

2.5 Математическое описание сар и выбор автоматического управляющего устройства (ауу)
2.5.1 Описание математической модели объекта – статистические характеристики, кривая разгона, частотная характеристика.
Построение кривой разгона.
Кривой разгона ОР называется кривая изменения во времени выходной величины в переходном процессе вызванным однократным изменением выходной величины (кривая разгона взята на основании теоретических данных из технической литературы 1). Динамические параметры объекта определяются по кривой разгона которая дана в данных из литературы 2, взятых на ОАО «Северсталь». Для определения динамических параметров необходимо провести касательную к точке перегиба на кривой разгона, после этого проводим необходимые перпендикуляры и найдем :
τоб = 60 с
Tоб = 230 с
Kоб = 1,4 C/% хода РО

Рисунок11 – Кривая разгона
2.5.2 Определение передаточных функций измерительно- преобразовательных и исполнительных устройств
Объект управления на структурной схеме САУ представляется виде соединения двух звеньев:
Апериодического и звена чистого запаздывания рисунок 12

Рис. 12 - Структурная схема объекта управления
Автоматический регулятор на структурной схеме САУ представляется в виде соединения трех звеньев рисунок 13.
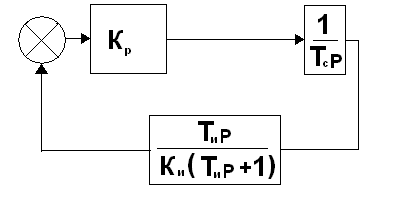
Рис. 13 - Структурная схема автоматического регулятора
Система автоматического управления представляет собой совокупность объекта управления и автоматического регулятора определенным образом взаимодействующих друг с другом.
Структурная схема САУ изображена на рисунке 14.

Рисунок 14 - Структурная схема САУ
Структурная схема САУ с числовыми значениями изображена на рисунке 15.

Рис. 15 - Структурная схема САУ
Передаточная функция имеет следующий вид
 (1)
(1)
![]()
То=230 с
Тс=1 с
Коб=1,9( оС /%хода РО)
![]() =60
с
=60
с
Ти=138 с
Кр=1,92(% хода ИМ/ оС)
Подставим числа
![]() (2)
(2)
![]()
Передаточная функция замкнутая системы имеет вид
![]()
 (3)
(3)

Подставим значения
То=230 с
Тс=1 с
Коб=1,9( оС /%хода РО)
=60 с
Ти=138 с
Кр=1,92(% хода ИМ/ оС)
![]()
2.5.3 Выбор закона автоматического управления в общем виде.
Динамические параметры объекта регулирования
Ко = 1,9 °С/ % хода РО
 То=
230 с
То=
230 с
tз = 60 с
Технологические требования:
Yв = 18%,
Хд = 30 °С
Хст < 10 °C
tрег = 900 c
Находим обратную величину относительно времени запаздывания
1/zо= tз/То; 60/230; 0,26 (4)
Находим относительное время регулирования
tрег/tз =900/60=15 (5)
Находим допустимый динамический коэффициент регулирования
Rd = Хд/(Ко* Yв); Rd = 30/(1,9*18) = 0,9 (6)
Находим допустимое остаточное отклонение регулируемой величины
(уост)доп = Хст/(Ко* Yв) ; (уост)доп =10/(1,9*18) = 0,29 = 29% (7)
В Автоматизированных системах используется один из трёх типовых процессов регулирования
- апериодический
- с 20% перерегулированием
- С min квадратичной ошибкой.
В данной САР выбираем апериодический процесс регулирования, т.к система, не должна допускать колебаний в замкнутой системе регулирования. величина времени регулирования должна быть минимальной.
По значению tз /To выбираем тип регулятора. Значению tз /To = 0.26 соответсвует непрерывный тип регулятора.
Пользуясь графиком зависимости Rd от tз /To (рисунок 16) при выбранном оптимальном процессе, определяем , что при Rd = 0,9 при 1/zo = 0,26 могут обеспечить все регуляторы – П, ПИ, ПИД.


– И-регулятор; 2 – П-регулятор; 3 – ПИ-регулятор; 4 – ПИД-регулятор
Рисунок 16 – Динамические коэффициенты регулирования на статических объектах.
Выбираем П – регулятор
По графику зависимости уост = f(zo) (рисунок 17) определим остаточное отклонение при установке П – регулятора.
 уост
= 0,5
уост
= 0,5

Рисунок 17 – Остаточное отклонение на статических объектах
По представленному графику находим, что уост = 0,5
Найдём величину остаточного отклонения возникающие при применении П регулятора.
Хст = Уост * К об * Ув (8)
Хст = 0,5 * 1,9 * 18
Хст = 17,1 °C
Так как допустимое значение Хст < 10 °С, то П – регулятор не может быть применён.
Выбираем ПИ регулятор
Определим каким будет время регулирования при применение ПИ регулятора. Оно должно быть меньше (tрег)доп. (tрег)доп = 900 с.
Для определения tp воспользуемся графиком зависимости tрег / t = f( tз/ t) для апериодического процесса. ( рисунок 18)

Рисунок18 – Относительное время регулирования на статических объектах.
tрег = tрег /t* t (9)
tрег = 8*60 = 480 с
т.к tрег > t(рег)доп то данный процесс может быть реализован с помощью ПИ регулятора. Значит выбираем ПИ - регулятор.
Определим по следующим формулам необходимые настройки регулятора.
Коэффициент усиления регулятора найдём по формуле.
Кp = 0,95/(К об*( tз /To)) (10)
Кp = 0,95/(1,9*0,26)
Kp = 1,92 % ИМ/ С
Время удвоения найдём по формуле
Tи = 0,6*Tо (11)
Tи = 138 c