12. Компоновочные схемы манипуляторов пр
На этапе общей компоновки манипуляторов выбирают количество, вид и взаимное расположение его степеней подвижности.
С компоновкой манипулятора прежде всего связаны следующие его эксплуатационные характеристики:
- форма расположения и размеры рабочего пространства и рабочей зоны.
Рабочее пространство - та часть объёма, которую занимает сам ПР и в которой не могут находится остальные части технологического оборудования и строительные конструкции.
- перемещение рабочего органа между точками рабочей зоны осуществляется переносными степенями подвижности манипулятора, а ориентация рабочего органа – ориентирующими степенями подвижности.
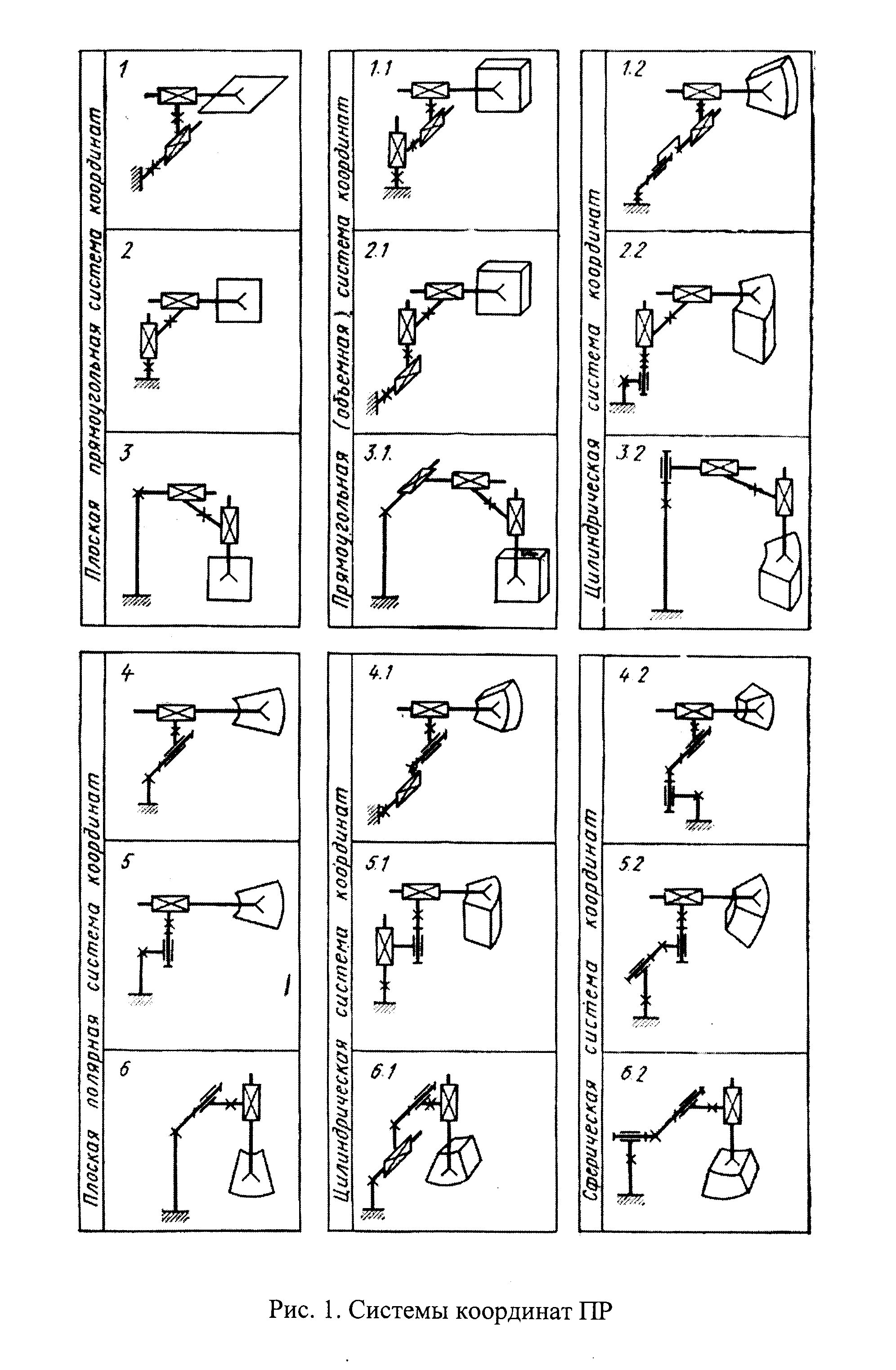
На рисунке приведены примеры наиболее распространенных обобщенных компоновочных кинематических схем ПР. Ориентирующие степени условно опущены.
По виду систем координат различают:
1) Работающие в плоской системе координат (схемы 1, 2, 3) - содержат 2 взаимно перпендикулярные поступательные степени подвижности
2) Работающие в плоской полярной системе координат (схемы 4, 5, 6) - содержат 2 взаимно перпендикулярные вращательную и поступательную степени подвижности, причем вращательная степень подвижно соединена с неподвижным основанием и производит поворот поступательно.
