

4.3.2. Указания и план выполнения
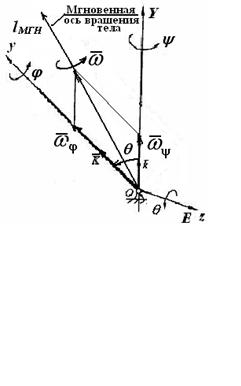
Случай регулярной прецессии – это такое вращение твердого тела вокруг неподвижной точки, при котором (рис.4.3.2) во все время движения остаются постоянными:
угол нутации
 ,
поэтому
,
поэтому
 ;
;
угловые скорости прецессии, ротации
и мгновенная угловая скорость
![]()
![]()
Рис.4.3.2
угловое ускорение
![]() .
.
1. Найти неподвижную точку О
вращающегося тела, выбираемую за начало
отсчета неподвижной и связанной
координатных систем. Выбрать оси
прецессии
,
ротации
![]() ,
нутации
,
нутации
![]() (
(![]()
![]() или
).
или
).
2. Определить угловые скорости нутации
![]() ,
прецессии
,
прецессии![]() ,
ротации
,
ротации
![]() и мгновенную угловую скорость
и мгновенную угловую скорость
![]() и мгновенную ось вращения
и мгновенную ось вращения![]() .
.
В зависимости от задания движения твердого тела вектор можно определять двумя способами:
1) по ее составляющим
![]() ;
;
2) использовать мгновенную ось вращения
,
которую в дальнейшем будем для краткости
обозначать![]() .
По известной скорости
.
По известной скорости
![]() какой-либо точки М твердого
тела и положению оси
=
находят величину
:
какой-либо точки М твердого
тела и положению оси
=
находят величину
:
![]() ,
где
,
где
![]() –перпендикуляр,
опущенный из точки М на
ось
=
.
–перпендикуляр,
опущенный из точки М на
ось
=
.
3. Определить угловое ускорение
![]() твердого тела. В случае регулярной
прецессии
и является закрепленным в точке О
вектором, положительное направление
которого определяется как результат
векторного произведения.
твердого тела. В случае регулярной
прецессии
и является закрепленным в точке О
вектором, положительное направление
которого определяется как результат
векторного произведения.
4. Определить скорости произвольных
точек твердого тела по формуле Эйлера
![]() ,
величина которой
,
величина которой
![]() .
.
5. Определить
ускорения
произвольных
точек твердого тела по
формуле![]() ,
где
вектор осестремительного ускорения,
величина которого
,
где
вектор осестремительного ускорения,
величина которого
![]()
![]()
вектор вращательного ускорения, величина
которого
вектор вращательного ускорения, величина
которого
![]() .
.
Так как
всегда направлено от точки по радиусу
![]() к оси
,
можно не пользоваться векторной формой
для
.
Что же касается
к оси
,
можно не пользоваться векторной формой
для
.
Что же касается![]() ,
то его следует находить только по
векторной форме.
,
то его следует находить только по
векторной форме.
Поскольку при вращении тела около полюса вектор неколлинеарен , то и , вообще говоря, не являются перпендикулярными векторами, поэтому определение должно производиться после построения векторов на чертеже, и величина ускорения будет равна
![]() .
.
. Для точек, лежащих на оси ротации твердого тела, справедливы также следующие зависимости:
![]() и
и
![]() ,
где
,
где
![]() –
нормальное ускорение;
–
нормальное ускорение;
![]() –
касательное ускорение; при регулярной
прецессии
–
касательное ускорение; при регулярной
прецессии
![]() .
.
Все векторы, лежащие в плоскости OXY (плоскости чертежа), должны быть изображены в этой плоскости; направление же других векторов должно быть указано в тексте.
4.3.3. Примеры выполнения расчетно-графической работы к3 (регулярная прецессия)
Пример 1. Дано. Конус 1 с углом 2 = 60 при вершине (рис.4.6.3) катится по неподвижному конусу 2 с углом 2=120 при вершине без скольжения, обегая последний 120 раз в минуту, при этом вершина О конуса 1 остается неподвижной, а центр С его основания движется по окружности, расположенной в горизонтальной плоскости. Высота конуса 1 ОС=10 см.
