

Метод “разделяй и властвуй”
Известная
нижняя оценка для задачи построения
выпуклой оболочки в трехмерном
пространстве такая же, как и в двумерном:
![]() .
Алгоритмdivide-and-conquer
был предложен в [5], и достигает требуемой
нижней оценки. Позже в [3] были внесены
важные корректировки в алгоритм по
сравнению с оригинальной статьей.
Алгоритм является обобщением алгоритма
построения выпуклой оболочки на плоскости
с мостиками на основе линейной
разделимости.
.
Алгоритмdivide-and-conquer
был предложен в [5], и достигает требуемой
нижней оценки. Позже в [3] были внесены
важные корректировки в алгоритм по
сравнению с оригинальной статьей.
Алгоритм является обобщением алгоритма
построения выпуклой оболочки на плоскости
с мостиками на основе линейной
разделимости.
Принцип
алгоритма такой же, как и в двумерном
пространстве: отсортировать точки по
![]() координате, разделить их на два множества,
рекурсивно построить выпуклую оболочку
в каждом из множеств и слить в одно.
Слияние может быть сделано за сложность
координате, разделить их на два множества,
рекурсивно построить выпуклую оболочку
в каждом из множеств и слить в одно.
Слияние может быть сделано за сложность![]() ,
таким образом, общая сложность составляет
,
таким образом, общая сложность составляет![]() .
.
О’Рурк
[6] так комментировал этот алгоритм в
своей книге: “этот алгоритм важен
теоретически и сам по себе довольно
красив. Однако его довольно трудно
реализовать, и, кажется, он не применим
на практике, в отличие от асимптотически
более медленных алгоритмов…". Первое
полное описание построения выпуклой
оболочки в 3D
методом “разделяй и властвуй” было
представлено Эдельсбрунером в [7]. Позже
Дэй описал реализацию этого алгоритма
в [8], однако реализация была излишне
сложной и асимптотически не оптимальной
(со сложностью
![]() ).
).
Ниже
приводится псевдокод алгоритма
divide-and-conquer,
с учетом того, что на вход подается
отсортированное множество по координате
![]() .
.
Algorithm DIVIDE-AND-CONQUER(P) CH(P)
if (
 )then
)thenпостроить
 любым методом
любым методомreturn





return

Предварительная
сортировка элементов множества
![]() по координате
по координате![]() требует
требует![]() операций. Благодаря сортировке и тому,
как выполняется шаги 4-5 алгоритма,
множества
операций. Благодаря сортировке и тому,
как выполняется шаги 4-5 алгоритма,
множества
![]() и
и
![]() представляют два непересекающихся
трехмерных политопа. Основная сложность
заключается в выполнении функции
представляют два непересекающихся
трехмерных политопа. Основная сложность
заключается в выполнении функции
![]() за время
за время
![]() :
необходимо построить цилиндрическую
триангуляцию, опирающуюся на выпуклые
оболочки
:
необходимо построить цилиндрическую
триангуляцию, опирающуюся на выпуклые
оболочки
![]() и
и
![]() по некоторым контурам и удалить из
по некоторым контурам и удалить из
![]() и
и
![]() части, оказавшиеся скрытыми. В выпуклой
оболочке
части, оказавшиеся скрытыми. В выпуклой
оболочке
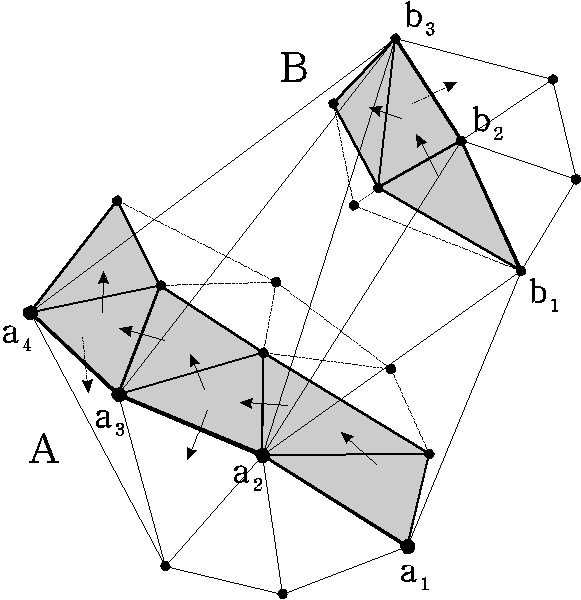
![]() добавится некоторый ”обод” из граней
с топологией цилиндра без оснований
(cм.
рисунок 6). Количество граней линейно
от размера двух политопов: каждая грань
использует как минимум одно ребро из
добавится некоторый ”обод” из граней
с топологией цилиндра без оснований
(cм.
рисунок 6). Количество граней линейно
от размера двух политопов: каждая грань
использует как минимум одно ребро из
![]() или
или
![]() ,
таким образом количество граней не
более чем общее количество ребер.
,
таким образом количество граней не
более чем общее количество ребер.
Рассмотрим шаг слияния двух оболочек более подробно: сначала будет описана процедура слияния двух выпуклых оболочек из [1], а затем будут предложены улучшения.
|
|
|
Рисунок 6
|

