

1.6. Гироскоп
Если
тело вращается вокруг закреплённой
оси, то для характеристики его движения
необходимо знать только величину
–![]() проекцию
момента импульса этого тела на ось
вращения. В этом случае движение имеет
простой характер.
проекцию
момента импульса этого тела на ось
вращения. В этом случае движение имеет
простой характер.
Если же ось вращения не закреплена, то необходимо рассматривать весь вектор в зависимости от вектора угловой скорости .
В случае незакрепленной оси вращения направления векторов и могут и не совпадать.
Примером такого движения является вращение гироскопа. Гироскоп – осесимметричное тело, быстро вращающееся вокруг своей геометрической оси, причём ось вращения может свободно ориентироваться в пространстве.
В отсутствии внешних сил векторы и направлены по оси гироскопа (т.к. гироскоп симметричен относительно своей оси и нет никакого другого предпочтительного направления, куда бы мог быть направлен вектор ). В этом случае ось гироскопа сохраняет своё положение в пространстве.
Если
же к гироскопу приложить внешнюю силу,
то его ось начинает отклоняться. Это
движение оси гироскопа называется
прецессией. Движение оси гироскопа
происходит относительно некоторой
другой оси, не совпадающей с осью
гироскопа, поэтому и вектор суммарной
угловой скорости
не будет совпадать с геометрической
осью гироскопа. Значит, не будет совпадать
с осью гироскопа и вектор
![]() .
.
Если основное вращение гироскопа происходит с большой скоростью и внешние силы не слишком велики, скорость поворота оси гироскопа будет мала и векторы и будут близки по направлению к оси гироскопа, и по изменению вектора можно судить о движении оси гироскопа. Изменение же вектора определяется моментом приложенных к нему сил:
т. е. внешняя сила вызывает поворот оси гироскопа в направлении, перпендикулярном направлению силы.
Действительно, пусть к концам оси гироскопа приложена пара сил , действующих в плоскости yz (см. рис.1.6.1)
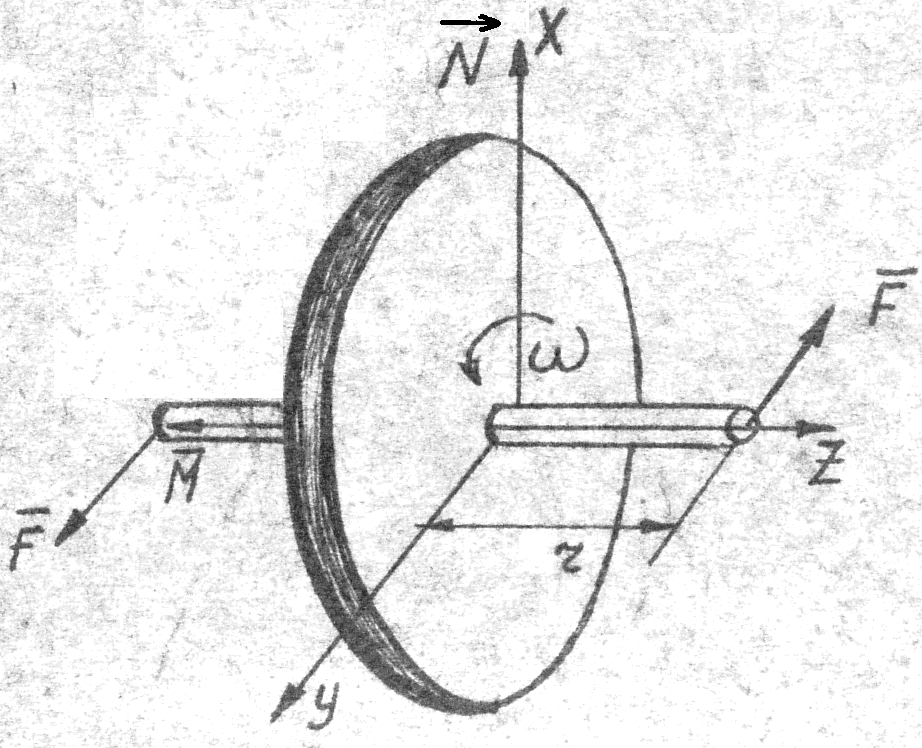
Рис.1.6.1
Момент
пары сил
 направлен перпендикулярно векторам
и
(причём вектор
направлен перпендикулярно векторам
и
(причём вектор
![]() направлен по оси z,
вектор
-
по оси y).
