

1.6.1. Показатели качества при установке серийных регуляторов
Ниже приводятся значения показателей качества для процессов регулирования при мгновенном скачкообразном возмущении как наиболее тяжелой форме возмущающего воздействия и в зависимости от динамических свойств объекта, которые характеризуются отношением запаздывания к постоянной времени объекта /Т.
Непрерывные регуляторы на статических объектах. При установке регуляторов И-, П-, ПИ- и ПИД-действия и типовых процессах регулирования могут быть получены динамические коэффициенты регулирования, приведенные на рис. 1.37. По этим значениям определяют для конкретных условий максимальное динамическое отклонение
Динамический
коэффициент регулирования
![]() (и максимальное отклонение регулируемой
величины от задания) всегда значительно
больше при установке И-регулятора.
(и максимальное отклонение регулируемой
величины от задания) всегда значительно
больше при установке И-регулятора.
Применение П- или ПИ-регуляторе в позволяет получить при тех же типовых процессах меньшее значение динамического коэффициента регулирования.
Ниже приведены отношения величин при использовании ПИ-и П-регуляторов к величине при И-регуляторе для различных значений /Т (для процессов с 20%-мым перерегулированием):
/Т 0,1 0,2 0,3 0,4 0,5 0,8 1,0
(![]() )ПИ/(
)И 0,29
0,42 0,53 0,63 0,70 0,88 0,94
)ПИ/(
)И 0,29
0,42 0,53 0,63 0,70 0,88 0,94
( )П/( )И 0,33 0,46 0,57 0,65 0,72 0,90 0,95
Значения динамического коэффициента при использовании П- и ПИ-регуляторов близки; в этом отношении ПИ-регулятор не обладает заметными преимуществами по сравнению с регулятором П-действия (однако применение П-регулятора сопровождается остаточным отклонением регулируемой величины от задания).
Наименьшее значение динамического коэффициента регулирования может быть получено при установке ПИД- регулятора.
Ниже приведены отношения величин при ПИД-регуляторе к значениям которые могут быть достигнуты при установке
74

75
ПИ-регулятора (для процессов с 20%-ным перерегулированием) :
/Т………………………….. 0,1 0,2 0,3 0,4 0,5 0,8 1,0
( )пид/ ( )пи………..0.64 0,72 0,78 0,80 0,80 0,80 0,81
Значение динамического коэффициента одного и того же регулятора зависит от характера типового оптимального процесса регулирования. Оно всегда максимально для апериодического процесса регулирования и убывает по мере увеличения перерегулирования.
С увеличением отношения /Т объекта динамический коэффициент регулирования всегда быстро возрастает, стремясь к единице; эффективность воздействия регулятора на величину максимального отклонения при этом снижается. Чтобы обеспечить одно и то же значение динамического коэффициента при увеличении /Т объекта, приходится применять все более сложные регуляторы.
Время
регулирования различно
для регуляторов всех типов и зависит
от характера типового оптимального
процесса регулирования; значения
относительного времени регулирования
![]() приведены
на рис. 1.38.
приведены
на рис. 1.38.
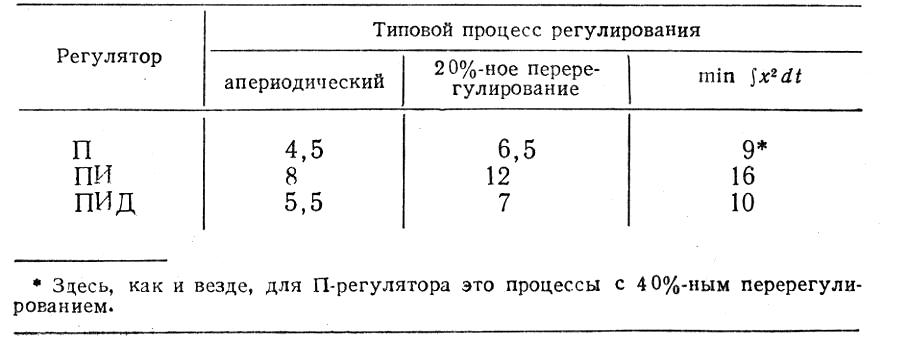
Для И-регуляторов величина существенно изменяется при изменении и значительно выше, чем у остальных типов регуляторов. Для П-, ПИ- и ПИД-регуляторов — величина постоянная при разных и определяется лишь характером выбранного типового оптимального процесса регулирования (табл. 1.5).
