3.5.2. Краны-штабелеры
Для обслуживания складов тарно-штучных грузов применяются мостовые краны – штабелеры, которые являются одной из разновидностей мостовых кранов. Вместо гибкой канатной грузовой подвески они имеют вертикальную колонну, по которой перемещается грузозахват. Это обеспечивает жесткий подвес груза и возможность полной автоматизации перегрузочных и складских работ при переработке тарно-штучных грузов на складах и в цехах предприятий. Автоматические мостовые краны-штабелеры называют мостовыми складскими роботами.
Мостовые краны-штабелеры принято классифицировать:
по конструкции моста и по способу катания по подкрановым путям - опорные (колеса крана опираются на подкрановые пути) и подвесные (ходовые колеса перемещаются по нижним полкам двутавров, которые служат в этом случае подкрановыми путями);
по наличию кабины для оператора - без кабины и с подъемной кабиной;
по конструкции грузовой тележки - с опорной и подвесной тележкой;
по конструкции главных балок моста - двутавры, сварные балки коробчатого сечения, сварные балки из трубы и тавра и т.д.;
по способу управления - ручное управление, полуавтоматическое; автоматическое;
по способу ручного управления - с пола (с помощью подвесного поста управления) и из подъемной кабины.
Несущей конструкцией крана-штабелера (рис.3.15) является мост 1. По нижнему поясу моста перемещается грузовая тележка 3 на четырех катковых подвесных тележках 5. На грузовой тележке смонтирована поворотная платформа, на нижней части которой установлен механизм поворота, а на верхней - механизм подъема 2. К платформе крепится жесткая или телескопическая колонна 6 с рамами для восприятия нагрузки от грузоподъемного устройства и направляющими для обеспечения работы клинового ловителя. Клиновые ловители срабатывают от ограничителя скорости при падении кабины из-за обрыва грузового каната или при скорости опускания более 0.5 м/с. По колонне передвигаются грузоподъемное устройство 7. Оно снабжается вилочным или другим захватом в зависимости от характера и геометрии груза.