Таким образом, вектор
направлен по оси x,
и в эту же сторону направлена производная
направлен по оси z,
вектор
-
по оси y).
Таким образом, вектор
направлен по оси x,
и в эту же сторону направлена производная
![]() ,
т.е. момент импульса гироскопа и его ось
отклоняются в одну сторону по оси х.
За время
,
т.е. момент импульса гироскопа и его ось
отклоняются в одну сторону по оси х.
За время
![]() момент
импульса гироскопа получит приращение
момент
импульса гироскопа получит приращение
![]() ,
которое совпадает по направлению с
моментом силы
(см.
рис.1.6.2.).
,
которое совпадает по направлению с
моментом силы
(см.
рис.1.6.2.).

Рис.1.6.2
По этому результирующий момент импульса гироскопа равен:
![]() .
.
Направление
вектора
![]() совпадает с новым направлением оси
вращения гироскопа. Таким образом,
ось гироскопа повернётся вокруг оси y,
причём так, что угол между векторами
и
уменьшится.
совпадает с новым направлением оси
вращения гироскопа. Таким образом,
ось гироскопа повернётся вокруг оси y,
причём так, что угол между векторами
и
уменьшится.
Если на гироскоп действовать длительное время постоянным по направлению моментом внешних сил , то ось гироскопа устанавливается так, что ось и направление собственного вращения совпадают с осью и направлением вращения под действием внешних сил (вектор совпадает по направлению с вектором ).
Рассмотрим прецессию лабораторного гироскопа, в котором момент силы создаётся перемещением рейтера относительно центрального положения (см. рис.1.6.3.).
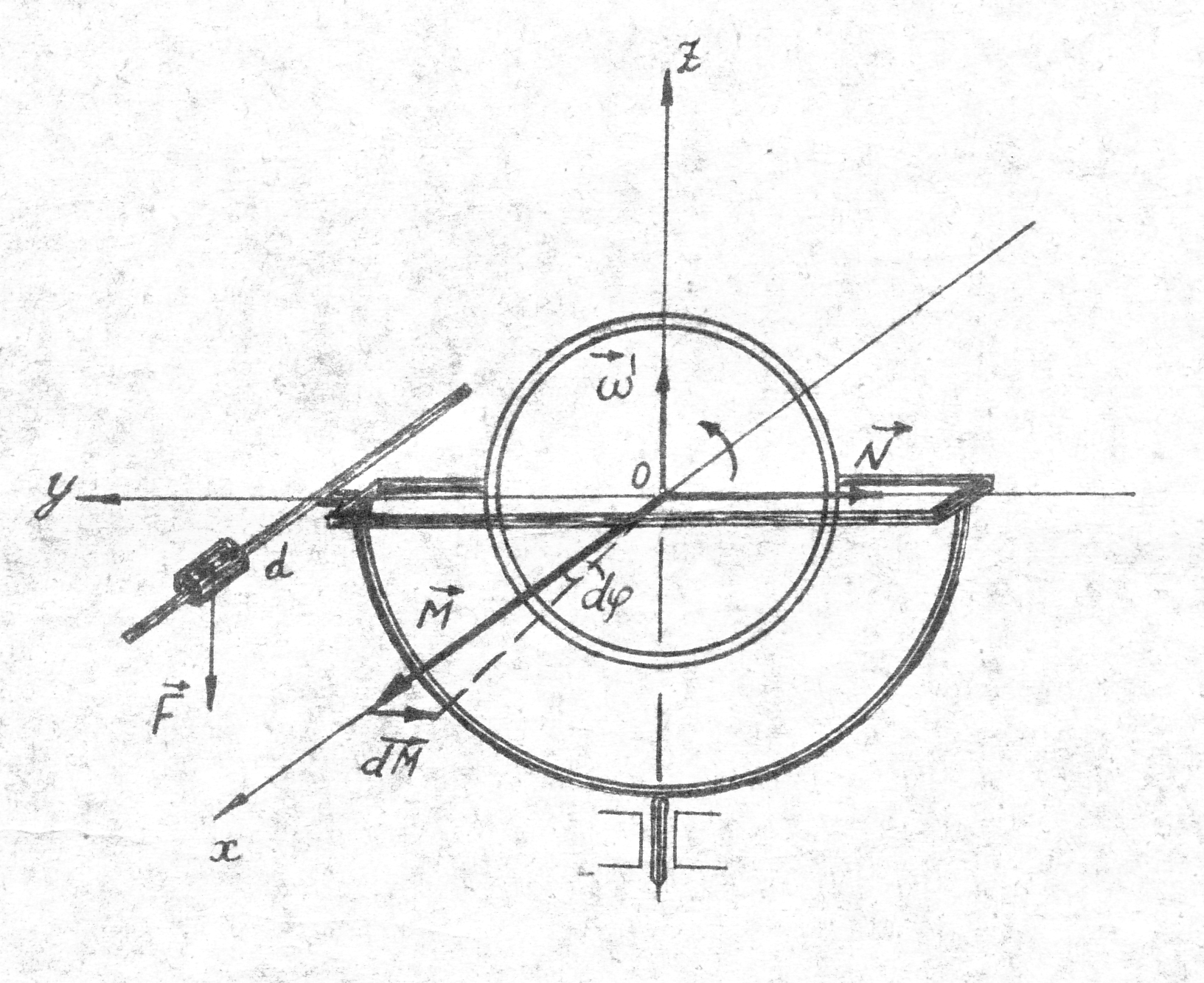
Рис. 1.6.3
В этом случае момент внешних сил постоянен по величине и поворачивается одновременно с осью гироскопа, образуя с ней всё время, прямой угол. Момент внешних сил, приложенных к гироскопу, равен по величине:
![]() ,
(1.6.1)
,
(1.6.1)
где m — масса рейтера, d – расстояние от центрального положения (на оси y) до центра масс рейтера.
Момент
силы
направлен перпендикулярно векторам
![]() и
и
![]() ,
следовательно, он направлен в
отрицательном направлении оси y.
