

4.2. Виконання роботи
№ вар |
A |
B |
13 |
–0,9 |
1 |
4.2.1. Виконаємо чисельне інтегрування диференційного рівняння (ДР)
|
|
|

за формулою прямокутників (коефіцієнти ДР: A = –1; B = 1) для синусоїдальної вхідної дії та двох різних значень кроку інтегрування (S=1 та S=0,25).
Знімки екрану для відповідних дослідів знаходяться на рис. 4.5. - рис. 4.8.
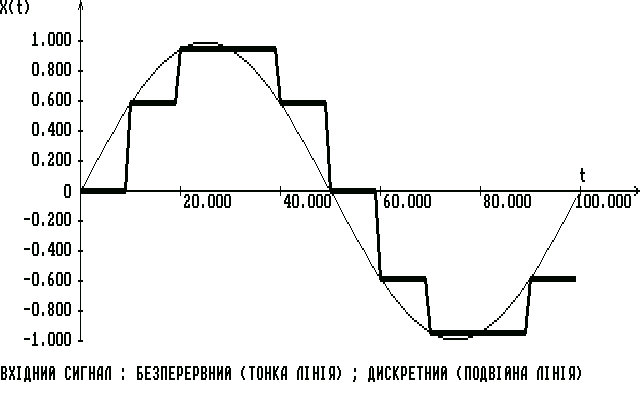
Рис. 4.5. Вхідний сигнал при S = 1

Рис. 4.6. Вихідний сигнал при S = 1

Рис. 4.7. Вхідний сигнал при S = 0,25

Рис. 4.8. Вихідний сигнал при S = 1
4.2.2. Визначимо швидкодію методів інтегрування (за графіками перехідного процесу).
Для цього виконаємо чисельне інтегрування ДР
|
|
(*) |

за всіма методами, реалізованими в програмі. Коефіцієнти A та B задамо згідно варіанту. Крок інтегрування задамо рівним 0,25.
Подамо на вхід одиничну ступінчату дію: x=1(t) та визначимо кількість кроків та час інтегрування, за який вихідна величина встановлюється в інтервалі
|
|
|
 ,
,
де
 –
встановлене значення після закінчення
перехідного процесу (для кожного ДР –
своє).
–
встановлене значення після закінчення
перехідного процесу (для кожного ДР –
своє).
Визначимо швидкодію за протабульованими значеннями вихідного сигналу моделі.
Результати занесемо в табл.4.2.
Таблиця 4.2
-
Метод
Похибка методу
Швидкодія методу
Кількість кроків
Час
Ейлера
0,135
60
15
Трапецій
0,124
70
17,5
Сімпсона
0,135
60
15
Модифікований Ейлера
0,122
70
17,5
Мілна
0,132
10
2,5
Адамса-Мултона
0,107
10
2,5
Рунге-Кутта четвертого порядку
0,154
70
17,5
Знімки екрану для відповідних дослідів знаходяться на рис. 4.9. - рис. 4.16.

Рис. 4.9. Вхідний одиничний ступінчатий сигнал

Рис. 4.10. Вихідні сигнали об’єкта та моделі для методу Ейлера

Рис. 4.11. Вихідні сигнали об’єкта та моделі для методу трапецій
Рис. 4.12. Вихідні сигнали об’єкта та моделі для методу Сімпсона

Рис. 4.13. Вихідні сигнали об’єкта та моделі для методу модифікований Ейлера

Рис. 4.14. Вихідні сигнали об’єкта та моделі для методу Мілна

Рис. 4.15. Вихідні сигнали об’єкта та моделі для методу Адамса-Мултона

Рис. 4.16. Вихідні сигнали об’єкта та моделі для методу Рунге-Кутта четвертого порядку
4.2.3. Визначимо точність методів інтегрування (за графіками перехідного процесу). Для цього виконаємо чисельне інтегрування ДР (*) за всіма методами, реалізованими в програмі. Коефіцієнти A та B задамо згідно варіанту. Крок інтегрування задамо рівним 0,25.
Подамо на вхід синусоїдальний сигнал: x=sin(t) та визначимо похибку обчислення реакції моделі ОК, що описується заданим ДР (*), як усереднений квадрат відхилень сигналів ОК та моделі, взятих за N = 10 точками :
|
|
|
 ,
,де y*(ti) – вихідна реакція моделі ОК на вхідну дію x(t); x*(t) – вихідна реакція ОК на вхідну дію x(t).
Розраховані значення середнього квадрату відхилень також занесемо в табл. 4.2.
Знімки екрану для відповідних дослідів знаходяться на рис. 4.9. - рис. 4.16.
Рис. 4.17. Вхідний синусоїдальний сигнал

Рис. 4.18. Вихідні сигнали об’єкта та моделі для методу Ейлера

Рис. 4.19. Вихідні сигнали об’єкта та моделі для методу трапецій
Рис. 4.20. Вихідні сигнали об’єкта та моделі для методу Сімпсона

Рис. 4.21. Вихідні сигнали об’єкта та моделі для методу модифікований Ейлера

Рис. 4.22. Вихідні сигнали об’єкта та моделі для методу Мілна

Рис. 4.23. Вихідні сигнали об’єкта та моделі для методу Адамса-Мултона

Рис. 4.24. Вихідні сигнали об’єкта та моделі для методу Рунге-Кутта четвертого порядку