Определить. 1. Угол нутации ,
угловые скорости нутации![]() ,
прецессии
,
прецессии
![]() ,
ротации
,
ротации
![]() и мгновенную угловую скорость
и мгновенную угловую скорость
![]() .
.
2. Угловое ускорение конуса
![]() .
.
3. Скорости точек А, В, С
![]()
4. Ускорения точек А, В, С ![]() (найти осестремительное
(найти осестремительное
![]() и вращательное
и вращательное
![]() ускорения
точки С).
ускорения
точки С).
Решение. Введем неподвижную систему координат OXYZ с началом в точке О конуса 1 (рис.4.3.3) . Поскольку конус 1 катится по неподвижному конусу 2 без скольжения, то скорости всех его точек, лежащих на образующей ОА, равны в данный момент времени нулю. Следовательно, мгновенная ось вращения конуса 1 совпадает с образующей ОА.
1.Угол нутации
![]() ,
поскольку с конца оси нутации
,
поскольку с конца оси нутации
ОЕ поворот от оси прецессии OY к оси ротации Oy кажется по часовой
стрелке;
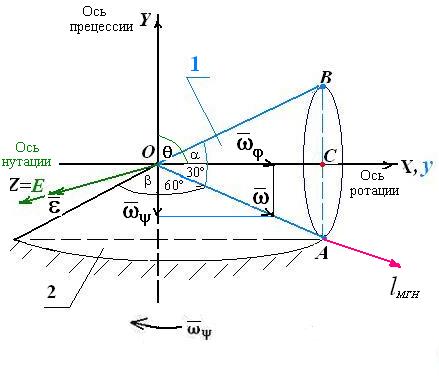 Рис.4.3.3.
Рис.4.3.3.
2. Величина угловой скорости прецессии
![]() .
.

Направление вектора
![]() определим в зависимости от задания
движения конуса 1,
в данном случае вращение конуса 1
вокруг оси прецессии происходит по
часовой стрелке, поэтому
определим в зависимости от задания
движения конуса 1,
в данном случае вращение конуса 1
вокруг оси прецессии происходит по
часовой стрелке, поэтому
![]() (оси прецессии).
(оси прецессии).
3. Векторное равенство![]() ,
в котором линии действия всех его
составляющих известны, позволяет
определить как направление векторов
всех составляющих угловых скоростей,
так и их величины а именно: линией
действия вектора
является мгновенная ось вращения
;
линией действия вектора
ось прецессии OY,
линией действия вектора
,
в котором линии действия всех его
составляющих известны, позволяет
определить как направление векторов
всех составляющих угловых скоростей,
так и их величины а именно: линией
действия вектора
является мгновенная ось вращения
;
линией действия вектора
ось прецессии OY,
линией действия вектора
![]() ось ротации Оy
(рис.4.3.3). Таким образом, величина
мгновенной угловой скорости
ось ротации Оy
(рис.4.3.3). Таким образом, величина
мгновенной угловой скорости
 ,
а величина угловой скорости ротации
,
а величина угловой скорости ротации

4. Угловое ускорение
в случае регулярной прецессии
определяется векторным произведением
![]() ,
т.е. вектор
,
т.е. вектор
![]() ,
так как с
конца оси OZ=ОЕ
поворот от
вектора
к вектору
кажется против хода часовой стрелки.
Величина углового ускорения
,
так как с
конца оси OZ=ОЕ
поворот от
вектора
к вектору
кажется против хода часовой стрелки.
Величина углового ускорения
![]() рад/с2 .
рад/с2 .
5. Скорости точек конуса 1 (рис.4.3.4)
5.1) точка А
![]() ,
так как в данный момент времени эта
точка принадлежит мгновенной оси
вращения конуса 1;
,
так как в данный момент времени эта
точка принадлежит мгновенной оси
вращения конуса 1;
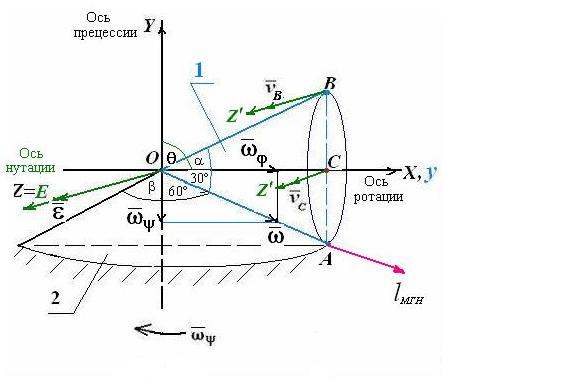 Рис.4.3.4
Рис.4.3.4
5.2) точка В
![]() ,
где
,
где
![]() ,
,
![]() и вектор
и вектор
![]()
![]() .
