

1.3.2 Синхронные двигатели с постоянными магнитами
Ротор маломощных синхронных двигателей обычно выполняется на постоянных магнитах. Синхронный двигатель с постоянными магнитами, благодаря своим высоким эксплуатационным характеристикам, является наиболее перспективной машиной в диапазоне малых и средних мощностей. СДПМ простой по конструкции, не имеет потерь на возбуждение и обладает высокой стабильностью скорости ротора. Эти качества выделяют его из ряда всех остальных машин и обеспечивают ему применение в системах автоматики, приводах подачи станков, прецизионных системах слежения, а также системах, где стабильность скорости является первостепенным требованием, предъявляемым к технологическому процессу.
Принцип работы СДПМ основан на взаимодействии вращающегося поля обмотки статора с полем постоянных магнитов, расположенных на роторе. Если числа пар полюсов статора и ротора равны, а скорости вращения полей одинаковы (синхронный режим), то возникает постоянное электромагнитное притяжение разноименных полюсов статора и ротора (рисунок 5), что вызывает появление электромагнитного момента. Этот момент называемый синхронным, в среднем равен нулю, если скорость ротора отлична от синхронной. Поэтому синхронный двигатель только с постоянными магнитами не имеет пускового момента. Для пуска двигателя на роторе устраивают короткозамкнутую обмотку типа беличьей клетки, с помощью которой ротор двигателя разгоняется до скорости, близкой к синхронной, и под действием синхронного момента входит в синхронизм.

Рисунок 5 Принципиальная схема СДПМ
Таким образом, ротор двигателя должен сочетать в себе элементы синхронного двигателя (постоянные магниты) и асинхронного (короткозамкнутую обмотку). Статор СДПМ ничем не отличается от статоров обычных асинхронных машин переменного тока: их пакеты набираются из изолированных листов электротехнической стали, а в пазах укладывается трехфазная или двухфазная обмотка.
1.3.3 Широтно-импульсная модуляция
При регулировании скорости вращения двигателя с помощью широтно-импульсной модуляции (ШИМ, в англоязычных текстах - PWM, pulse-width modulation) на двигатель подается полное напряжение питание, но регулируется время, в течение которого оно подается.
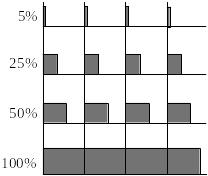
Рисунок 6 Широтно-импульсная модуляция
Условно говоря, мы нажимаем на кнопку питания двигателя каждую секунду, но если нам нужно только 25% мощности двигателя, то мы удерживаем кнопку нажатой всего четверть секунды, а если 50% мощности - то полсекунды. Когда же нам нужна от двигателя полная мощность, мы держим кнопку нажатой полную секунду (то есть фактически ее просто не отпускаем).
Конечно же, в большинстве реальных случаев питание подается на двигатель с частотой много выше, чем один раз в секунду, но принцип остается тем же. Кроме времени, в течении которого подается питание на двигатель, можно регулировать также и период подачи питания.
То, что с помощью дискретного сигнала ("включено/выключено") можно управлять аналоговой величиной (частотой вращения двигателя), делает этот способ очень популярным при использовании цифровых схем управления и, в частности, микроконтроллеров.
Обычно частота ШИМ бывает довольно высока и составляет от нескольких десятков до нескольких сотен герц. В этом случае при емкостной нагрузке происходит сглаживание пульсаций питающего напряжения и фактически мы подаем на двигатель некоторое эффективное напряжение. Скажем, при напряжении питания 10В и длительности импульса 50% от периода, мы получим точно такой же результат, как если бы просто подали на двигатель напряжение 5В. Часто именно это и требуется. Более того, это один из наиболее популярных способов регулирования аналогового напряжения в цифровых схемах.
Большинство современных контроллеров имеют встроенные средства для организации ШИМ.