

Рассмотрим атт массы м, закрепленное в точке о подпятником, а в точке в – подшипником (рис. 52).

Рис. 52
Пусть при этом
ОВ=![]() .
Введем неизменно связанную с АТТ систему
координат Охyz с осью Оz,
которая направлена по оси вращения АТТ,
и плоскостью уОz, проведенной через
центр масс С.
.
Введем неизменно связанную с АТТ систему
координат Охyz с осью Оz,
которая направлена по оси вращения АТТ,
и плоскостью уОz, проведенной через
центр масс С.
При действии на
АТТ ударного импульса
![]() возникают реактивные ударные импульсы
возникают реактивные ударные импульсы
![]() и
и
![]() .
При этом реактивный ударный импульс в
точке О может быть разложен на три
составляющие
.
При этом реактивный ударный импульс в
точке О может быть разложен на три
составляющие
![]() ,
,![]() ,
,![]() ,
а в точке В – на две составляющие
,
а в точке В – на две составляющие
![]() ,
,![]() .
.
Для определения этих пяти неизвестных воспользуемся теоремами о движении центра масс СМТ (8.11) и об изменении кинетического момента СМТ (8.13) при ударе в проекциях на оси декартовой системы координат.
Так как АТТ за
время удара перемещается бесконечно
мало, то векторы
![]() будут параллельны оси Оx и, следовательно,
будут параллельны оси Оx и, следовательно,
![]()
где yC – расстояние центра масс АТТ от оси вращения z , а 0 и – угловые скорости АТТ соответственно до и после удара.
Учитывая, что в данном случае , а , из формулы
получим:
![]()
Проектируя соотношение

На оси декартовой системы координат Oxyz, получим проекции кинетического момента атт до удара на эти оси:
![]()
Аналогично для проекций кинетического момента АТТ после удара на оси декартовой системы координат получим:
![]()
Подставим все эти значения в уравнения (8.11) и (8.13):
 (8.22)
(8.22)
где
![]() – моменты ударного импульса относительно
осей декартовой системы координат.
– моменты ударного импульса относительно
осей декартовой системы координат.
Из
первых пяти уравнений (8.22) могут быть
найдены пять неизвестных реактивных
импульсов
![]() ,
,![]() ,
,![]() ,
,![]() ,
,![]() .
Из шестого уравнения (8.22) определяется
изменение угловой скорости АТТ (
– 0),
вращающегося вокруг неподвижной оси
при ударе.
.
Из шестого уравнения (8.22) определяется
изменение угловой скорости АТТ (
– 0),
вращающегося вокруг неподвижной оси
при ударе.
8.10. Условия отсутствия ударных реактивных импульсов атт, вращающегося относительно неподвижной оси
Найдем условия отсутствия ударных реактивных импульсов.
Для этого в первых пяти уравнениях (8.22) положим их равными нулю. Тогда уравнения (8.22) примут вид:
 (8.23)
(8.23)
Из второго и третьего уравнений (8.23) следует, что для отсутствия ударных реактивных импульсов необходимо, чтобы приложенный ударный импульс был направлен параллельно оси Оx, то есть перпендикулярно плоскости yОz, которая проходит через ось вращения и центр масс АТТ (рис. 53).
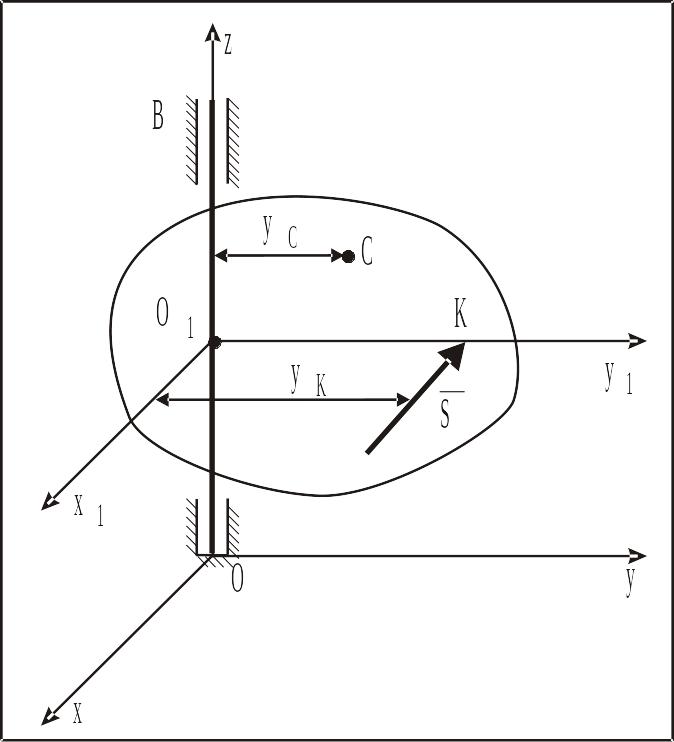
Рис. 53
Так
как систему координат можно выбрать
произвольно, то выберем ее такой, чтобы
ударный импульс
лежал в координатной плоскости x1O1y1
(точка О1
расположена на оси вращения z). Тогда,
направив
согласно условиям
![]() параллельно оси O1x1,
получим:
параллельно оси O1x1,
получим:
![]()
В результате четвертое и пятое из уравнений (8.23) дадут следующие условия:
![]() ,
,
то есть ось вращения z для точки О1 должна быть главной осью инерции.
Следовательно, для отсутствия ударных реактивных импульсов необходимо расположить ударный импульс в плоскости x1O1y1, проходящей через точку О1, для которой ось z является главной осью инерции.
Первое соотношение (8.23) примет вид:
![]() (8.24)
(8.24)
Так
как в рассматриваемом случае
![]() ,
где
,
где
![]() – кратчайшее
расстояние линии действия ударного
импульса
от оси вращения z, то шестое соотношение
формулы (8.22) примет вид:
– кратчайшее
расстояние линии действия ударного
импульса
от оси вращения z, то шестое соотношение
формулы (8.22) примет вид:
![]() .
(8.25)
.
(8.25)
Из
уравнений (8.24) и (8.25) найдем после
исключения разности
![]() следующее соотношение:
следующее соотношение:
![]() (8.26)
(8.26)
Таким образом, уравнение (8.24) будет иметь место при любой численной величине ударного импульса , если линия действия этого импульса будет проходить через точку К, которая отстоит от оси вращения z на расстоянии yК, определяемом формулой (8.26).
Условиями отсутствия ударных реактивных импульсов АТТ, вращающегося вокруг неподвижной оси, являются:
![]() ударный
импульс должен быть перпендикулярен
плоскости, проходящей через ось вращения
z и центр масс АТТ;
ударный
импульс должен быть перпендикулярен
плоскости, проходящей через ось вращения
z и центр масс АТТ;
ударный импульс должен быть расположен в плоскости, перпендикулярной оси z и проходящей через точку О1 АТТ, для которой ось z является главной осью инерции;
точка приложения К ударного импульса должна находиться от оси z на расстоянии, определяемом формулой (8.26) (точку К, через которую при этом проходит линия действия ударного импульса, не вызывающего ударных реакций в точках закрепления оси, называют центром удара).
В
частном случае, если центр масс АТТ
находится на оси вращения, т. е.
![]() ,
то из формулы (8.26) следует
,
то из формулы (8.26) следует
![]() .
То есть в этом случае нельзя добиться
отсутствия ударных реактивных импульсов.
Так как дополнительные динамические
реакции АТТ, вращающегося вокруг
неподвижной оси (глава 5) , могут
отсутствовать только в случае, если ось
вращения является центральной (
),
то добиться одновременно отсутствия
дополнительных динамических реакций
и ударных реактивных импульсов АТТ,
вращающегося вокруг неподвижной оси
при ударе, невозможно.
.
То есть в этом случае нельзя добиться
отсутствия ударных реактивных импульсов.
Так как дополнительные динамические
реакции АТТ, вращающегося вокруг
неподвижной оси (глава 5) , могут
отсутствовать только в случае, если ось
вращения является центральной (
),
то добиться одновременно отсутствия
дополнительных динамических реакций
и ударных реактивных импульсов АТТ,
вращающегося вокруг неподвижной оси
при ударе, невозможно.
Заключение
Алгоритм динамики – управляющий
Д00 УПР с комментариями