Рассмотрим слияние выпуклых оболочек.
В [3] для представления структуры выпуклой оболочки используется реберный список с двойными связями (РСДС). Укрупнено шаг слияния можно представить следующим образом:
Построить цилиндрическую триангуляцию
 .
.Удалить из A и B части оказавшиеся скрытыми в результате построения триангуляции
 .
.
Основываясь
на интуитивном уровне, построение
триангуляции можно рассматривать как
операцию заворачивания подарка. Хотя
![]() может иметь
может иметь![]() граней, а каждый шаг заворачивания в
общем случае требует
граней, а каждый шаг заворачивания в
общем случае требует![]() операций, использование особенностей
трехмерных политопов позволяет решить
эту задачу за линейное время.
операций, использование особенностей
трехмерных политопов позволяет решить
эту задачу за линейное время.
Построение
триангуляции начинается с нахождения
некоторого ее ребра. Наиболее удобный
способ состоит в проектировании выпуклых
оболочек A
и B
на плоскость XOY
и затем нахождении нижнего мостика e
[3] (таким образом можно поддерживать
нижнюю выпуклую оболочку проекции точек
на XOY)
(см. рисунок 7). Имея ребро e
можно начать построение
![]() ,
выбрав в качестве опорной плоскость,
проходящую через реброe
параллельно оси OZ.
,
выбрав в качестве опорной плоскость,
проходящую через реброe
параллельно оси OZ.
На
очередном шаге построения
![]() в качестве базы используется последняя
построенная грань триангуляции
в качестве базы используется последняя
построенная грань триангуляции![]() .
Пусть грань
.
Пусть грань![]() является базовой на текущем шаге. Теперь
среди вершин, смежных с
является базовой на текущем шаге. Теперь
среди вершин, смежных с![]() необходимо выбрать вершину
необходимо выбрать вершину![]() так, чтобы грань
так, чтобы грань![]() образовала наибольший выпуклый угол с
образовала наибольший выпуклый угол с![]() среди всех граней
среди всех граней![]() .
.
|
|
|
Рисунок 7 Начальный
и последующие шаги построения процедуры
построения
|

Аналогичным
образом, среди всех вершин, смежных с
![]() ,
выберем вершину
,
выберем вершину![]() .
Теперь, когда выявлены два претендента
.
Теперь, когда выявлены два претендента![]() и
и![]() ,
делается заключительное сравнение:
если
,
делается заключительное сравнение:
если![]() образует с
образует с![]() больший выпуклый угол, чем
больший выпуклый угол, чем![]() ,
то
,
то![]() добавляется к
добавляется к![]() (в противном случае добавляется
(в противном случае добавляется![]() ),
и на этом шаг заканчивается. Используя
тот факт, что в РСДС можно эффективно
проходить ребра, инцидентные некоторой
вершине в порядке обхода по часовой
стрелке или против нее, можно хранить
информацию о пройденных вершинах для
выпуклых оболочек следующим образом
(см. рисунок 8).
),
и на этом шаг заканчивается. Используя
тот факт, что в РСДС можно эффективно
проходить ребра, инцидентные некоторой
вершине в порядке обхода по часовой
стрелке или против нее, можно хранить
информацию о пройденных вершинах для
выпуклых оболочек следующим образом
(см. рисунок 8).
|
|
Рисунок 8 Шаг,
обеспечивающий продвижение при
построении
|

