

изучение прецессии гироскопа
.pdfvk.com/club152685050 | vk.com/id446425943
Министерство образования РФ
СанктПетербургский государственный горный институт им. Г.В. Плеханова (технический университет)
Кафедра общей и технической физики.
МЕХАНИКА
ЛАБОРАТОРНАЯ РАБОТА № 9
ИЗУЧЕНИЕ ПРЕЦЕССИИ ГИРОСКОПА
САНКТ-ПЕТЕРБУРГ
2003 г.
vk.com/club152685050 | vk.com/id446425943
Механика |
Лабораторная работа № 9 |
Ц е л ь р а б о т ы |
– экспериментально исследовать основные свойства гироскопа, |
изучить законы вращательного движения твёрдого тела.
Общие сведения
Гироскопом называют массивное симметричное тело, вращающееся с большой скоростью вокруг оси симметрии. Основное свойство гироскопа - способность сохранять неизменным направление оси вращения при отсутствии действующего на него момента внешних сил. Это свойство гироскопа основано на законе сохранения момента импульса. Гироскопы широко применяются в технике: в качестве стабилизаторов направления при движении судов, самолетов (устройство автопилот) и т.д.
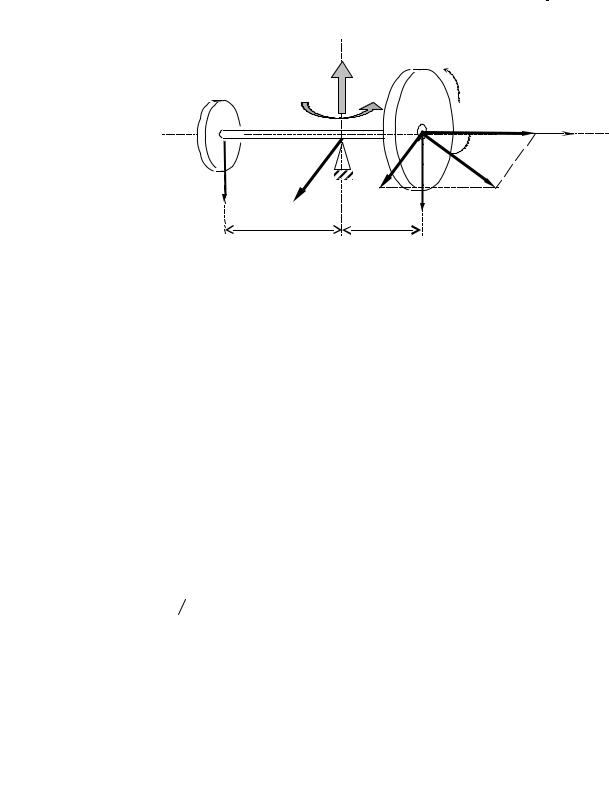
Рассмотрим гироскоп, основным элементом которого является диск D, вращающийся со скоростью вокруг горизонтальной оси ОО' (см. рисунок). Ось гироскопа шарнирно закреплена в точке C. Прибор снабжен противовесом К. Если противовес
|
|
B |
D |
|
|
|
|
|
|
|
|
|
|
K |
|
|
|
|
|
|
О |
|
|
|
O |
||
|
|
|
L |
|
||
|
|
С |
|
d |
|
|
|
|
|
|
|
|
|
M1 |
|
|
|
|
|
|
F0 |
|
|
|
|
||
|
l0 |
dLl |
F |
L1 |
|
|
B
установлен так, что точка C является центром масс системы (m - масса гироскопа; m0 - масса противовеса К; масса стержня пренебрежимо мала), то без учёта трения запишем:
m0 gl0 mgl или F0l0 Fl,
то есть результирующий момент сил, действующий на систему, равен нулю. Тогда справедлив закон сохранения момента импульса L :
dL |
0 . |
(1) |
dt |
|
где J - момент инерции гироскопа, |
Иными словами, в этом случае L J const; |
||
|
|
|
- собственная угловая скорость вращения гироскопа.
Поскольку момент инерции диска относительно его оси симметрии есть величина постоянная, то вектор угловой скорости также остается постоянным как по величине, так и по направлению. Вектор направлен по оси вращения в соответствии с правилом правого винта. Таким образом, ось свободного гироскопа сохраняет своё положение в пространстве неизменным.
Если к противовесу К добавить еще один с массой m1, то центр масс системы сместится и возникнет вращающий момент M 1 относительно точки C. Согласно уравнению
моментов, dL dt M . Под действием этого |
вращающего момента вектор |
момента |
импульса получит приращение dL , совпадающее по направлению с вектором M1 : |
|
|
dL M1dt, M1 |
m1gl0 F1l0. |
(2) |
2

vk.com/club152685050 | vk.com/id446425943
Механика Лабораторная работа № 9
Векторы сил тяжести F1 и F0 направлены вертикально вниз. Следовательно, векторы M1 , а по (2), и dL , лежат в горизонтальной плоскости. Спустя время dt момент импульса гироскопа изменится на величину dL и станет равен
L1 L dL .