Таблица 1.5
Относительное время регулирования (статические объекты)
76
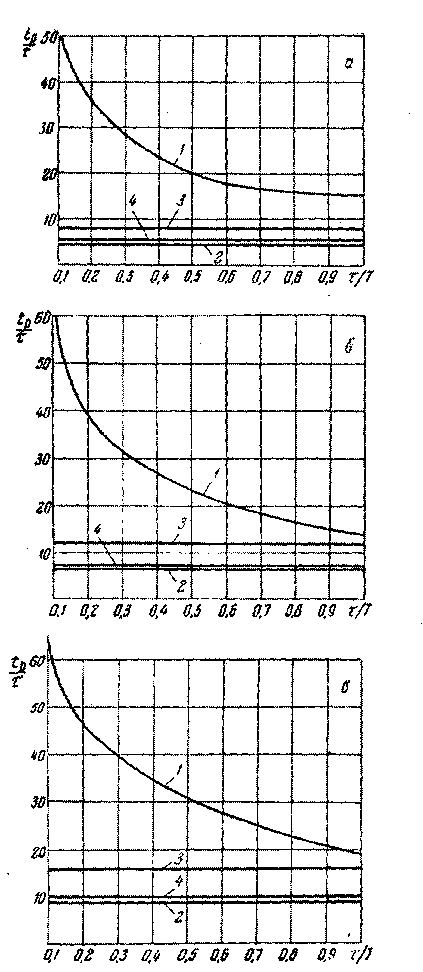
Рис. 1.38. Время регулирования на статических
объектах: а – процесс; б – процесс с
20%-ным перерегулированием; в –
процесс с
![]() :
1 – И-регуля-
:
1 – И-регуля-
тор; 2 – П-регулятор; 3 – ПИ-регуля –
тор; 4 – ПИД-регулятор
77
Минимальное время регулирования может быть достигнуто при установке П- и ПИД-регуляторов. Время регулирования для ПИ-регуляторов примерно вдвое выше, чем для П-регулятора, и лишь введение, дифференциального воздействия (ПИД-регулирование) позволяет сократить время регулирования.
При различных типовых оптимальных процессах наименьшее время регулирования может быть получено в апериодическом процессе регулирования (для всех типов регуляторов).
Остаточное
отклонение δ
при установке П-регулятора можно
определить по графикам, приведенным на
рис. 1.39, где указана относительная
величина остаточного отклонения
![]() типовых оптимальных.
типовых оптимальных.
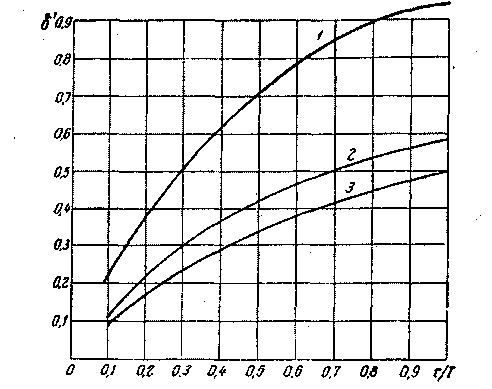
Рис. 1.39. Остаточное отклонение на статических объектах: 1 – апериодический процесс; 2 – процесс с 20%-ным перерегулированием; 3 – процесс с 40%-ным перерегулированием
процессов регулирования; по этим значениям δ′ определяют фактическое остаточное отклонение.
Остаточное отклонение всегда резко убывает при уменьшении величины τ/Т.
Непрерывные регуляторы на астатических объектах.
