3.18. Козловой кран ккс-12,5
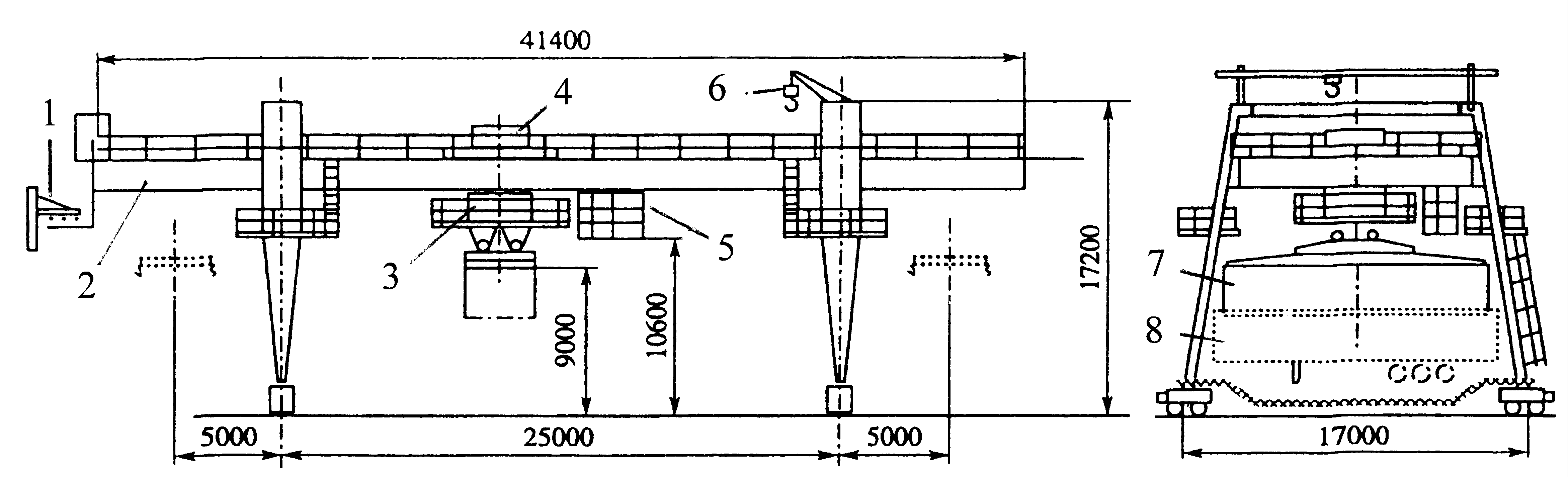
На рис. 3.18. представлена одна из возможных конструкций козлового крана – ККС-12,5 грузоподъемностью 12,5 т с подвесной тележкой. Мост 1 крана выполнен в форме решетчатой фермы большого сечения. Опоры 2 и 4 крепятся к мосту боковыми фланцами. Это позволяет увеличить базу крана и обеспечить широкий просвет между опорами для перемещения без разворота грузов длиной до 8 м на высоте 8 м. Одна из опор 2 крана делается жесткой, воспринимающей нагрузки в вертикальном направлении и нагрузки от сил инерции и давления ветра, действующих в горизонтальном направлении вдоль моста. Вторая опора 4 выполняется гибкой с целью компенсации непараллельности рельсов подкранового пути и температурных расширений.
Стойки опор попарно связаны стяжками 7. Механизм передвижения крана состоит из двух приводных 6 и двух ведомых 8 тележек. Грузовая тележка 3 перемещается вместе с кабиной по монорельсу, прикрепленному к нижней части фермы моста, с помощью тягового каната, приводимого в движение стационарной тяговой лебедкой 5. Механизм подъема груза размещен на грузовой тележке. Со стороны кабины консоль выполнена удлиненной для размещения кабины с целью обеспечения одинакового вылета консолей.
Подвод тока к крану осуществляется при помощи гибкого кабеля, наматываемого на кабельный барабан 9, а к грузовой тележке - по кабельной гирлянде, подвешенной на струне. Краны оборудованы сигнализатором давления ветра и противоугонным крановым захватом.
В отличие от обычных козловых кранов, мост и опоры которых представляют собой жестко связанную металлоконструкцию, имеется группа кранов, называемых самомонтирующимися.
В самомонтирующихся кранах под опорами отсутствуют балки. Ноги опор крепятся к независимым тележкам, причем одна нога опоры закрепляется на приводной тележке, а другая — на холостой. Для удержания ног в рабочем состоянии они скрепляются специальной тягой. На грузовых терминалах железных дорог преимущественное распространение получили самомонтирующиеся краны.
Параметры кранов различаются в широких диапазонах. У наиболее распространенных козловых кранов грузоподъемность составляет 1…50 т, высота подъема 4...25 м, пролет 10…42 м, скорость подъема груза 0,14…0,32 м/с, скорость передвижения крана 0,2…2 м/с, скорость передвижения тележки 0,1…1,2 м/с, емкость грейферов 1,6…15 м3.
Мостовые перегружатели (перегрузочные мосты) изготовляют обычно с грейферными захватами; они обслуживают главным образом открытые склады угля и руды, используются на промышленных предприятиях, электростанциях и в портах. Грузоподъёмность грейферных перегружателей с грузовой тележкой составляет 15—30 т, скорость передвижения грузовой тележки — 160…360 м/мин, подъёма груза — 60…70 м/мин; производительность 500…1000 т/ч. Для увеличения зоны обслуживания грузовые тележки могут выполняться с поворотной стрелой (скорость поворота 2…4 об/мин) с вылетом 3—6 м. Перегружатели с поворотным краном имеют грузоподъёмность 10…20 т, вылет стрелы 10…20 м; скорость движения крана по верхним поясам моста 120…180 м/мин; иногда их снабжают ленточным конвейером, который загружается краном, что сокращает его пробеги и увеличивает производительность перегружателя. Крюковые перегружатели для штучных грузов имеют грузоподъёмность до 300 т. Для обслуживания складов круглой (секторной) формы используют радиальные мосты, у которых одна опора неподвижная (поворотная), а другая перемещается по кольцевому пути. Мосты имеют пролёты до 120 м, длину консолей до 50 м. Время подъёма консолей 5—10 мин. Передвижение моста — установочное движение (скорость 10… 30 м/мин).
Высота кранов выбирается в зависимости от заданной высоты подъема груза с учетом габаритов сооружений, над которыми перемещаются грузы. В зависимости от поперечного профиля обслуживаемой площадки ходовые тележки опорных ног козловых кранов и мостовых перегружателей могут быть расположены на одинаковых или разных уровнях. В некоторых случаях одна из ходовых тележек расположена на уровне пролетного строения. Такие краны называются полукозловыми.
С развитием контейнерных перевозок все большее применение находят контейнерные козловые краны, имеющие грузоподъемность 20, 25, 34, 40 т и обеспечивающие многоярусное складирование крупнотоннажных контейнеров.
На железнодорожных контейнерных терминалах применяются, например, контейнерные краны, которые могут перерабатывать как крупнотоннажные контейнеры массой брутто 24 и 30,5 т, так и контрейлеры массой брутто 34 т (рис.3.19).
Мост крана 2 состоит из двух разнесенных на значительное расстояние коробчатых балок, жестко связанных концевыми балками. На платформе грузовой тележки 4 размещен поворотный контейнерный захват (спредер) 3, обеспечивающий горизонтальное положение контейнера независимо от равномерности его загрузки. Кабина управления 5 находится в непосредственной близости от него. Захват контейнера 7 или полуприцепа 8 осуществляется без помощи стропальщика.