

Методические указания по выполнению лабораторных работ на экспериментальной установке Роторно-опорные узлы / Методические указания_РОУ1-РОУ2
.pdfходить схватывание поверхностей и последующий задир материалов. Работоспособность активного магнитного подшипника в аварийных
ситуациях наиболее предпочтительна: во-первых, из-за активной системы управления, во-вторых, из-за наличия страховочного подшипника качения.
Конструктивные особенности. По геометрическим параметрам наибольшие габариты имеют активные магнитные подшипники, подшипники качения имеют минимальные осевые размеры, но повышенные диаметральные, для подшипников скольжения наоборот – меньшие диаметры, но большие осевые габариты.
Подшипники качения являются неразъемными по своей конструкции, что по сравнению с подшипниками скольжения, которые могут быть выполненными разъемными и имеют большие зазоры, предъявляет повышенные требования по точности и трудоемкости монтажа. Монтаж активных магнитных подшипников облегчается повышенными зазорами по сравнению с подшипниками скольжения.
Технологические особенности и стоимость. Подшипники качения, являясь стандартизованным продуктом крупносерийного производства, обладают несомненным преимуществом перед другими видами опор по технологии изготовления и стоимости.
Шарикоподшипниковые стали, используемые для производства подшипников качения более дешевы, чем антифрикционные цветные металлы втулок подшипников скольжения.
Для подшипников скольжения в большинстве случаев используются цветные металлы, имеющую большую стоимость, а также предъявляются повышенные требования по твердости к цапфам валов, что обуславливает дополнительные затраты на термохимическую обработку. Исключение составляют уникальные подшипники качения с композитными материалами, которые имеют повышенную стоимость.
Но наибольшую сложность изготовления и высокую стоимость имеют активные магнитные подшипники из-за большого количества деталей, сложной системы управления и применения специализированных материалов по характеристикам электромагнитной проводимости.
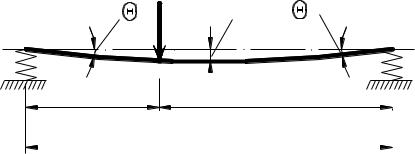
Для того чтобы учесть жесткость опорного узла при теоретическом расчете введем расчетную схему ротора вместо абсолютно жестких опор податливые, т.е. обладающих конечной жесткостью (рисунок 2.1).
21
A F f
A
B
B
|
a |
|
|
|
|
b |
|
|
|
|
||||
l |
|
|
|
|||||||||||
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рисунок 2.1 – Схема изгиба вала на податливых опорах |
|
|||||||||||||
Соответственно формулы для определения жесткости изменятся сле- |
||||||||||||||
дующим образом: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
– для симметричной схемы (а=b= l /2) Сизг = |
|
|
48EI х K |
|
||||||||||
|
|
|
; |
|
(2.4) |
|||||||||
|
||||||||||||||
|
|
|
|
|
|
|
|
l 3 K + 48EI х |
|
|||||
– при несимметричном нагружении Сизг |
= |
|
|
|
12EI хlK |
|
||||||||
|
|
|
; |
(2.5) |
||||||||||
|
|
|
||||||||||||
|
|
|
|
|
a |
2b 2 K +12EI хl |
|
|||||||
– для консольной схемы Сизг = |
12EI |
х K |
|
, |
|
|
|
|
|
(2.6) |
||||
l 3 K +12EI х |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
||||
здесь K – коэффициент жесткости подшипника скольжения, Н/м.
Расчетная жесткость гидродинамического подшипника экспериментальной установки, работающего на масле, составляет порядка K=2.3·107 Н/м.
2.6 Устройство и принцип работы установки
Изучается по приложению А.
2.7 Описание программного обеспечения
Изучается по приложению Б.
2.8Последовательность выполнения работы
1.Рассчитать критические частоты роторов по формуле 1.9, при этом значения изгибных жесткостей при различных схемах расположения нагрузочного диска рассчитываются по формулам 2.4 – 2.6 с учетом податливости опорного узла. При задании жесткости опорного узла берется коэффициент KY. Обратить внимание, что длина межопорного расстояния для подшипника
22
скольжения изменяется по сравнению с установкой вала на подшипники качения (см. Приложение А).