Мостовой кран-штабелер имеет четыре направления движения (обозначены на рис. стрелками): I - передвижение моста по подкрановым путям; 2 - передвижение тележки по мосту; 3 - подъем и опускание грузозахвата; 4 - поворот колонны вокруг вертикальной оси. Мостовые краны-штабелеры имеют два привода передвижения моста - на каждой из концевых балок.
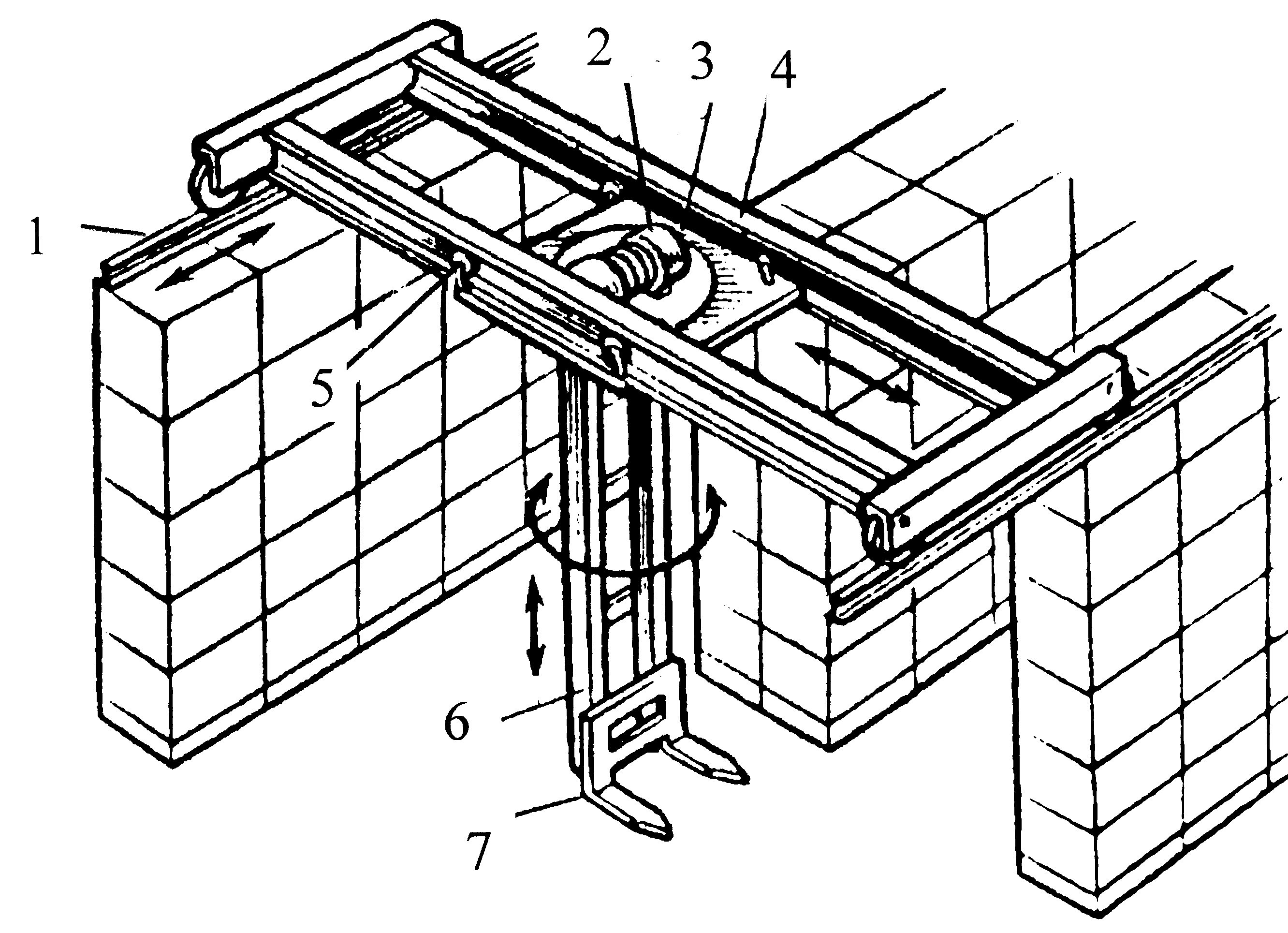
3.15. Мостовой кран-штабелер
Основные параметры мостовых кранов-штабелеров: грузоподъемность 125... 12500 кг; пролет моста 5...28,5 м; высота установки подкранового рельса 4 … 12 м; высота подъема грузозахвата 3,2...10,5 м; ширина крана-штабелера 1,6 … 8,2 м; высота моста 0,6...2,4 м; ширина проходов для штабелирования 1,0...2,8 м; скорости движения крана 0,9...2,1 м/с; передвижения тележки 0,3...0,7 м/с, подъема грузозахвата 0,14...0,33 м/с; частота вращения колонны 0,4 мин-1.
Достоинства мостовых кранов-штабелеров: хорошее использование объема складских помещений; узкие проходыа для штабелирования; большая высота подъема; высокая производительность; возможность полной автоматизации переработки грузов.
Недостатки: большая масса моста (особенно при больших пролетах); сложность автоматизации (по сравнению со стеллажными кранами-штабелерами).
Применяют мостовые краны-штабелеры в закрытых складах для переработки тарно-штучных грузов и металлопроката при средних грузопотоках и больших запасах хранения грузов; в гибких автоматических производствах - в качестве транспортно-складских роботов, обслуживающих автоматический склад и производственный участок; в качестве кранов-манипуляторов при погрузке и разгрузке тарно-штучных грузов из бортовых автомобилей (в этих случаях используют мостовые краны-штабелеры с телескопической колонной).