.
5.3) точка С I Траекторией точки С, с одной стороны, является окружность, плоскость которой перпендикулярна мгновенной оси вращения и центр которой лежит на , с другой стороны, – окружность, плоскость которой перпендикулярна оси прецессии ОY и центр которой лежит на этой оси. Поэтому
![]() , (I)
, (I)
где
![]() – кратчайшее расстояние от точки
С до мгновенной оси
;
– кратчайшее расстояние от точки
С до мгновенной оси
;
![]()
![]() =
=
![]()
. Вектор
![]()
![]() ,
так как направление вектора
совпадает с направлением мгновенной
оси
= ОА и вектор
направлен таким образом, чтобы с конца
этой оси
=
вращение конуса 1 казалось против хода
часовой стрелки (рис.4.3.4).
,
так как направление вектора
совпадает с направлением мгновенной
оси
= ОА и вектор
направлен таким образом, чтобы с конца
этой оси
=
вращение конуса 1 казалось против хода
часовой стрелки (рис.4.3.4).
II С другой стороны, поскольку точка С- центр основания конуса 1 движется по окружности, расположенной в горизонтальной плоскости, то
![]() , (II)
, (II)
где
![]() – кратчайшее расстояние от точки
С до оси ОY,
равное
– кратчайшее расстояние от точки
С до оси ОY,
равное
![]() ,
,
![]()
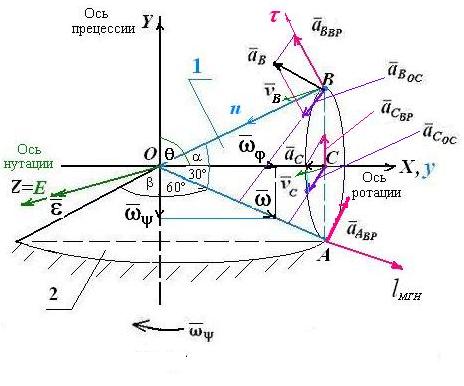
6. Ускорение какой-либо точки конуса 1 определим как геометрическую сумму осестремительного и вращательного ускорений (рис.4.3.5) .
6.1) точка А:
![]() ;
так как
;
так как
![]() ,
,
![]()
 где;
где;
![]() м.
м.
Вектор
![]() направлен перпендикулярно плоскости,
в которой лежат векторы
направлен перпендикулярно плоскости,
в которой лежат векторы
![]() и
и
![]() ,
т.е. перпендикулярно ОА в сторону
.
,
т.е. перпендикулярно ОА в сторону
.
Таким образом,
![]() ;
;![]()
 6.2)
точка В:
6.2)
точка В:
![]() ;
;
Рис.4.3.5
![]() ;
;
Вектор
![]() направлен от точки B
радиусу
направлен от точки B
радиусу
![]() к мгновенной оси
вращения конуса 1
(рис.4.3.5).
к мгновенной оси
вращения конуса 1
(рис.4.3.5).
 ,
где
,
где
![]() м.
м.
Вектор
![]() перпендикулярен плоскости, в которой
лежат векторы
и
перпендикулярен плоскости, в которой
лежат векторы
и
![]() ,
принадлежит плоскости ОXY,
т.е. направлен перпендикулярно ОB
в сторону
.
,
принадлежит плоскости ОXY,
т.е. направлен перпендикулярно ОB
в сторону
.
Полное ускорение точки B
найдем как диагональ прямоугольника,
построенного на векторах![]() :
:


6.3) точка С: I
![]() ;
;
![]()
![]() .
.
Вектор
![]() направлен от точки С по радиусу
направлен от точки С по радиусу
![]() к
мгновенной оси вращения кoнуса
1. Вектор
к
мгновенной оси вращения кoнуса
1. Вектор
![]() перпендикулярен
плоскости, в которой лежат векторы
и
перпендикулярен
плоскости, в которой лежат векторы
и
![]() ,
принадлежит плоскости ОXY,
т.е. направлен перпендикулярно ОС в
сторону
(рис.4.3.5);
,
принадлежит плоскости ОXY,
т.е. направлен перпендикулярно ОС в
сторону
(рис.4.3.5);
II![]() ;
;
![]()
![]()
Ответ. 1).