Комментарии
К.2. Вводятся для рассматриваемых объектов абстрактные понятия МТ, СМТ, МС, НМС и АТТ.
К.3. Определяется n – число МТ или n – число МТ, НМС, АТТ, входящих в СМТ.
К.4-6. Начинается изучение динамики с рассмотрения движения МТ.
Определяются, используя четыре основных закона динамики, дифференциальные уравнения движения свободной и несвободной МТ, три теоремы динамики МТ и принцип Даламбера для МТ.
К.7. Рассматриваются алгоритм решения первой и второй задач динамики МТ и движение МТ в неинерциальной системе отсчета – относительное движение МТ.
К.8-9. Определяются, используя основные законы динамики и основные понятия динамики СМТ, дифференциальные уравнения движения СМТ, четыре теоремы динамики СМТ и принцип Даламбера для СМТ.
К.10. Рассматриваются алгоритмы решения задач с помощью четырех теорем динамики СМТ и принципа Даламбера для СМТ, приводятся комментарии к алгоритмам и примеры их использования.
К.11. Используются четыре теоремы динамики СМТ при рассмотрении динамики НМС, динамики МТ переменной массы и элементов теории удара.
К.12. В курсе теоретической механики раздел "Динамика" по существу связывает два предыдущих раздела – "Статика" и "Кинематика". Используются методы статики сложения сил и приведения различных систем сил к простейшему виду и методы кинематики в части, касающейся установления способов задания движения материальных объектов и определения их основных кинематических параметров движения.
В разделе "Динамика" решаются две основные задачи:
Первая задача (прямая) динамики заключается в том, чтобы, зная механическое движение определенного материального тела (его уравнения или кинематические параметры движения) представляя его в том или ином абстрактном образе (МТ, СМТ, МС, НМС, АТТ), найти силы, вызывающие это движение.
Вторая задача (обратная) заключается в том, чтобы, зная силы, приложенные к определенному материальному телу, представляя его в том или ином абстрактном образе (МТ, СМТ, МС, НМС, АТТ), найти механическое движение этого тела (его уравнения или кинематические параметры движения).
Классическая механика, основанная на законах Исаака Ньютона, не потеряла своего значения в современном мире, о чем говорил Альберт Эйнштейн: "Ньютон, прости меня! В твое время ты нашел тот единственный путь, который был пределом возможного для человека величайшего ума и творческой силы... Пусть никто не думает, что великое создание Ньютона может быть ниспровергнуто теорией относительности или какой-либо другой теорией. Ясные и широкие идеи Ньютона навечно сохранят свое значение фундамента, на котором построены наши современные физические представления".