Регуляторы И-действия на астатических объектах не
78
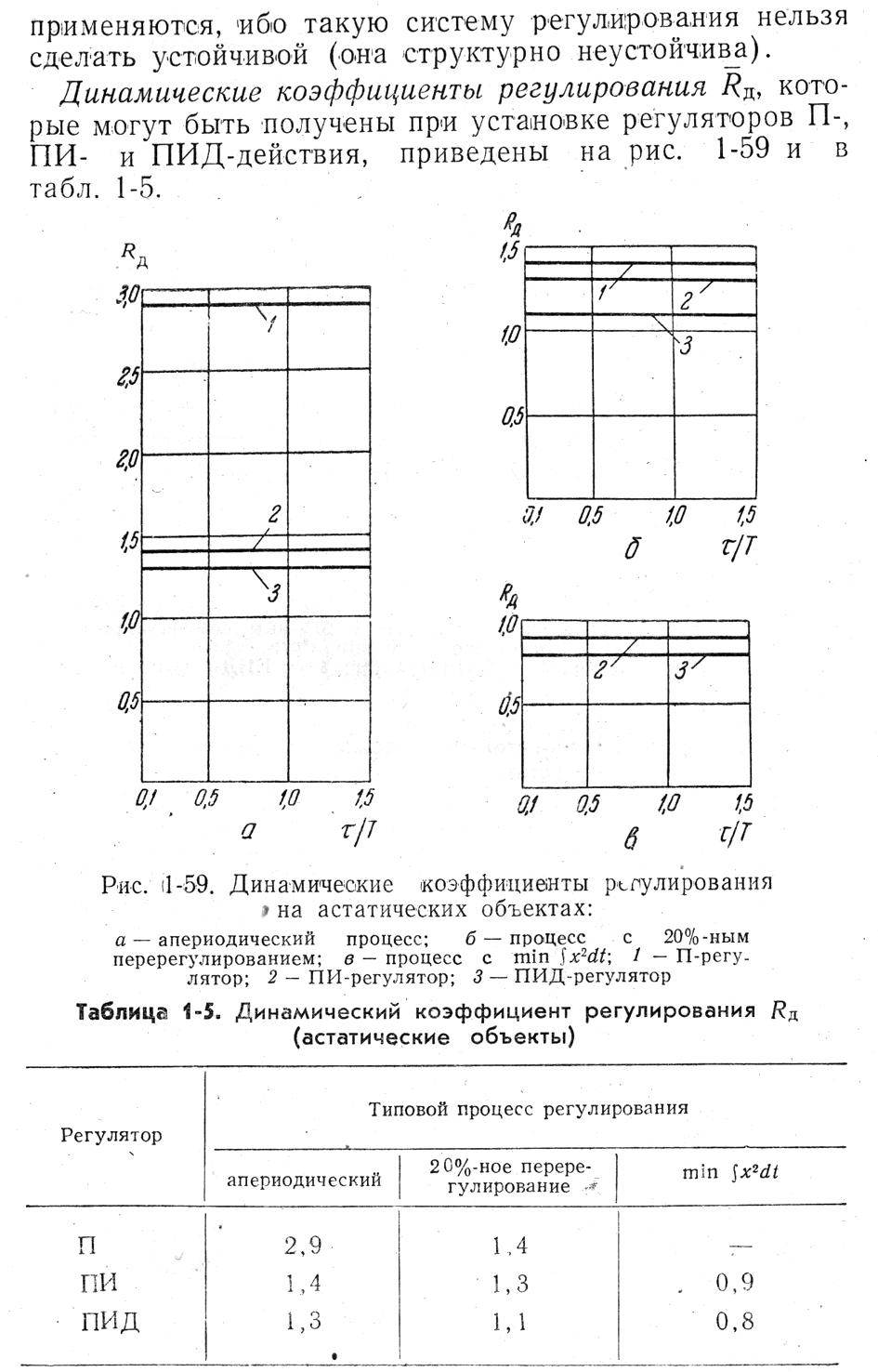
применяются, ибо такую систему регулирования нельзя сделать устойчивой (она структурно неустойчива).
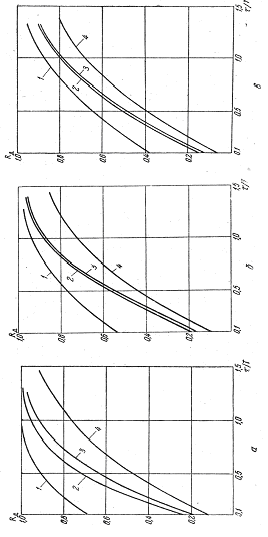
Динамические
коэффициенты регулирования![]() ,
которые
могут быть получены при установке
регуляторов П-, ПИ- и ПИД-действия,
приведены на рис. 1.40 и в табл. 1.6.
,
которые
могут быть получены при установке
регуляторов П-, ПИ- и ПИД-действия,
приведены на рис. 1.40 и в табл. 1.6.