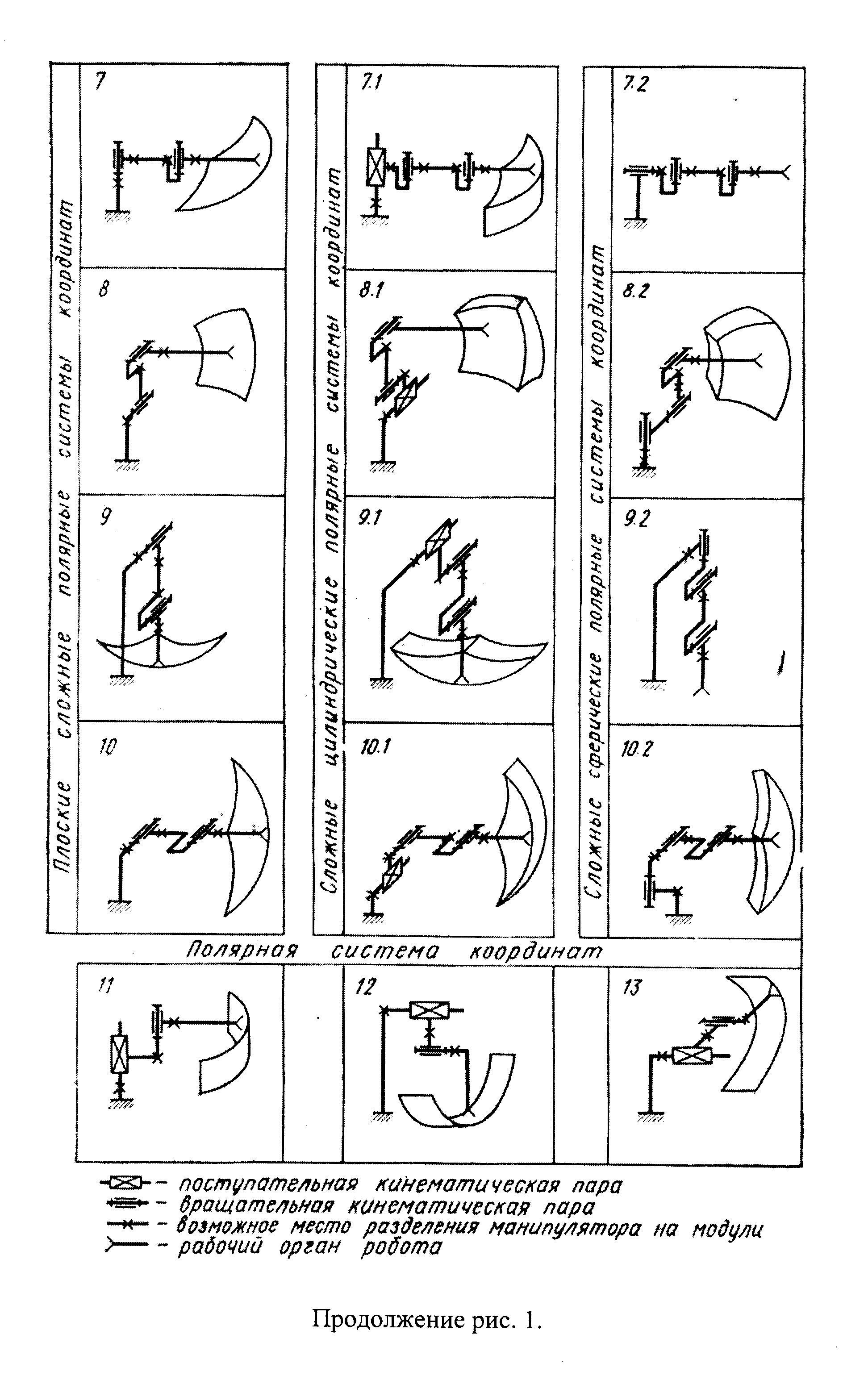
3) Работающие в плоской сложной полярной системе координат (схемы 7, 8, 9, 10) - содержат 2 вращательные степени подвижности с параллельными осями.
4) Работающие в полярной системе координат (схемы 11, 12, 13) с рабочей зоной в виде цилиндрической поверхности, содержат поступательную и вращательную степени подвижности. Поступательная степень подвижности установлена на неподвижном основании.
5) Работающие в прямоугольной, объемной системе координат (Схемы 1.1, 2.1, 3.1) - содержат 3 поступательные степени подвижности.
6) Работающие в цилиндрической системе координат (Схемы 1.2, 2.2, 3.2, 4.1, 5.1, 6.1)
Содержат 1 вращательную и 2 взаимно перпендикулярные поступательные степени подвижности.
7) Работающие в сложной цилиндрической полярной системе координат (Схемы 7.1, 8.1, 9.1, 10.1) - 1 поступательная и 2 вращательные степени подвижности
8) Работающие в сферической полярной системе координат (Схемы 4.2, 5.2, 6.2) - 2 вращательные степени подвижности и 1 поступательная со взаимно перпендикулярными осями.
9) Работающие в сложной сферической полярной системе координат (Схемы 7.2, 8.2, 9.2, 10.2) - 3 вращательные степени подвижности, оси двух из которых параллельны, а ось третьей перпендикулярна им.
Манипуляторы работающие в сложных плоских полярных, а так же в сложных цилиндрических и сферических системах координат иногда называют ангулярными.