=- /2;
![]() =0;
=0;
![]() 1/с;
1/с;
![]() 1/с;
1/с;
![]() 1/с.
1/с.
2)
![]() 1/с2.
1/с2.
3).
![]() .
.
4)
![]()
![]()
![]()
![]() ;
;
![]() ;
;
![]() .
.
Пример 2 выполнения расчетно-графической работы К3
Дано. Конус 1 с углом 2=60
при вершине (рис. 4.3.6) катится без
скольжения по неподвижному конусу 2 с
углом 2=120
при вершине, при этом вершина О
конуса 1 остается неподвижной, а центр
С его основания движется по окружности,
расположенной в горизонтальной плоскости,
с постоянной скоростью
,
причем
![]()
![]() =3 м/с, ОА=ОВ=2м.
=3 м/с, ОА=ОВ=2м.
Определить. 1. Угол нутации,
угловую скорость нутации
,
прецессии
![]() ,
ротации
,
ротации
![]() ,
мгновенную угловую скорость
.
2. Угловое ускорение конуса
3. Скорости точек А и В
,
мгновенную угловую скорость
.
2. Угловое ускорение конуса
3. Скорости точек А и В
![]() ,
,
![]() 4. Ускорения точек А, В, С
4. Ускорения точек А, В, С
![]() ,
,
![]() ,
,
![]() ,
а также (найти осестремительное
,
а также (найти осестремительное
![]() и вращательное
и вращательное
![]() ускорения точки С).
ускорения точки С).
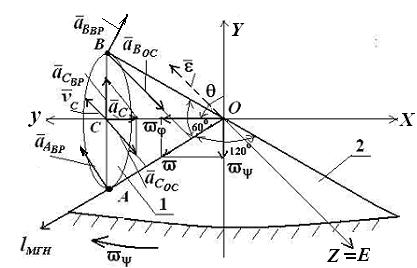
Рис. 4.3.6
Решение. Введем неподвижную систему координат OXYZ с началом в точке О конуса 1. Поскольку конус 1 катится по неподвижному конусу 2 без скольжения, то скорости всех его точек, лежащих на образующей ОА, равны в данный момент времени нулю. Следовательно, мгновенная ось вращения конуса 1 совпадает с образующей ОА.
2.1. Угол нутации
![]() ,
поскольку с конца оси нутации ОЕ
поворот от оси прецессии OY
к оси ротации Oy
кажется против часовой стрелки;
,
поскольку с конца оси нутации ОЕ
поворот от оси прецессии OY
к оси ротации Oy
кажется против часовой стрелки;
![]() .
.
2.2. Траекторией точки С, с одной стороны, является окружность, плоскость которой перпендикулярна мгновенной оси вращения и центр которой лежит на , с другой стороны, – окружность, плоскость которой перпендикулярна оси прецессии ОY и центр которой лежит на этой оси.
Установив положение мгновенной оси вращения, найдем модуль мгновенной угловой скорости конуса. Поскольку
![]() (I)
(I)
где
![]() – кратчайшее расстояние от точки
С до мгновенной оси
– кратчайшее расстояние от точки
С до мгновенной оси![]() ;
;
![]() ,
то
,
то
3,
![]() . Учитывая
заданное направление вектора
. Учитывая
заданное направление вектора![]() ,
,
![]() ,
отложим от точки О вдоль мгновенной
оси
= ОА вектор
так, чтобы видеть с его конца вращение
конуса вокруг этой оси
в направлении, противоположном направлению
движения часовой стрелки (рис. 4.3.6).
,
отложим от точки О вдоль мгновенной
оси
= ОА вектор
так, чтобы видеть с его конца вращение
конуса вокруг этой оси
в направлении, противоположном направлению
движения часовой стрелки (рис. 4.3.6).
С другой стороны, поскольку центр С основания конуса 1 движется по окружности, расположенной в горизонтальной плоскости, то
![]() (II)
(II)
где
– кратчайшее расстояние от точки
С до оси ОY,
равное
![]() .