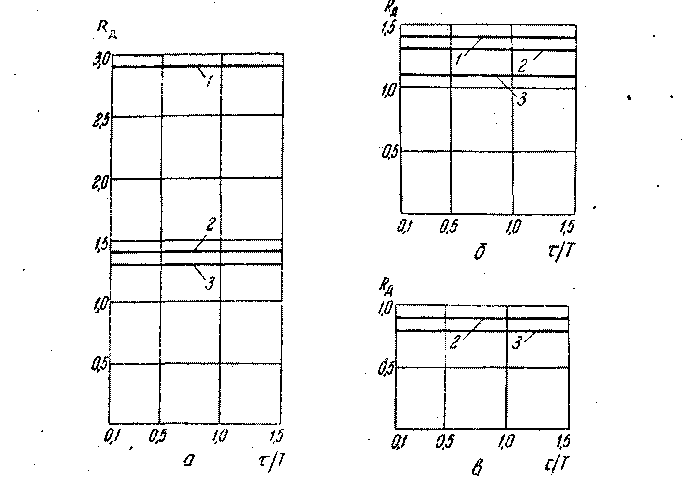
Рис. 1.40. Динамические коэффициенты регулирования на астатических объектах: а – апериодический процесс; б – процесс с 20%-ным перерегулированием; в – процесс с : 1 – П-регулятор; 2 – ПИ-регулятор; 3 – ПИД-регулятор
79
Таблица 1.6
Динамический коэффициент
![]() регулирования (астатические объекты)
регулирования (астатические объекты)
|
В![]() ремя
регулирования
которое может быть полу-
чено
при установке регуляторов П-, ПИ- и
ПИД-действия, приведено на рис. 1.41 и в
табл.1.7
ремя
регулирования
которое может быть полу-
чено
при установке регуляторов П-, ПИ- и
ПИД-действия, приведено на рис. 1.41 и в
табл.1.7
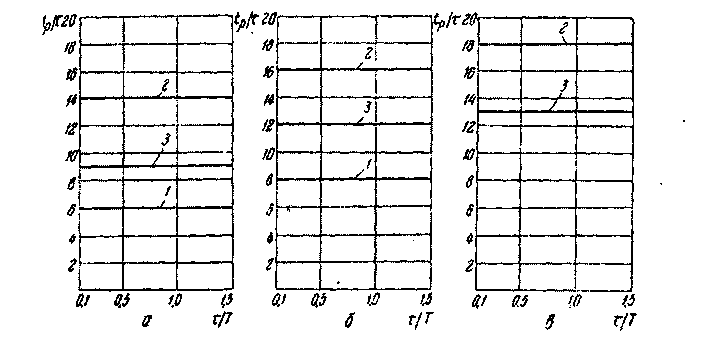
Рис. 1.41. Время регулирования на астатических объектах: а – апериодический процесс; б – процесс с 20%-ным перерегулированием; в – процесс с : 1 – П-регулятор; 2 – ПИ-регулятор; 3 – ПИД-регулятор
Значения этих показателей качества не изменяются при изменении отношения запаздывания к условной постоянной
80
времени
астатического
объекта
![]() .
.
