

1.5.2. Показатели качества регулирования
Вид переходного процесса при регулировании, т.е. характер возвращения регулируемой величины к заданному значению после некоторого возмущения, определяет качество регулирования. Основные показатели качества переходного процесса при регулировании, особо важные с точки зрения технологии, рассматриваются ниже.
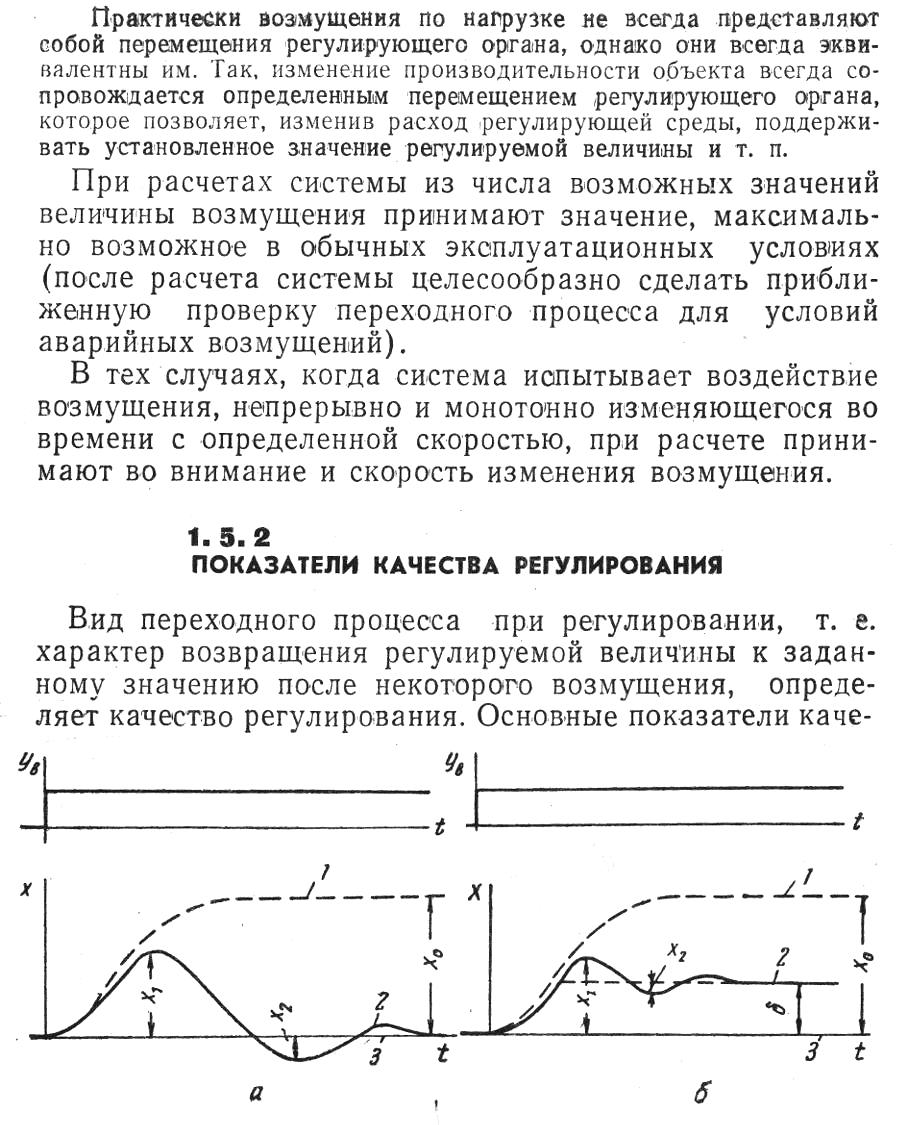
Рис. 1.32. Переходные процессы регулирования и качество
регулирования (отклонение регулируемой величины):
а – процесс без остаточного отклонения; б – процесс
с остаточным
отклонением:
![]() - максимальное дина-
- максимальное дина-
мическое
отклонение;
![]() - перерегулирование;
- перерегулирование;
![]() -
-
остаточное отклонение
На рис. 1.32 показаны два характерных переходных процесса при регулировании. В первом из них регулируемая величина в конце процесса регулирования полностью возвращается к заданному значению. В ходе второго процесса новое установившееся значение регулируемой величины отличается от заданного значения: в конце процесса имеет место остаточное отклонение регулируемой величины от задания, равное δ.
Условием полного возвращения регулируемой величины к заданному значению после возмущения является интегральное (астатическое) воздействие в законе регулирования регулятора. Поэтому, если необходимо, чтобы остаточное отклонение при любых возмущениях было равно нулю, нельзя пользоваться регулятором чисто пропорционального действия.
Величина отклонения δ определяется нагрузкой объекта, при
66
которой наступило новое установившееся состояние, - ее отклонением от номинальной, динамическим характеристиками объекта и настройкой регулятора.
Важнейшим показателем качества является максимальное динамическое отклонение регулируемой величины от задания х в ходе процесса регулирования (см. рис. 1.32). Это отклонение называется динамическим, поскольку оно носит временный, переходный характер. Наибольшим отклонением в устойчивом, т.е. сходящемся переходном процессе, будет первое отклонение, непосредственно следующее за возмущением.
Величина динамического отклонения зависит от динамических свойств объекта регулирования, величины возмущения, закона регулирования и настроек регулятора.
Степень воздействия
регулятора, понижающего динамическое
отклонение, характеризуется динамическим
коэффициентом регулирования
![]() :
отношением максимального отклонения
регулируемой величины от задания
в переходном процессе регулирования,
вызванном однократным скачкообразным
возмущением, к отклонению от задания
:
отношением максимального отклонения
регулируемой величины от задания
в переходном процессе регулирования,
вызванном однократным скачкообразным
возмущением, к отклонению от задания
![]() при том же возмущении, но без регулятора:
при том же возмущении, но без регулятора:
![]() .
.
Величина потенциального отклонения характеризует свойства объекта регулирования и величину возмущения и равна
![]() ,
,
где - коэффициент передачи объекта;
![]() - величина возмущения.
- величина возмущения.
При установке регуляторов на астатических объектах, где потенциальное отклонение х0 бесконечно, условный динамический коэффициент регулирования
![]()
или
![]()
где — коэффициент передачи астатического объекта;
Т — постоянная времени астатического объекта;
— запаздывание объекта.
67
Качество регулирования определяется и временем регулирования — продолжительностью переходного процесса при регулировании. Процесс, регулирования охватывает период времени tР (рис. 1.33) от момента отклонения регулируемой величины от задания до возвращения ее регулятором к заданному