3.16. Стеллажные краны-штабелеры
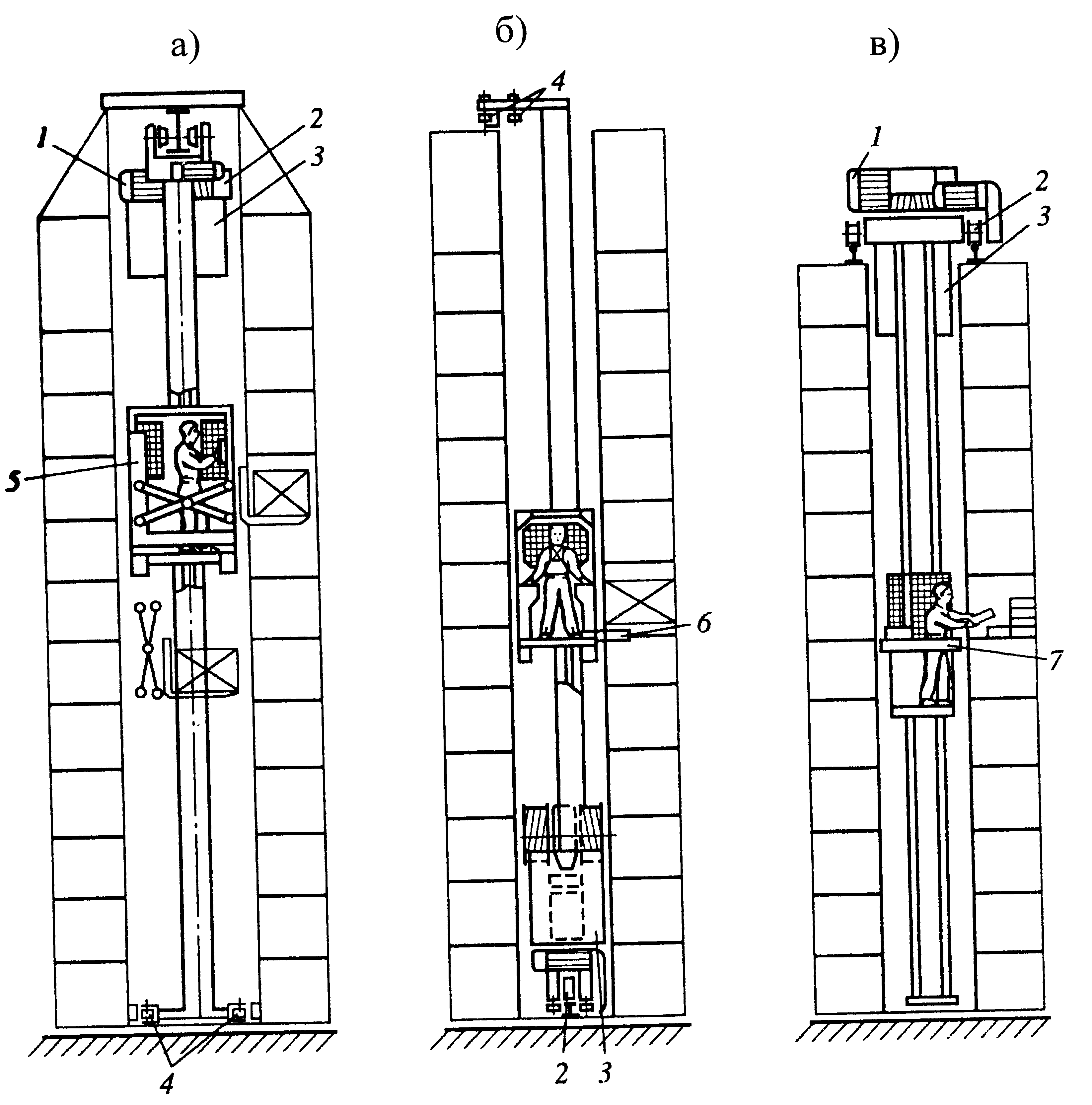
а - подвесной; б - опирающийся на напольный рельс: в - опирающийся на стеллаж;
1 — механизм подъема; 2 — ходовая часть; 3 — щкаф с электроаппаратурой; 4 - горизонтальные ролики; 5 - выдвижной поворотный захват; 6 — подвижной телескопический захват; 7 — стол
Разновидностью мостовых кранов-штабелеров являются стеллажные краны-штабелеры, обслуживающие преимущественно высотные склады. (рис. 3.16). Их классифицируют:
по числу вертикальных колонн - с одной или двумя колоннами;
по способу управления - с ручным управлением из подъемной кабины, полуавтоматическим, автоматическим;
по способу опирания подкрановых путей - с одним верхним подкрановым путем и напольными роликами (рис. 3.16,а), с одним верхним и одним нижним рельсовыми путями (рис.3.16, б), с двумя подкрановыми путями, уложенными по стеллажам (рис.3.16,в) и др.;
по числу грузозахватов - с одним или двумя;
по типу грузозахвата - с телескопическим грузозахватом; с поворотно-выдвижными вилами;
по роду перерабатываемых грузов и назначению - для комплектации отдельных штучных грузов, для переработки грузов целыми пакетами на поддонах, для длинномерных грузов (металлопроката).