Таблица 1.7
Относительное время регулирования (астатические объекты)
|
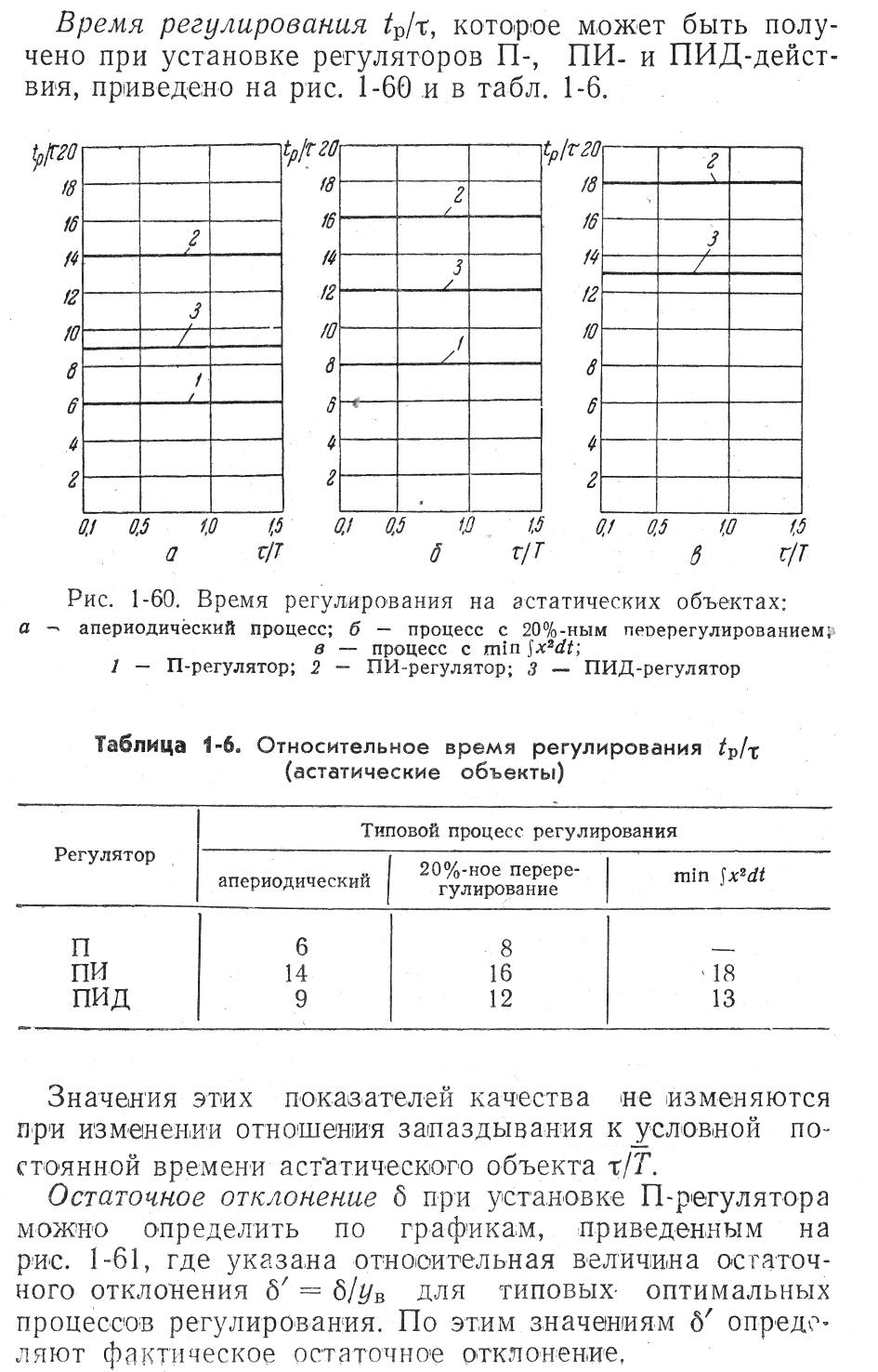
Остаточное отклонение δ при установке П-регулятора можно определить по графикам, приведенным на рис. 1.42, где указана относительная величина остаточного отклонения δ' = δ/ув.
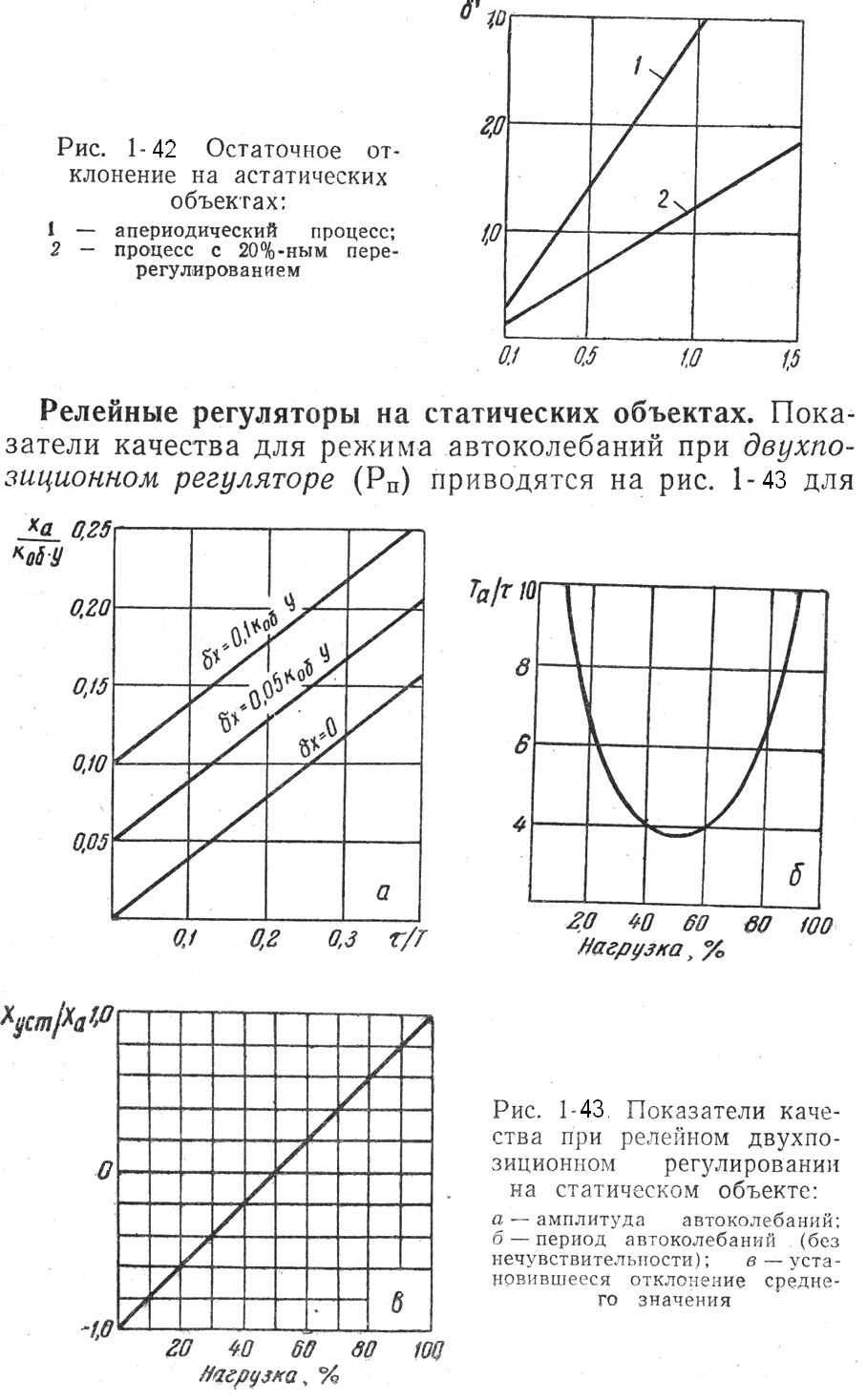
Рис. 1.42. Остаточное отклонение на
астатических объектах: 1 –
апериодический процесс;
2 – процесс с 20%-ным пе-
ререгулированием
Релейные регуляторы на статических объектах.
Показатели качества для режима автоколебаний при двухпозиционном регуляторе приводятся на рис. 1.43 для объектов, статическая характеристика которых линейна во всем диапазоне работы регулятора.
81
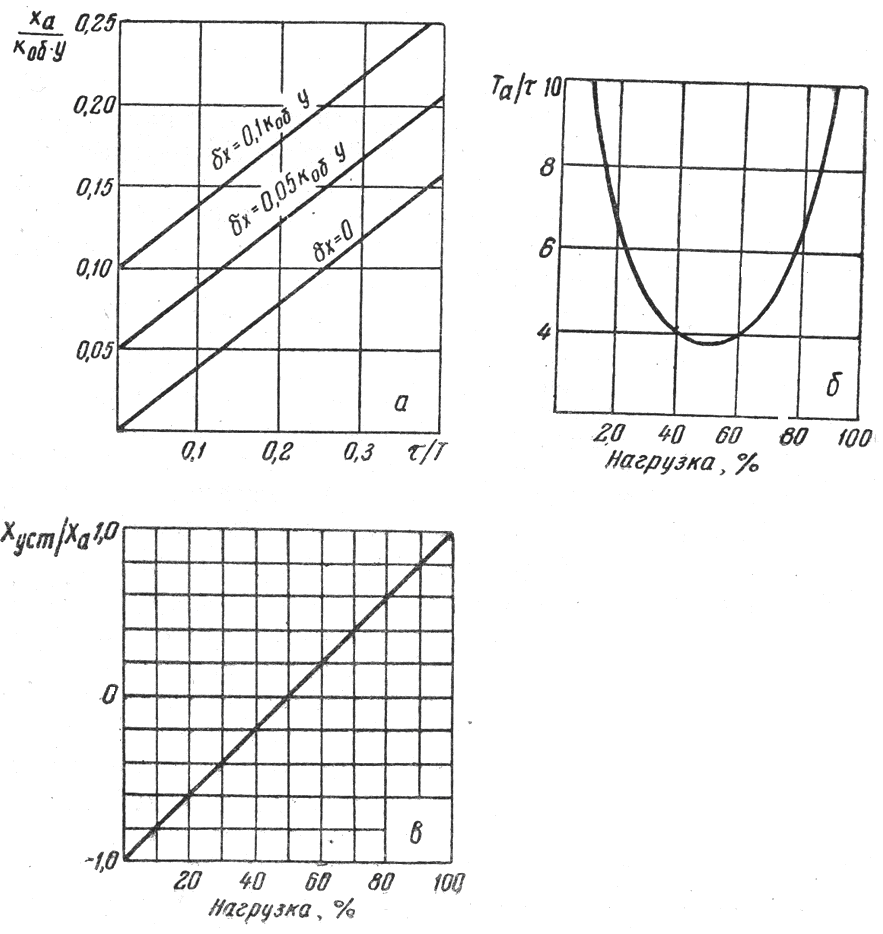
Рис. 1.43. Показатели качества при релейном двухпозиционном
регулировании на статическом объекте: а – амплитуда