Таким образом, вектор L изменяет своё направление в пространстве, всё время оставаясь в горизонтальной плоскости. Учитывая, что вектор момента импульса гироскопа направлен вдоль оси вращения, поворот вектора L на некоторый угол d за время dt означает поворот оси вращения на тот же угол. В результате ось симметрии гироскопа начнет вращаться вокруг неподвижной вертикальной оси ВВ' с угловой скоростью:
|
d |
. |
(3) |
|
|||
|
dt |
|
|
Такое движение называется регулярной прецессией, а величина |
- угловой |
||
скоростью прецессии. |
|
||
Выясним зависимость угловой скорости прецессии гироскопа от основных параметров системы. Спроецируем равенство (2) на горизонтальную ось, перпендикулярную
ОО'
dL F1l0dt .
Из геометрических соображений (см. рисунок) при малых углах поворота тогда Ld F1l0 dt , и угловая скорость прецессии выражается:
Fl / (J ) .
1 0
Порядок выполнения работы
dL Ld , а
(4)
Описание установки.
Подвижный элемент гироскопа представляет собой массивный маховик (диск), закреплённый на оси электродвигателя. Вдоль оси маховика закреплена планка с линейной метрической шкалой. Вдоль планки может перемещаться противовес.
Угол поворота оси двигателя в горизонтальной плоскости и время движения измеряются электронной схемой с фотоэлектрическим датчиком. Кроме того, угол поворота гироскопа можно считывать по нанесенной на основании подвижной части угловой шкале.
По окружности основания через каждые 5 нанесены отверстия, которые служат для считывания угла поворота при помощи фотоэлектрического датчика. На лицевой панели блока управления расположены индикаторные табло угла и времени поворота, а также кнопки «Сеть», «Сброс», «Стоп», и рукоятка регулятора скорости вращения «Рег. скорости».
Последовательность проведения измерений:
1) перемещая противовес К вдоль планки, уравновесить систему (ось должна принять горизонтальное положение); измерить и записать расстояние l0 от центра масс противовеса
до оси вращения (см. рис.); оценить ошибку измерения l0;
2)включив двигатель довести угловую скорость вращения до 1000 мин-1;
3)подвесить к противовесу перегруз m1 и дать гироскопу свободно прецессировать;
4)после поворота гироскопа на некоторый угол в пределах 30 < < 100 записать угол и время t поворота;
Если в начальный момент ось ОО' гироскопа установлена не горизонтально, то при прецессии она будет
описывать в пространстве конус относительно вертикальной оси. Наличие сил трения приводит к тому, что угол наклона оси гироскопа будет постоянно изменяться. Такое движение носит название нутации.
3
vk.com/club152685050 | vk.com/id446425943
Механика Лабораторная работа № 9
Повторить пп. 2-4 при данной угловой скорости ротора не менее трёх раз. Провести измерения для пяти-шести режимов вращения ротора, меняя угловую скорость через 1000 мин-1 от 1000 мин-1 до 6000 мин-1. Записать значения массы m1 с погрешностью.
Результаты измерений оформить в виде таблицы:
Таблица 1
Физ. величина |
|
|
|
|
t |
t |
|
|
J |
J |
||||
Ед. измерения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Номер опыта |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
1 |
|
1 |
|
|
|
|
|
|
|
1. |
1 |
|
2 |
|
2 |
|
2 |
|
|
|
|
|
|
|
|
|
3 |
|
3 |
|
3 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
J |
|
|
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
… |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
При обработке результатов эксперимента:
1)вычислить угловую скорость прецессии гироскопа для всех значений угловой
скорости согласно определению: = / t (вращение в данном случае - равномерное) и вычислить среднее значение для каждого режима вращения двигателя;
2)найти ошибку измерений по разбросу результатов;
3)построить график зависимости (1/ ); сделать вывод относительно выполнения зависимости (4);
4)рассчитать момент инерции гироскопа в каждом случае (k – номер измерения, и
выразить в радиан/c):
Jk m1 gl0 / k k .
5)вычислить среднее значение J ;
6)определить среднюю арифметическую ошибку результата J (формулу вывести самостоятельно).
Результат измерений представить в виде: J J J .
Контрольные вопросы
1.Что такое гироскоп?
2.Какими свойствами обладает гироскоп? Какими физическими законами обусловлены эти свойства?
3.Почему возникает регулярная прецессия гироскопа?
4.От каких параметров системы зависит угловая скорость прецессии?
4