В современных транспортно – грузовых комплексах расширяется применение автоматизированных стеллажных штабелеров с автоматическим адресованием. Датчики системы автоматического управления располагаются на ходовой платформе (адресование по длине) и на подъемной платформе (адресование по высоте и по ширине). Шунты или другие замыкающие устройства для датчиков устанавливаются в нижней части металлоконструкции стеллажей (адресование по длине), на вертикальной колонне (адресование по высоте) и на секции телескопического грузозахвата (адресование по ширине).
Автоматические стеллажные краны-штабелеры называют стеллажными складскими роботами. Схема устройства такого робота показана на рис.3.17. Стеллажный кран-штабелер имеет три направления движения (степени подвижности). Они обозначены на рис.3.17 стрелками: передвижение крана-штабелера вдоль подкранового пути; подъем и опускание грузовой платформы; выдвижение телескопического грузозахвата влево и вправо от крана-штабелара.
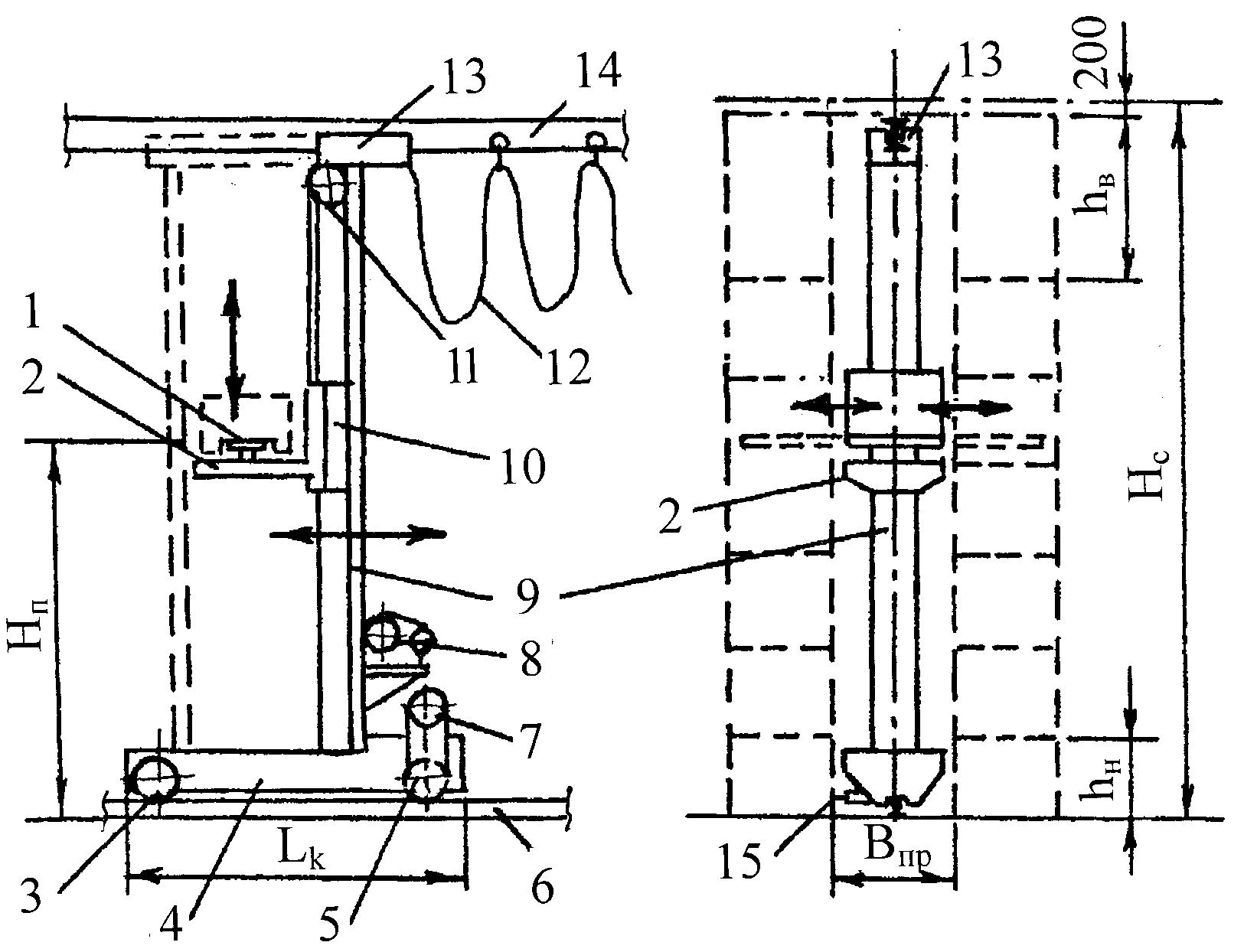
3.17. Схема стеллажного складского робота:
I - телескопический (выдвижной) грузозахват; 2 - подъемная платформа; 3 - холостое ходовое колесо; 4 - ходовая опорная платформа; 5 - приводное ходовое колесо; 6 - опорный подкрановый путь; 7 - привод передвижения крана; 8 -привод подъема; 9 - вертикальная колонна; 10 - каретка подъемной платформы; 11 - канатно-блочная система механизма подъема; 12 - подвеска гибкого кабеля; 13 - блок направляющих роликов; 14 - верхняя направляющая балка; 15 - датчики системы автоматического управления