автоколебаний; б – период автоколебаний (без нечувс-
твительности); в – установившееся отклонение средне-
го значения
Амплитуду
автоколебаний
![]() можно определить по графику, приведенному
на рис. 1.43, а.
График для определения периода
автоколебаний
можно определить по графику, приведенному
на рис. 1.43, а.
График для определения периода
автоколебаний
![]() при нечувствительности регулятора
при нечувствительности регулятора
![]() приведен на рис. 1.43, б.
Установившееся отклонение среднего
значения регулируемой величины от
заданного значения
приведен на рис. 1.43, б.
Установившееся отклонение среднего
значения регулируемой величины от
заданного значения
![]() можно определить по графикам рис. 1.43,
в.
можно определить по графикам рис. 1.43,
в.
Показатели качества при установке релейных регуляторов с
82
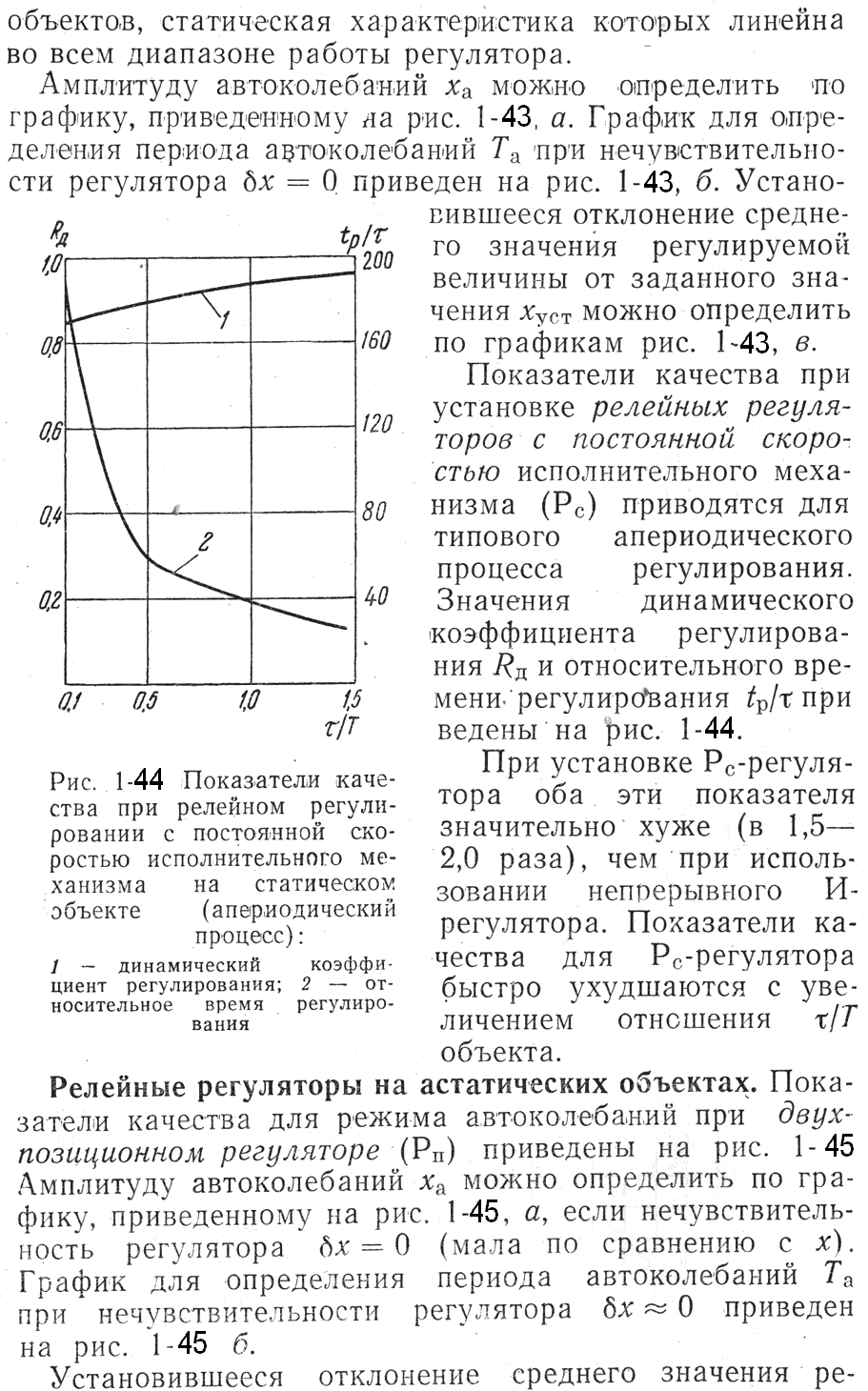