.
Отсюда находим величину угловой скорости
прецессии
![]() :
:
![]() .
.
Направление вектора определим в зависимости от задания движения конуса 1, в данном случае вращение конуса 1 вокруг оси прецессии происходит по часовой стрелке, поэтому (оси прецессии).
2.3. Векторное равенство
,
в котором линии действия всех его
составляющих известны, позволяет
определить как направление векторов
всех составляющих угловых скоростей,
так и величину угловой скорости ротации,
а именно:
![]() ;
линией действия вектора
является мгновенная ось вращения
;
линией действия вектора
ось прецессии OY,
линией действия вектора
ось ротации Оy
(рис. 4.6). Таким образом, величина угловой
скорости ротации
;
линией действия вектора
является мгновенная ось вращения
;
линией действия вектора
ось прецессии OY,
линией действия вектора
ось ротации Оy
(рис. 4.6). Таким образом, величина угловой
скорости ротации
 .
.
2.4.
Угловое ускорение
в случае регулярной прецессии
определяется векторным произведением
![]() ,
т.е. вектор
,
так как с
конца оси OZ
поворот от
вектора
,
т.е. вектор
,
так как с
конца оси OZ
поворот от
вектора
![]() к вектору
кажется по ходу часовой стрелки; величина
углового ускорения
к вектору
кажется по ходу часовой стрелки; величина
углового ускорения
![]() рад/с2
.
рад/с2
.
2.5. Скорости точек конуса 1:
2.5.1) точка А
![]() ,
так как в данный момент времени эта
точка принадлежит мгновенной оси
вращения конуса 1;
,
так как в данный момент времени эта
точка принадлежит мгновенной оси
вращения конуса 1;
2.5.2)точка В
![]() ,
где
,
,
где
,
![]() и вектор
и вектор
![]()
![]() .
.
2.6. Ускорение какой-либо точки конуса 1 определим как геометрическую сумму осестремительного и вращательного ускорений.
2.6.1) точки А:
![]() ;
;![]() ;
;![]() ;
;
![]() ;
;![]() ,
,
где
![]() ;
;
![]() м.
м.
Вектор
![]() направлен перпендикулярно плоскости,
в которой лежат векторы
и
,
т.е. перпендикулярно ОА в сторону
.
направлен перпендикулярно плоскости,
в которой лежат векторы
и
,
т.е. перпендикулярно ОА в сторону
.
Таким образом,
;![]() .
.
2.6.2) точка В:
;![]() ;
;![]()
Вектор
![]() направлен от точки B
к мгновенной оси вращения конуса 1
(рис. 4 3.6). Вектор
направлен от точки B
к мгновенной оси вращения конуса 1
(рис. 4 3.6). Вектор
![]() перпендикулярен плоскости, в которой
лежат векторы
и
,
принадлежит плоскости ОXY,
т.е. направлен перпендикулярно ОB
в сторону
.
Величины этих векторов:
перпендикулярен плоскости, в которой
лежат векторы
и
,
принадлежит плоскости ОXY,
т.е. направлен перпендикулярно ОB
в сторону
.
Величины этих векторов:
![]() ;
;
![]() ,
где
,
где
![]() м.
м.
Полное ускорение точки B
найдем как диагональ прямоугольника,
построенного на векторах![]() :
:
 2.6.3)
точка С:
2.6.3)
точка С:
I)
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Вектор
направлен от точки С по радиусу
![]() к мгновенной оси вращения кoнуса
1.
к мгновенной оси вращения кoнуса
1.
Вектор перпендикулярен плоскости, в которой лежат векторы и , принадлежит плоскости ОXY, т.е. направлен перпендикулярно ОС в сторону (рис. 4.3.6);
II)![]() ;
;
![]()
Ответ. 1. Угол нутации
= /2; угловая скорость
нутации
;
прецессии
![]() 1/с;
ротации
1/с;
ротации
![]() 1/с;
мгновенная угловая скорость
1/с;
мгновенная угловая скорость
![]() 1/с.
1/с.
2. Угловое ускорение конуса 1/с2.
3. Скорости точек
А и В
![]() м/с.
4.Ускорения точек А, В, С
м/с.