Рис. 1.33. Переходные процессы регулирования и качество ре- гулирования (время регулирования): а – апериоди- ческий затянутый процесс; б – апериодический гра- ничный процесс; в – колебательный процесс
значению (с известной степенью точности, определяемой зоной нечувствительности регулятора).
Время регулирования tР зависит от динамических свойств объекта, закона регулирования и настроек регулятора. Чтобы характеризовать воздействие регулятора, время tР выражают по отношению к величине запаздывания в объекте .
Продолжительность переходного процесса может быть различной в зависимости от настроек регулятора. Однако она не может быть меньше некоторого определенного значения, минимального для регулятора данного типа. Это минимальное время свойственно граничным апериодическим процессам регулирования. Во всех других случаях время регулирования увеличивается (для затянутых апериодических процессов или для колебательных процессов, см. рис. 1.33).
Степень
колебательности переходного процесса
характеризуется перерегулированием
—
отношением второй, противоположно
направленной, амплитуды колебаний
![]() к
первой, максимальной, амплитуде
к
первой, максимальной, амплитуде
![]() ;
отношение
это выражается в процентах величины
(см.
рис. 1.32).
;
отношение
это выражается в процентах величины
(см.
рис. 1.32).
Изменял настройки регулятора, можно получить три одном и том же регуляторе различное перерегулирование: от нуля при апериодическом характере процесса до 100% при установившемся колебательном, незатухающем процессе и даже свыше 100% при расходящихся колебаниях.
Чем больше перерегулирование, тем более колебательный про-
68


69
цесс имеет место, тем он продолжительнее. Чем больше перерегулирование, тем меньше первая, максимальная амплитуда колебаний в переходном процессе .
Необходимую величину перерегулирования выбирают исходя из условий технологического процесса, решая, что целесообразнее - меньшие, но двусторонние отклонения от задания при более длительном процессе регулирования или односторонние отклонения с несколько большей максимальной амплитудой, но при более быстром возвращении регулируемой величины к заданному значению,
О качестве регулирования можно судить также по так называемым интегральным оценкам — значениям определенных интегралов по времени (с момента появления отклонения до окончания процесса регулирования) некоторой функции отклонения регулируемой величины (рис. 1.34).
При использовании интегральных оценок наилучшим считают такой процесс регулирования, при котором величина интеграла имеет наименьшее значение.
Наиболее
распространена на практике интегральная
оценка качества, имеющая вид
![]() (квадратичная площадь отклонения).
(квадратичная площадь отклонения).
Качество регулирования систем с автоколебательным, режимом работы (релейного двухпозиционного регулирования) характеризуется амплитудой ха и периодом Та автоколебаний (рис. 1.35). Для технологического процесса с изменяющейся нагрузкой показателем качества режима автоколебаний является также установившееся отклонение хуст среднего, а следовательно, фактического значения регулируемой величины от заданного значения (см. рис. 1.35). При одних и тех же условиях регулирования установившееся отклонение меняется при изменении нагрузки объекта.