

1.1.2. Замкнутые системы автоматического регулирования
В замкнутой системе автоматического регулирования выходная величина объекта является регулируемой величиной, она непрерывно измеряется и сравнивается с заданным значением для определения отклонения от задания. Это отклонение является входной величиной автоматического регулятора. В зависимости от состояния системы — величины и знака отклонения — регулятор вырабатывает по определенному
8
закону необходимое регулирующее воздействие. Для объектов регулирования с разными свойствами и требованиями к качеству
регулирования используют регуляторы с различными, более простыми или более сложными законами регулирования. Практически регулятор вводит регулирующее воздействие, изменяя положение регулирующего органа на входе объекта, непосредственно или с помощью исполнительного механизма.
На рис. 1.6 приведен пример замкнутой системы регулирования. В рабочее пространство мартеновской печи поступают газ и воздух для горения. Образующиеся продукты сгорания удаляются из рабочего пространства за счет тяги дымовой трубы или дымососа. Давление в рабочем пространстве печи — одна из выходных величин объекта регулирования; она
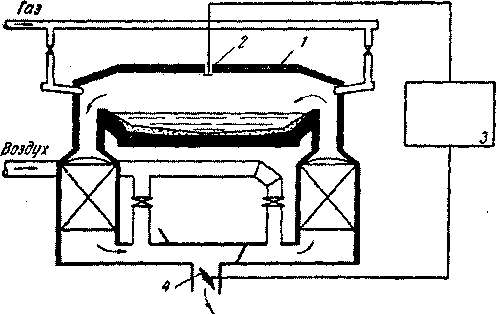
Продукта сгорания
Рис. 1.6. Система автоматического регулирования давления в рабочем пространстве марте- новской печи (пример): 1 – рабочее про- странство печи; 2 – измерение давления; 3 – регулятор; 4 – регулирующий шибер изменения тяги
характеризует гидравлический режим печи. При всяком нарушении равновесия, т. е. равенства между количествами газа и воздуха, поступающих в печь, и количеством удаляемых из печи продуктов сгорания, регулируемая величина (давление) изменяется, отклоняется от требуемого значения. Колебания давления газа или воздуха, изменение их
9
подачи, выделение СО из ванны печи, случайные изменения положения регулирующих органов и др., словом, все, что может нарушить равновесие, — это возмущающие воздействия. Регулирующим воздействием служит тяга, изменяя которую всегда можно восстановить равновесие, установить нужное давление в рабочем пространстве печи.
Физическая природа регулируемой величины, устройство и назначение объекта регулирования, конструкция регулятора могут быть различными. Однако структура замкнутой системы автоматического регулирования, назначение ее элементов всегда однотипны.
Структура и классификация. В общем случае замкнутая система автоматического регулирования состоит (рис. 1.7) из объекта регулирования и автоматического регулятора. В регулятор входят:
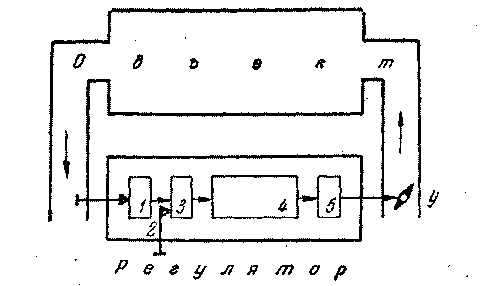
Рис. 1.7. Замкнутая система регулирования объект—регулятор: 1 – измерительное устройство; 2 – задающее устройство; 3 – устройство сравнения; 4 – управля- ющее устройство; 5 – исполнительный механизм
измерительное и задающее устройства; устройство сравнения действительного и заданного значений регулируемой величины, определяющее отклонение от задания; управляющее устройство вычисляющее по величине отклонения регулирующее воздействие; исполнительный механизм, изменяющий положение регулирующего органа объекта. В конкретных случаях отдельные элементы регулятора могут быть объединены или могут вовсе отсутствовать. Так, во многих автоматических электронных потенциометрах, используемых
10
в схемах регулирования, измерительное, задающее и сравнивающее устройства совмещены, в системах с регуляторами непосредственного действия нет исполнительных механизмов и т. п.
Все элементы системы регулирования образуют последовательную замкнутую цепь: выходная величина предшествующего элемента служит входной величиной последующего.
Многие элементы системы обладают лишь однонаправленным действием: они воздействуют лишь на последующий элемент системы. Например, регулируемая величина воздействует на измерительное устройство регулятора; воздействие же измерительного устройства на регулируемую величину всегда ничтожно.
Автоматический регулятор быстро (практически мгновенно) реагирует на отклонение, запоминает, вычисляет и осуществляет необходимые меры управления сколь угодно долго. Однако обычный регулятор во всех случаях действует по одному закону регулирования и в новых условиях не может выйти за пределы установленного режима, учитывать дополнительную информацию, выбирать новое оптимальное задание.
Рассмотренная система автоматического регулирования предназначена для поддержания постоянного значения регулируемой величины. Это система, собственно, регулирования, или система стабилизации.
Системы автоматического регулирования, изменяющие регулируемую величину по определенному закону, являющемуся функцией времени, называют системами программного регулирования.
Системы автоматического регулирования, изменяющие регулируемую величину по произвольному закону в зависимости от какой-либо другой величины, называют зависимыми (или следящими) системами регулирования.
Системы автоматического регулирования, способные обеспечить наилучший в том или ином смысле процесс регулирования, называют оптимальными системами; на практике оптимальными системами обычно называют системы, обеспечивающие минимальное время процесса регулирования, т. е. максимальное быстродействие.
Системы, осуществляющие автоматическое регулирование нескольких величин, делят на системы несвязанного и связанного регулирования.
В систем е несвязанного регулирования регуляторы различных
11
величин не связаны друг с другом и взаимодействуют лишь через общий объект регулирования. Такие системы могут быть зависимыми, если изменение одной из регулируемых величин вызывает изменение других, или независимыми,
Системой связанного регулирования называют такую систему, в которой регуляторы различных регулируемых величин имеют взаимные связи, обеспечивающие взаимодействие регуляторов вне объекта.