

Электромагнитный момент и механические характеристики асинхронного двигателя
Электромагнитный момент асинхронного двигателя создается взаимодействием тока в обмотке ротора с вращающимся магнитным полем. Электромагнитный момент М пропорционален электромагнитной мощности:
 ,
,
где:
 .
.
– угловая синхронная скорость вращения.
Подставив в значение электромагнитной мощности по, получим
 ,
,
т. е. электромагнитный момент асинхронного двигателя пропорционален мощности электрических потерь в обмотке ротора.
Упрощенно механическую характеристику можно рассчитать по уравнению Клосса:

Зависимость момента от скольжения называется механической характеристикой ад
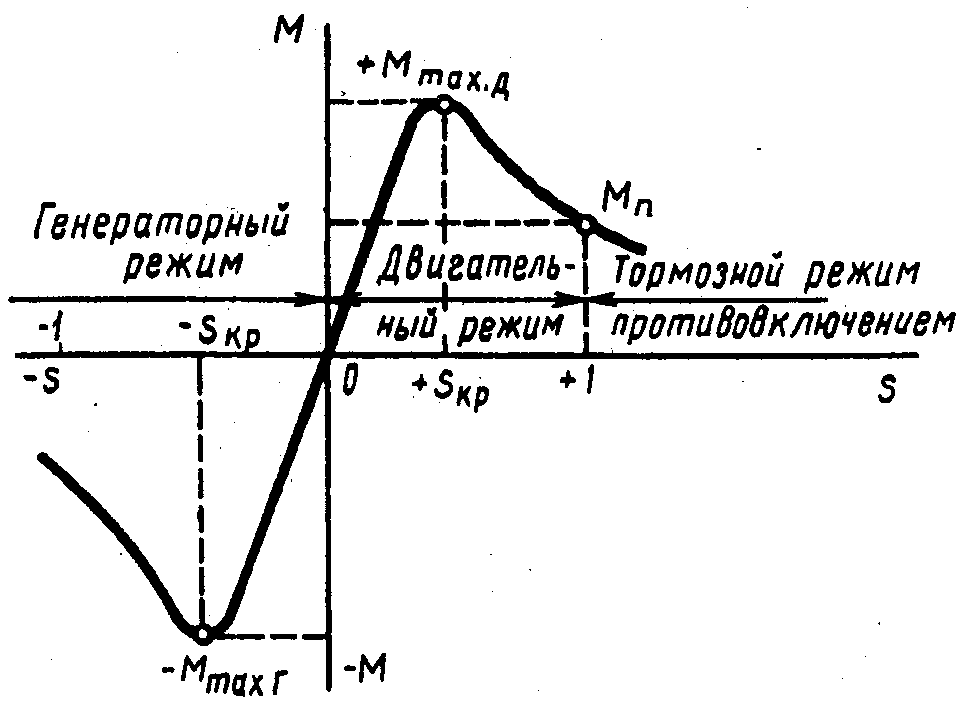
Рисунок. 5.6 - Зависимость режимов работы асинхронной машины от скольжения
На
рис5.6. показана механическая асинхронной
машины
 при
.
На этой характеристике указаны зоны,
соответствующие различным режимам
работы: двигательный режим
при
.
На этой характеристике указаны зоны,
соответствующие различным режимам
работы: двигательный режим
 ,
когда электромагнитный момент
,
когда электромагнитный момент
 является вращающим; генераторный режим
является вращающим; генераторный режим
 и тормозной режим противовключением
и тормозной режим противовключением
 ,
когда электромагнитный момент М является
тормозящим.
,
когда электромагнитный момент М является
тормозящим.
Для двигательного режима работы механическая характеристика представлена на рис.5.7. На этой характеристике можно выделить четыре основных точки:
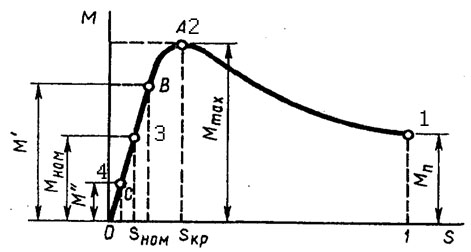
Рисунок 5.7 - Зависимость электромагнитного момента асинхронного двигателя от скольжения
1.Точка пуска с параметрами М=Мпуск;S=1;n2=0
2.Точка критическая с параметрами М=Мкр ;S=Sкр; Мкр/Мном=λ – коэффициент перегрузочной способности; Sкр – критическое скольжение можно определить:

3.Точка
номинального режима


4.
Точка холостого хода
 .
.
.
5.2 Описание схемы.
Асинхронный двигатель М получает питание от источника переменного3-х фазного тока “G1” через трансформаторную группу “А2”и автомат “А6”. В цепь ротора АД введено пускорегулировочное сопротивление- блок “А9”. В качестве нагрузочного узла применяется генератор постоянного тока независимого возбуждения. Обмотка возбуждения получает питание от регулируемого источники питания “G2”. В качестве нагрузочного сопротивления в цепи якоря генератора применяется блок “A10”. Для контроля тока и напряжения в цепи якоря применяется амперметр А2 и вольтметр V2; для контроля тока в цепи статора применяется амперметр “A1”, для контроля мощности – измеритель мощности “P2”. Для контроля скорости применяется прибор “n”- Р5 и датчик скорости “B”.
Испытуемый двигатель, генератор и тахогенератор находятся на одном валу.
Данные по аппаратуре приведены в таблице 5.1.
Перечень аппараты.
Таблица 5.1
Обозначение |
Наименование |
Тип |
Параметры |
||
G1 |
Трехфазный источник питания |
201.2 |
~ 400 В / 16 А |
||
G2 |
Источник питания двигателя постоянного тока |
206.1 |
0…250 В / 3 А (якорь) / 200 В / 1 А (возбуждение) |
||
G4 |
Нагрузочный генератор |
101.2 |
90 Вт / 220 В / 0,56 А (якорь) / 2×110 В / 0,25 А (возбуждение) |
||
G5 |
Преобразователь угловых перемещений - датчик частоты вращения |
104 |
6 вых. каналов / 2500 импульсов за оборот |
||
М1 |
Асинхронный Двигатель |
102.1 |
100 Вт / ~ 230 В / 1500 мин |
||
А2 |
Трёхфазная трансформаторная группа |
347.1
|
380 ВА; 230 В/242,235, 230, 226, 220, 133, 127 В |
|
|
А6 |
Трехполюсный выключатель |
301.1 |
~ 400 В / 10 А |
||
А9 |
Реостат для цепи ротора машины переменного тока |
307.1 |
3 0…40 Ом / 1 А |
||
А10 |
Активная нагрузка |
306.1 |
220 В / 30…50 Вт; |
||
Р1 |
Нагрузочные сопротивления - Блок мультиметров |
508.2 |
3 мультиметра 0...1000 В / 0...10 А / 0…20 МОм |
||
Р2 |
Измеритель мощностей |
507.2 |
15; 60; 150; 300; 600 В / 0,05; 0,1; 0,2; 0,5 А. |
||
Р3 |
Указатель частоты вращения |
506.2 |
-2000…0…2000 мин1 |
||
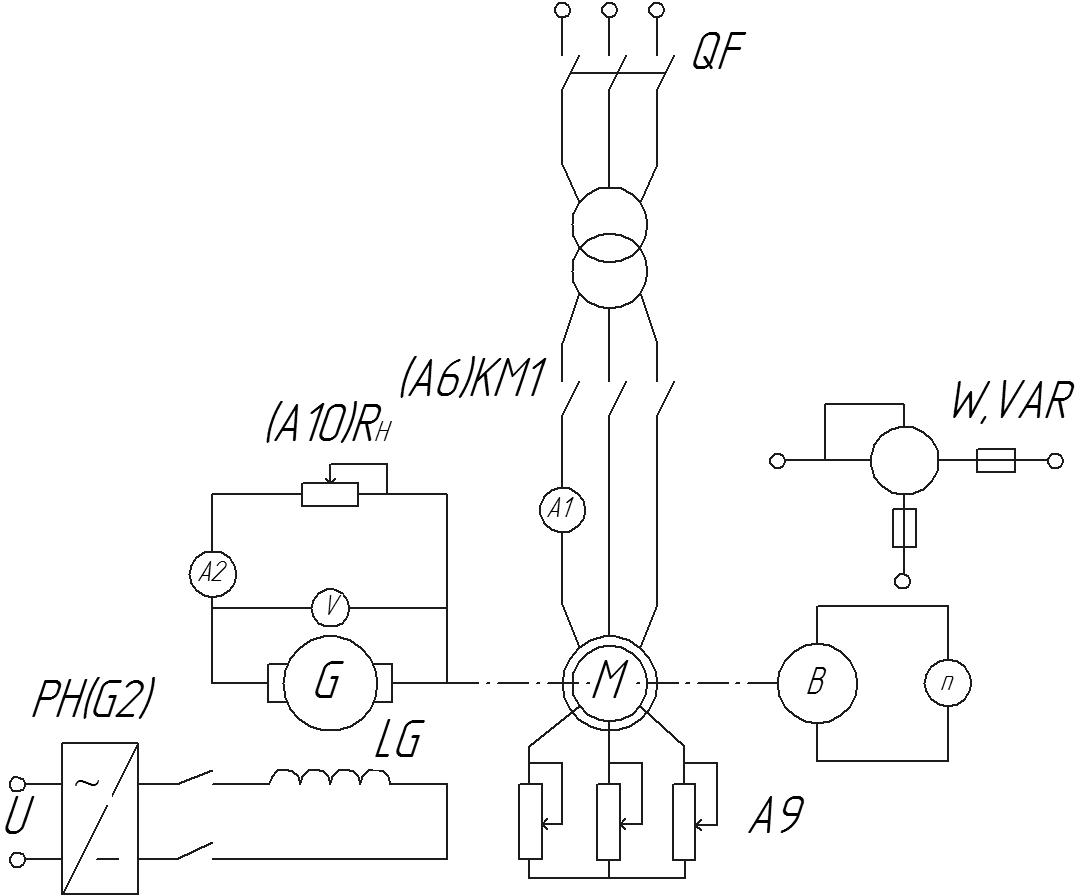
Рисунок 5.11 – Принципиальная схема опытной установки