4.Ускорения точек А, В, С
![]() /c2;
/c2;
осестремительное
ускорение точки С
:
![]() м/с2;
м/с2;
вращательное
ускорение точки С
:
![]() м/с2.
м/с2.
Пример 3 выполнения расчетно-графической работы К3
Дано. Конус 1 с углом 2
при вершине катится без скольжения по
неподвижному конусу 2 с углом 2
при вершине в направлении, указанном
стрелкой (рис.4.3.7). Высота конуса OC
= h. Вращательное
ускорение центра С основания конуса
![]() =0,48
м/с2, h=0,12 м,
2α = 120°,
=0,48
м/с2, h=0,12 м,
2α = 120°,
2β = 60°.
Определить. 1. Угол нутации ,
угловую скорость нутации
,
прецессии
,
ротации
и мгновенную угловую скорость
.
2. Угловое ускорение конуса
.
3. Скорости точек А, В, С:
![]() 4. Ускорения точек А, В, С:
4. Ускорения точек А, В, С:
![]() .
.
Решение. Введем неподвижную систему
координат OXYZ с
началом в точке О конуса 1.
Поскольку конус 1 катится по
неподвижному конусу 2 без скольжения,
то скорости всех его точек, лежащих на
образующей ОА, равны в данный момент
времени нулю. Следовательно, мгновенная
ось вращения
конус а
1 совпадает с образующей ОА.
а
1 совпадает с образующей ОА.
3.1.Угол нутации:
![]() ,
так как с конца оси нутации ОZ=OE
поворот от оси прецессии OY
к оси ротации Оy
кажется против часовой стрелки,
.
,
так как с конца оси нутации ОZ=OE
поворот от оси прецессии OY
к оси ротации Оy
кажется против часовой стрелки,
.
Рис.4.3.7
3.2. Направление вектора определяется в зависимости от задания движения конуса 1 вокруг оси прецессии OY, в данном случае – против часовой стрелки, поэтому ↑↑ .
3.3. Векторное равенство![]() ,
в котором линии действия всех его
составляющих известны, позволяет
определить как направление векторов
всех составляющих угловых скоростей,
так и величины угловых скоростей
прецессии и ротации через мгновенную
угловую скорость вращения
.
Так как линия действия вектора
– ось прецессии OY,
причем
↑↑
,
линией действия вектора
,
в котором линии действия всех его
составляющих известны, позволяет
определить как направление векторов
всех составляющих угловых скоростей,
так и величины угловых скоростей
прецессии и ротации через мгновенную
угловую скорость вращения
.
Так как линия действия вектора
– ось прецессии OY,
причем
↑↑
,
линией действия вектора![]() является мгновенная ось вращения
;
линией действия вектора
– ось ротации Оy,
то из векторного равенства
является мгновенная ось вращения
;
линией действия вектора
– ось ротации Оy,
то из векторного равенства
![]() следует, что
↑↑
,
а
↑↑
следует, что
↑↑
,
а
↑↑![]() ,
а величины угловых скоростей прецессии
и ротации равны
,
а величины угловых скоростей прецессии
и ротации равны
![]() 1/с = const,
1/с = const,
![]() 1/с
= const.
1/с
= const.
3.4.Угловое ускорение в случае регулярной прецессии определяется векторным произведением , т.е. вектор , так как с конца оси OZ поворот вектора к вектору кажется против хода часовой стрелки; величина углового ускорения
![]() 1/с2 .
1/с2 .
С другой стороны, по условию задачи
![]() ,
где,
,
где,
![]() ,
находим величину углового ускорения
,
находим величину углового ускорения
 .
Направление вектора
.
Направление вектора
![]() указано в условии. Вектор
лежит в плоскости (ВОА), перпендикулярен
плоскости, в которой лежат векторы
и
указано в условии. Вектор
лежит в плоскости (ВОА), перпендикулярен
плоскости, в которой лежат векторы
и
![]() ,
принадлежит плоскости ОXY,
т.е. направлен перпендикулярно ОС в
сторону
.
,
принадлежит плоскости ОXY,
т.е. направлен перпендикулярно ОС в
сторону
.
Таким образом, используя полученные
равенства
![]() ,
,
,
находим величины
,
,
,
находим величины
![]() 1/с,
1/с,
![]() 1/с,
1/с,
![]() 1/с.
1/с.
