

1.3.2. Ускорение точки при координатном способе задания ее движения
На основании (1.20) и (1.3) формула для определения ускорения
примет вид (рис.1.2)
![]() =
=
![]()
+
+
![]()
+
+
![]()
, (1.21)
, (1.21)
а проекции ускорения на оси декартовой системы координат будут
![]()
![]() ,
,![]()
![]() =
=![]() ,
,
![]()
![]() =
=
![]() ,(1.22)
,(1.22)
где составляющие ускорения, параллельные
осям координат, определяются как
![]() ,
,
![]()
,
,
![]()
,
а численное значение (модуль) ускорения
определяется по формуле
,
а численное значение (модуль) ускорения
определяется по формуле
![]() . (1.23)
. (1.23)
Направление
вектора
![]() определяется значением направляющих
косинусов углов, которые составляет
этот вектор с осями декартовой системы
координат:
определяется значением направляющих
косинусов углов, которые составляет
этот вектор с осями декартовой системы
координат:
![]() ,
,
![]() ,
,
![]() .
(1.24)
.
(1.24)
Здесь , , углы, которые составляет вектор с осями Ox, Oy и
Oz соответственно.
Понятие о сопровождающем (естественном) трехграннике
П режде
чем находить ускорение при траекторном
(естественном) способе задания движения
точки, введем понятие о сопровождающем
трехграннике, определим оси
естественной системы координат и ее
вектор
режде
чем находить ускорение при траекторном
(естественном) способе задания движения
точки, введем понятие о сопровождающем
трехграннике, определим оси
естественной системы координат и ее
вектор
Рис.1.10
ный базис, т.е. систему трех единичных векторов, задающих положительное направление этих осей (рис.1.10).
Первая ось траекторной системы координат ось касательная к кривой (траектории) в данной точке М, положительное направление которой следует принимать в соответствии с выбранным положительным направлением (движения точки по траектории) траекторной координаты s;
обозначается
![]() .
.
Единичный вектор
![]() всегда направлен по касательной к
траектории в соответствии с выбранным
положительным направлением траекторной
координаты s и
модуль его равен
всегда направлен по касательной к
траектории в соответствии с выбранным
положительным направлением траекторной
координаты s и
модуль его равен
![]() =1.
=1.
Вторая ось естественной системы
координат нормальная
ось (нормаль), расположена в
соприкасающейся плоскости,
перпендикулярна касательной к траектории
в точке и направлена в сторону вогнутости
траектории движения точки, обозначается
![]() .
.
 Здесь
следует напомнить некоторые сведения
из дифференциальной геометрии.
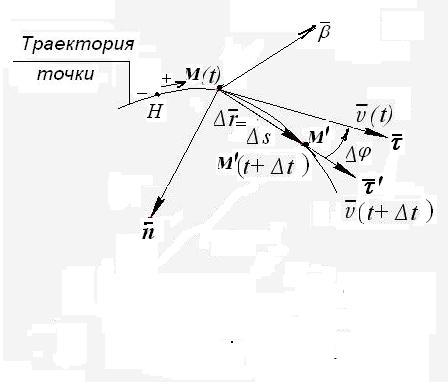
Если откладывать касательные к траектории
Здесь
следует напомнить некоторые сведения
из дифференциальной геометрии.
Если откладывать касательные к траектории
![]() и
и
![]() в текущие моменты времени (рис.1.11), то
очевидно, что приращение траекторной
координаты за время
=
в текущие моменты времени (рис.1.11), то
очевидно, что приращение траекторной
координаты за время
=
![]() составит
составит
![]() =
=
![]() ,
а касательная к траек
,
а касательная к траек
Рис.1.11
тории за это же время
повернется на угол смежности
![]()
![]() .
.
Отношение этих приращений за рассматриваемый промежуток времени определяет среднюю кривизну траектории
![]() .
(1.25)
.
(1.25)
Предел этого отношения, когда приращение
траекторной координаты, т.е. расстояние
между двумя близлежащими точками М
и М’ траектории
стремится к нулю, есть производная от
![]() по скалярному аргументу s
по скалярному аргументу s
равен кривизне траектории в данной точке:
 (1.26)
(1.26)
где
![]() радиус кривизны
траектории в данной точке.
радиус кривизны
траектории в данной точке.
Кроме того, следует учесть, что производная от единичного вектора по скалярному аргументу s есть вектор, перпендикулярный и направлен по нормали к касательной траектории движения точки в сторону ее вогнутости.
Без вывода приводим нужную в дальнейшем зависимость
![]() (1.27):
(1.27):
Единичный вектор
![]() ,
задает положительное направление
нормальной оси и равен
,
задает положительное направление
нормальной оси и равен
![]() =1.
Вектор
=1.
Вектор
![]() лежит в соприкасающейся плоскости,
перпендикулярен касательной и направлен
в сторону вогнутости траектории к центру
ее кривизны в данной точке.
лежит в соприкасающейся плоскости,
перпендикулярен касательной и направлен
в сторону вогнутости траектории к центру
ее кривизны в данной точке.
Третья ось естественной системы координат называется бинормальной осью (бинормалью), обозначается. Она перпендикулярна к касательной и нормальной осям, а ее положительное направление совпадает с
единичным вектором бинормали![]() ,
который определяется как результат
векторного произведения единичных
векторов
и
в виде
,
который определяется как результат
векторного произведения единичных
векторов
и
в виде
![]() (1.28)
(1.28)
Таким
образом, векторный базис
,
и
![]()
![]() определяют положительное направление
соответствующих координатных осей в
каждой точке траектории. Оси естественной
системы координат: касательная
,
нормаль
и бинормаль
определяют положительное направление
соответствующих координатных осей в
каждой точке траектории. Оси естественной
системы координат: касательная
,
нормаль
и бинормаль ![]() ,
построенные в точке M
траектории,
образуют естественный трехгранник.
При движении точки M
по своей траектории естественный
трехгранник с вершиной в точке M
также движется и ориентация его граней
и осей, их образующих, изменяется в
пространстве.
,
построенные в точке M
траектории,
образуют естественный трехгранник.
При движении точки M
по своей траектории естественный
трехгранник с вершиной в точке M
также движется и ориентация его граней
и осей, их образующих, изменяется в
пространстве.