Пусть
грань
![]() образует наибольший выпуклый угол с
образует наибольший выпуклый угол с![]() из всех
из всех![]() сi=2,…,k.
Любое ребро
сi=2,…,k.
Любое ребро
![]() ,
при 1<i<s
оказывается внутри выпуклой оболочки
,
при 1<i<s
оказывается внутри выпуклой оболочки
![]() ,
и поэтому его можно исключить из
дальнейшего рассмотрения. Просмотр
ребер, инцидентных
,
и поэтому его можно исключить из
дальнейшего рассмотрения. Просмотр
ребер, инцидентных![]() ,
следует начинать с последнего из
просмотренных ребер, так как все другие
удалены. Таким образом, на заворачивание
требуется
,
следует начинать с последнего из
просмотренных ребер, так как все другие
удалены. Таким образом, на заворачивание
требуется![]() операций.
операций.
Удаление
из
![]() и
и![]() частей оказавшихся скрытыми можно
сделать за линейное время от размера
удаляемых частей (процесс удаления
можно охарактеризовать как обход
структуры, начиная с заведомо удаляемой
грани, и не переходящий через ребра,
помеченные как принадлежащие “ободам”
цилиндрической триангуляции).
частей оказавшихся скрытыми можно
сделать за линейное время от размера
удаляемых частей (процесс удаления
можно охарактеризовать как обход
структуры, начиная с заведомо удаляемой
грани, и не переходящий через ребра,
помеченные как принадлежащие “ободам”
цилиндрической триангуляции).
Таким
образом, слияние
![]() и
и![]() может быть выполнено за время
может быть выполнено за время![]() .
.
Построение цилиндрической триангуляции можно упростить, если хранить неполную информацию о РСДС: можно исключить хранение информации о ребрах выпуклой оболочки. Для построения цилиндрической триангуляции достаточно информации о структуре политопов из ссылок между гранями (каждая грань имеет три ссылки на соседние граци в порядке обхода по часовой стрелке).
Таким образом, вместо того, чтобы обходить ребра, инцидентные вершине в порядке обхода против часовой стрелке, достаточно обойти грани сливаемых выпуклых оболочек, имеющие общие ребра с ободом цилиндрической триангуляции, и которые будут скрыты после слияния (т.е. внутренние грани). Обход граней производится по ободу цилиндрической триангуляции (см. рисунок 9).
|
|
|
Рисунок 9 Построение цилиндрической триангуляции при обходе граней, смежных с ободом цилиндрической триангуляции. |
Пройденных
граней будет не более чем общее количество
граней в сливаемых оболочках, и,
следовательно, общая сложность слияния
есть
![]() .
.
Заметим,
что
![]() не может быть однозначно идентифицирована
в случае, когда грани цилиндрической
триангуляции копланарны с гранями
сливаемых выпуклых оболочек (например,
при распределении точек на кубе этот
случай встречается довольно часто). В
таком случаем можно встретить проблемы
с построением
не может быть однозначно идентифицирована
в случае, когда грани цилиндрической
триангуляции копланарны с гранями
сливаемых выпуклых оболочек (например,
при распределении точек на кубе этот
случай встречается довольно часто). В
таком случаем можно встретить проблемы
с построением![]() ,
что и было сделано в [8] (именно вследствие
этого сложность реализации получилась
,
что и было сделано в [8] (именно вследствие
этого сложность реализации получилась![]() ,
а цилиндрическая триангуляция не всегда
односвязной). На рисунке 10 проиллюстрирована
эта ситуация.
,
а цилиндрическая триангуляция не всегда
односвязной). На рисунке 10 проиллюстрирована
эта ситуация.
|
|
|
Рисунок 10 Неоднозначность
построения цилиндрической триангуляции
|

Дэй в [8] приводит реализацию для внешнего обода, однако лучше строить цилиндрическую триангуляцию для внутреннего обода и, таким образом, упростить обработку частных случаев. Для выявления кандидата на включение в триангуляцию на следующем шаге, в случае копланарности граней-кандидатов, нужно брать ту грань, которая полностью принадлежит другой грани, если ни одна не входит в другую, можно брать произвольную.
После
построения цилиндрической триангуляции
можно обновить структуру РСДС за линейное
время. Заметим, что при таком подходе к
построению цилиндрической триангуляции
существенно упрощается удаление скрытых
частей сливаемых оболочек. Как отмечает
О’Рурк в [6], обод цилиндрической
триангуляции необязательно должен
образовывать простой цикл из ребер на
![]() (и аналогично
(и аналогично![]() )
(см. рисунок 11).
)
(см. рисунок 11).
|
|
Рисунок 11
|

Используемая
память:
на хранение сливаемых выпуклых оболочек
и на хранение цилиндрической триангуляции
требуется хранение примерно
![]() граней в худшем случае, что превосходит
в два раза просто хранение граней
выпуклой оболочки.
граней в худшем случае, что превосходит
в два раза просто хранение граней
выпуклой оболочки.