3.5. Скорости точек конуса 1:
3.5.1)точка А:
![]() ,
так как в данный момент времени эта
точка принадлежит мгновенной оси
вращения конуса 1;
,
так как в данный момент времени эта
точка принадлежит мгновенной оси
вращения конуса 1;
3.5.2) точка
В:
![]() ,
где
,
где
![]() (рис. 4.7),
(рис. 4.7),
![]()
![]() и вектор
и вектор
![]() ;
;
3.5.3) точка С. Траекторией точки С, с одной стороны, является окружность, плоскость которой перпендикулярна мгновенной оси вращения и центр которой лежит на , с другой стороны, – окружность, плоскость которой перпендикулярна оси прецессии ОY и центр которой лежит на этой оси. Поэтому скорость точки С конуса 1 можно определить по двум формулам:
I)
![]() ,
где
– кратчайшее расстояние от точки С
до мгновенной оси вращения
,
,
где
– кратчайшее расстояние от точки С
до мгновенной оси вращения
,
![]()
![]() ;
;
![]() ,
,
![]()
![]() .
.
С другой стороны, поскольку точка С центр основания конуса 1 движется по окружности, расположенной в горизонтальной плоскости, то
II)
![]() ,
где
,
где
![]() – кратчайшее расстояние от точки С
до оси ОY ,
– кратчайшее расстояние от точки С
до оси ОY ,
![]() ;
=
;
=![]() .
.
3.6. Ускорение какой-либо точки конуса 1 определим как геометрическую сумму осестремительного и вращательного ускорений.
3.6.1) точка А:
а) ; ; ;
![]() так как
так как
![]() ;
;
![]() ;
;
![]() .
.
Вектор
направлен перпендикулярно плоскости,
в которой лежат векторы
и
,
т.е. перпендикулярно ОА в сторону
.
Таким образом,
![]() м/с2.
м/с2.
3.6.2) точка В:
![]() ;
;
![]() ;
;
![]() .
.
Вектор
![]() направлен от точки B
по радиусу
направлен от точки B
по радиусу
![]() к мгновенной оси вращения
конуса 1. Вектор
к мгновенной оси вращения
конуса 1. Вектор
![]() перпендикулярен плоскости, в которой
лежат векторы
и
,
принадлежит плоскости ОXY,
т.е. направлен перпендикулярно ОB
в сторону
.
перпендикулярен плоскости, в которой
лежат векторы
и
,
принадлежит плоскости ОXY,
т.е. направлен перпендикулярно ОB
в сторону
.
![]()
![]() .
.
Полное ускорение точки B
найдем через его проекции на оси
дополнительной системы координат
![]() ,
лежащей в плоскости (BOA),
как
,
лежащей в плоскости (BOA),
как
![]() :
:
![]() м/с2;
м/с2;
![]() м/с2.
м/с2.
3.6.3) точка С:
I)
;
![]() ;
;
;
;
![]() м/с2;
м/с2;
![]() .
.
Вектор направлен от точки С по радиусу к мгновенной оси вращения конуса. Направление вектора указано в условии задачи. Вектор направлен перпендикулярно ОС в сторону ;
II)
![]()
![]()
Так как в данной задаче
![]() для контроля правильности решения
величину вектора
для контроля правильности решения
величину вектора
![]() можно получить как
можно получить как
![]()
![]() м/с2.
м/с2.
Ответ. 1. Угол нутации = /2;
угловая скорость нутации
![]() ;
угловые скорости прецессии
рад
/с; ротации
рад /с; мгновенная угловая скорость
;
угловые скорости прецессии
рад
/с; ротации
рад /с; мгновенная угловая скорость
![]() = 4 рад/с.
= 4 рад/с.
2. Угловое ускорение конуса
![]() рад/с2.
рад/с2.
3. Скорости точек
А, В,
С:
![]() =0;
=0;
![]() ;
;![]() м/с.
м/с.
4. Ускорения точек А, В, С:
![]() =
0,96
=
0,96![]() м/с2;
м/с2;
![]() =
4,4 м/с2;
=
4,4 м/с2;
![]() =
1,44 м/с2.
=
1,44 м/с2.
5. Осестремительное ускорение точки С:
![]() = 0,96
м/с2 ,
= 0,96
м/с2 ,
вращательное ускорение
![]() задано.
задано.