Под действием момента сил
момент импульса
получит за время dt
приращение:
,
следовательно, он направлен в
отрицательном направлении оси y.
Под действием момента сил
момент импульса
получит за время dt
приращение:
![]() ,
,
которое
совпадает по направлению с вектором
,
т.е. перпендикулярное вектору
.
За время dt
ось гироскопа
повернётся на угол
![]() относительно оси z,
на такой же угол в горизонтальной
плоскости повернётся вектор
,
т.е. спустя dt
будем иметь
такое же взаимное расположение векторов
и
,
как и в начальный момент времени.
относительно оси z,
на такой же угол в горизонтальной
плоскости повернётся вектор
,
т.е. спустя dt
будем иметь
такое же взаимное расположение векторов
и
,
как и в начальный момент времени.
За
последующий промежуток времени dt
вектор
снова получит приращение
![]() ,
которое будет перпендикулярно к новому
(возникшего уже после первого элементарного
поворота) направлению вектора
и т.д. Таким образом, ось гироскопа
непрерывно поворачиваться вокруг
вертикали
,
которое будет перпендикулярно к новому
(возникшего уже после первого элементарного
поворота) направлению вектора
и т.д. Таким образом, ось гироскопа
непрерывно поворачиваться вокруг
вертикали
![]() .
При этом вектор
меняется по направлению, оставаясь
постоянным по величине.
.
При этом вектор
меняется по направлению, оставаясь
постоянным по величине.
Такое движение гироскопа называется прецессией и представляет собой движение его оси под действием внешних сил.
Угловая
скорость вращения плоскости, проходящей
через вертикаль
![]() и ось гироскопа, называется скоростью
прецессией:
и ось гироскопа, называется скоростью
прецессией:
![]() , (1.6.2.)
, (1.6.2.)
где
![]() -
угол, на который повернётся эта плоскость
за время dt.
-
угол, на который повернётся эта плоскость
за время dt.
Видно, что
![]() или
или
![]() .
.
Угол
мал, поэтому
![]() ,
тогда
,
тогда
![]() .
(1.6.3.)
.
(1.6.3.)
Согласно (1.6.2.) и (1.6.3.), получим:
![]() .
(1.6.4.)
.
(1.6.4.)
Угловая скорость прецессии от угла наклона оси гироскопа не зависит.