются редко из-за отсутствия простых и надежных датчиков момента нагрузки Мс (возмущающего воздействия).
В связи с таким положением подавляющее большинство замкнутых структур электропривода строятся по принципу отклонения (обратной связи). Он характеризуется наличием цепи обратной связи, соединяющей выход ЭП с его входом, откуда и пошло название замкнутых схем. Применительно к рассматриваемому примеру регулирования скорости
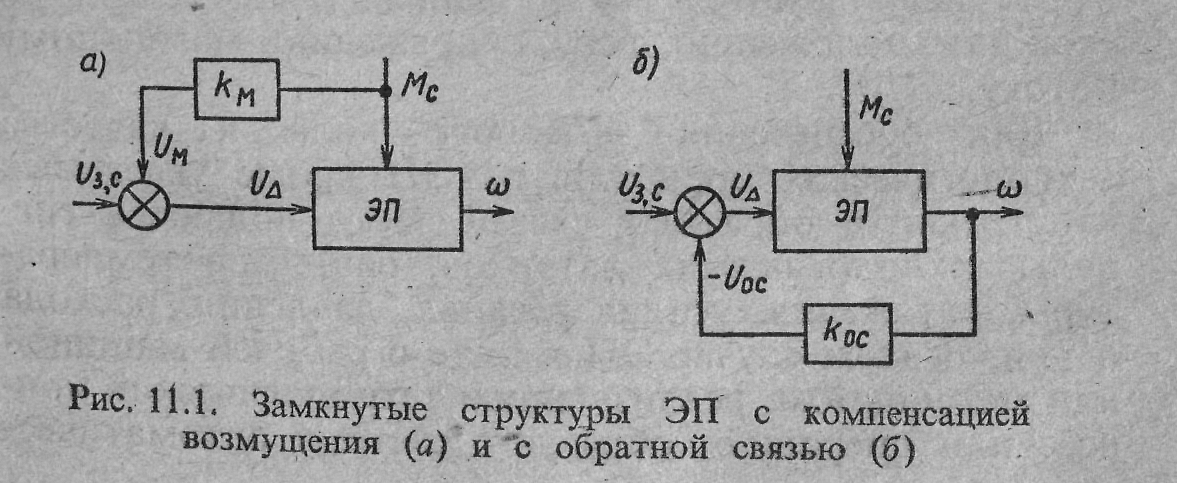
признаком этой структуры является цепь обратной связи (рис. 11.1,6), по которой информация о текущем значении скорости (сигнал обратной связи Uос=Kосω подается на вход ЭП, где он вычитается из сигнала задания скорости Uзс. Управление ЭП осуществляется сигналом отклонения UΔ=U3.C — UO,C (его также называют сигналом рассогласования или ошибки). Этот сигнал при отличии скорости от заданного уровня автоматически изменяется необходимым образом и устраняет с помощью системы управления ЭП эти отклонения. Тем самым управление движением осуществляется с учетом его результата.
Все виды применяемых в замкнутом ЭП обратных связей делятся на положительные и отрицательные, линейные и нелинейные, жесткие и гибкие. Положительной называется такая обратная связь, сигнал которой направлен согласно (складывается) с задающим сигналом, в то время как сигнал отрицательной связи направлен ему встречно (знак «минус» на рис. 11.1).
Жесткая обратная связь характеризуется тем, что она действует как в установившемся, так и в переходном режимах ЭП. Сигнал гибкой обратной связи вырабатывается только в переходных режимах ЭП и служит для обеспечения требуемого их качества, например устойчивости движения, допустимого перерегулирования и т. д.
Линейная обратная связь характеризуется пропорциональной зависимостью между регулируемой координатой и сигналом обратной связи U0-e, в то время как при реализации нелинейной связи эта зависимость нелинейна.
В зависимости от вида регулируемой координаты в ЭП используются все названные выше связи по скорости, положению, току, напряжению, магнитному потоку, ЭДС.
Для обеспечения заданного хода и качества технологических процессов на ЭП кроме указанных «внутренних» обратных связей часто подаются сигналы технологических датчиков, например температуры, натяжения, усилия резания, давления, расхода и т. д. В этом случае ЭП вместе с рабочей машиной или механизмом, реализующим технологический процесс или операцию, образуют систему автоматического регулирования (рис. 11.2).
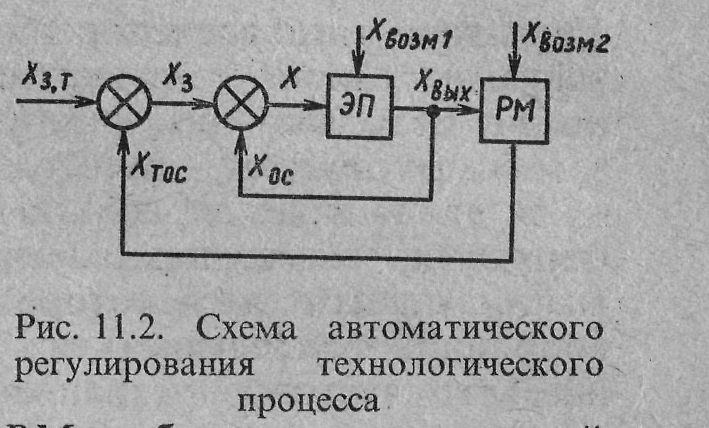
В этой системе ЭП является силовым регулирующим устройством, выходная координата которого ХВЬ1Х (например, скорость) является управляющим воздействием для рабочей машины РМ и обеспечивает заданный ход технологического процесса при изменениях как его сигнала задания Хзт, так и возмущающего воздействия Хвозм2- Сигналом задания для ЭП в этом случае является сигнал отклонения (рассогласования) между сигналами задания Хзт технологического параметра и технологической обратной связи Хтос. Отметим, что сигналов технологических обратных связей может быть несколько, а для выработки задающего сигнала для ЭП используются ЭВМ или микропроцессоры. Как уже отмечалось, для управления движением исполнительного органа иногда требуется регулировать несколько координат ЭП, например тока (момента) и скорости. В этом случае замкнутые ЭП выполняются по одной из следующих структурных схем.