Рис. 1.44. Показатели качества при релейном
регулировании с постоянной ско-
ростью исполнительного механиз-
ма на статическом объекте (аперио-
дический процесс): 1- динамичес-
кий коэффициент регулирования;
2 – относительное время регулиро-
вания
постоянной
скоростью исполнительного
механизма
![]() приводятся для типового апериодического
процесса регулирования. Значения
динамического коэффициента регулирования
и относительного времени регулирования
приведены на рис. 1.44.
приводятся для типового апериодического
процесса регулирования. Значения
динамического коэффициента регулирования
и относительного времени регулирования
приведены на рис. 1.44.
При
установке
-регулятора
оба эти показателя значительно хуже (в
1,5 – 2,0 раза), чем при использовании
непрерывного И-регулятора. Показатели
качества для
-регулятора
быстро ухудшаются с увеличением отношения
![]() объекта.
объекта.
Релейные регуляторы на астатических объектах.
Показатели качества для режима автоколебаний при двухпозиционном регуляторе приведены на рис. 1.45. Амплитуду автоколебаний можно определить по графику, приведенному на рис. 1.45, а, если нечувствительность регулятора
83
(мала по сравнению с
).
График для определения периода
автоколебаний
при нечувствительности регулятора
![]()
приведен на рис. 1.45, б.
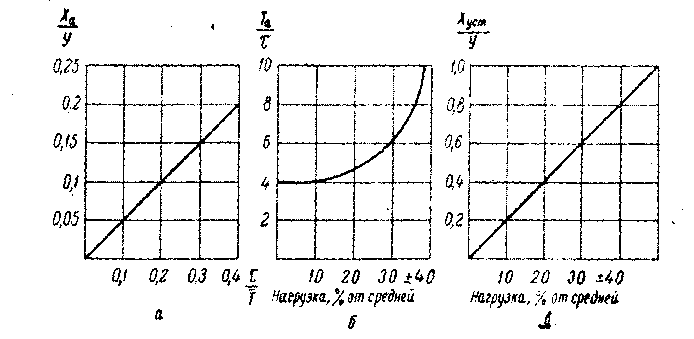
Рис. 1.45. Показатели качества при релейном двухпозиционном регулировании на астатических объектах: а – амплитуда автоколебаний; б – период автоколебаний; в – установившееся отклонение среднего значения
Релейные регуляторы с постоянной скоростью исполнительного механизма на астатических объектах не применяют, ибо такую систему регулирования нельзя сделать устойчивой.