На колонне крана-штабелера имеются направляющие для катков каретки подъемной платформы. Вся нагрузка от веса груза и штабелера воспринимается нижним подкрановым путем 6. Верхняя балка 14 служит только для направления движения крана-штабелера.
Грузоподъемность стеллажных кранов находится в пределах 0,25… 12,5 т, наибольшая высота подъема 18 м, скорость подъема 0,1...0,5 м/с, скорость передвижения 1,0...2,5 м/с, скорость выдвижения грузозахвата 0,13…0,26 м/с, высота нижнего (первого) яруса над полом 0,4...0,75 м; ширина межстеллажного прохода 0,8... 1,4 м (на 150 - 300 мм шире перемещаемого груза);
Достоинства стеллажных кранов-штабелеров: хорошее заполнение складских объемов грузами (за счет узкого межстеллажного прохода и большой высоты подъема); высокая производительность; возможность полной автоматизации складских работ.
Недостатки: узкая специализация по функциям (только обслуживание высотных стеллажей в зоне хранения) и по перерабатываемым грузам (определенные размеры пакетов); обслуживание только двух стеллажей, ограниченная зона действия.
Применяют стеллажные краны-штабелеры в закрытых складах тарно-штучных грузов и металлопроката при больших грузопотоках и больших запасах хранения грузов, а также в качестве складских и транспортно-складских роботов в гибких автоматических производствах. В автоматизированных цехах и складах для формирования и расформирования пакетов, для перегрузки штучных грузов с одного конвейера на другой, для отборки, сортировки и комплектации грузов используют различные перегрузочные роботы.
3.5.3. Козловые краны и мостовые перегружатели
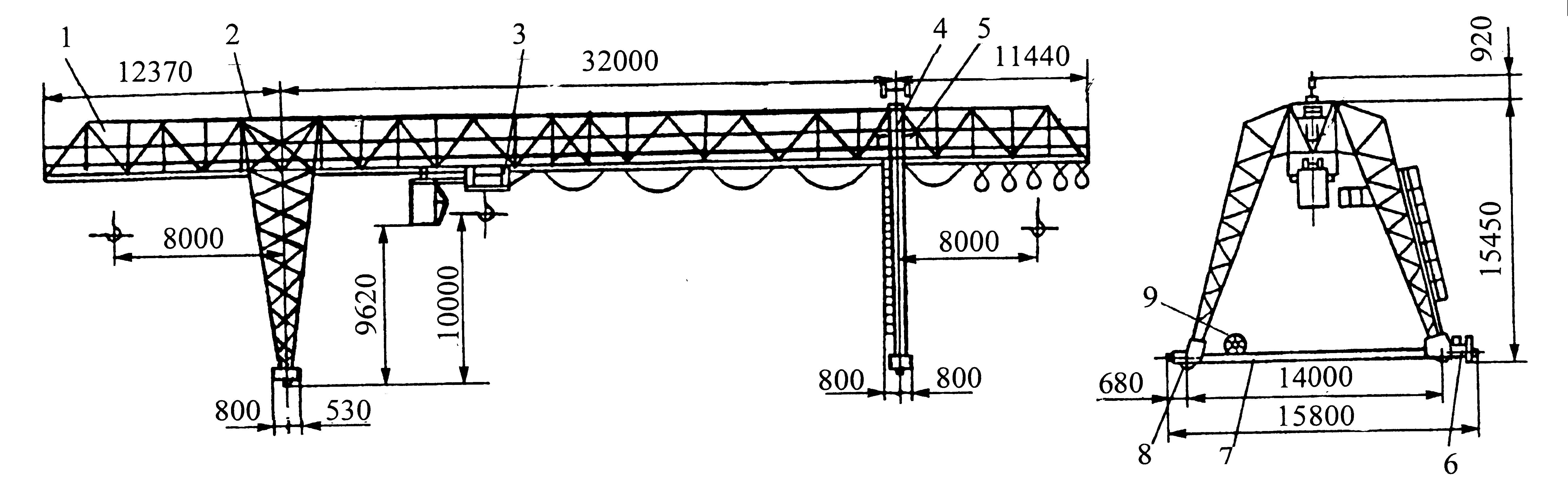
Козловые краны представляют собой разновидность кранов мостовых. Их отличие заключается в том, что мост крана устанавливается на опорах, жестко или шарнирно соединенных с ним. Каждая опора состоит из двух ног, поставленных наклонно друг к другу. Нижними концами ноги опираются на ходовую часть крана, снабженную колесами. Такое устройство исключает необходимость в сооружении эстакад для подкрановых путей, которые укладываются на уровне земли. На прирельсовых складах козловые краны получили широкое применение при переработке контейнеров, металлов, лесных, а также навалочных грузов. Мост козлового крана перекрывает железнодорожные пути, автомобильный проезд и площадь склада.
Козловые краны классифицируют:
по конструкции моста - однобалочные (главная балка моста изготовлена из двутавра в сочетании с другими конструкциями) и двухбалочный (имеет две главные балки коробчатого сечения, сваренные из листов);
по наличию консолей у моста - с двумя консолями (по обоим концам моста), с одной консолью, бесконсольные;
по конструкции грузовой тележки и способу ее катания по мосту - с опорной тележкой; с подвесной тележкой (обычно электроталью);
по расположению привода механизмов подъема и передвижения грузовой тележки – со стационарным размещением лебедок на мосту; с размещением на платформе грузовой тележки.
Кабина козлового крана может быть подвижной (в этом случае она подвешивается к грузовой тележке и перемещается вместе с ней) и неподвижной (обычно - у кранов небольшой грузоподъемности и с небольшим пролетом).