2. Провести серию экспериментов по определению амплитудночастотных характеристик роторной системы для различных значений межопорного расстояния, положения и массы нагрузочного диска (аналогично пп.3 – 5 подраздела 1.8 лабораторной работы №1). Результаты занести в таблицу 2.1. Построить амплитудно-частотную характеристику ротора и определить значения критической частоты (см. Приложение Б). Результаты занести в таблицу 2.1.
Таблица 2.1 – Результаты экспериментальных исследований критических |
|||||
|
частот для вала длинной 645 мм на подшипниках скольжения |
||||
|
Масса и положение дисков |
Расстояние от левой опоры |
|
||
№ |
ротора |
|
до дисков |
|
|
|
|
а=b=257.5 |
а=284.5 мм, |
а=333.5 мм, |
консоль |
|
|
мм |
b=230.5 мм |
b=181.5 мм |
|
Жесткость вала, Н/м / |
Расчетные значения критических частот, об/мин |
|
|||
1 |
m1 |
Сизг |
… |
… |
… |
|
(mв+mд1) |
nкр |
|
|
|
2 |
m2 |
… |
… |
… |
… |
|
(mв+mд1 +mд2) |
|
|
|
|
3 |
m3 |
… |
… |
… |
Сизг |
|
(mв+mд1 +2mд2) |
|
|
nкр |
|
Экспериментальные значения критических частот, об/мин |
|
|
|||
4 |
m1 |
nкр |
… |
… |
… |
|
(mв+mд1) |
|
|
|
|
5 |
m2 |
… |
… |
… |
… |
|
(mв+mд1 +mд2) |
|
|
|
|
6 |
m3 |
… |
… |
… |
nкр |
|
(mв+mд1 +2mд2) |
|
|
|
|
3.Провести сравнительный анализ теоретических и экспериментальных данных по подшипнику скольжения.
4.Провести сравнительный анализ амплитудно-частотных характеристик для подшипников качения (результаты ЛР№РОУ – 1) и подшипникам скольжения:
–сравнить значения критических скоростей и сделать вывод о влиянии жесткости опорного узла на них;
–сравнить амплитуды колебаний ротора в резонансном режиме и сделать вывод о влиянии демпфирования смазочного слоя подшипника скольжения;
23
5. Сделать вывод о влиянии жесткостных и демпфирующих характеристик опорного узла на критические частоты и амплитуды колебаний.
2.9Контрольные вопросы
1.Назовите ключевые отличия подшипников скольжения и качения по трению, предельной быстроходности, несущей способности и факторам, ограничивающих их долговечность
2.Объяснить разницу подшипников скольжения с подшипниками качения по динамическим характеристикам: жесткости и демпфированию.
3.Объясните, чем обусловлена разница значений критических частот роторов при установке на подшипники качения и подшипники скольжения?
4.Чем объясняется уменьшение амплитуд колебаний ротора на резонансном режиме при установке ротора на подшипники скольжения по сравнению с такой же конструкцией, но с подшипниками качения?
24
Лабораторная работа №РОУ – 3 ИЗУЧЕНИЕ УПРУГИХ ДЕФОРМАЦИЙ ВРАЩАЮЩИХСЯ ВАЛОВ
3.1 Цель работы:
Изучение упругих деформаций вращающихся валов и факторов, их определяющих.
3.2Задачи исследований
1.Анализ жесткости роторно-опорной системы.
2.Теоретическое определение прогибов, углов поворота и коэффициентов изгибной жесткости валов.
3.Экспериментальное определение деформаций валов при различных значениях нагрузки и геометрических параметров.
4.Графическая интерпретация результатов, их анализ и выводы по работе.
3.3 Ключевые слова и понятия
Ротор, подшипник качения, жесткость, податливость, деформация, угол поворота.
3.4 Объект исследования и оборудование
Экспериментальная установка «Роторно-опорные узлы» в сборе с подшипниками качения (в ходе работы используются 2 варианта сборки: 1) по длине межопорного расстояния l=490 мм и трех положениях нагрузочного диска; 2) консольное расположение нагрузочного диска). Информационноизмерительная система: персональный компьютер (Windows 2000/NT/XP, Microsoft Office, LabVIEW, APM WinMachine, InternetExplorer), 4 вертикаль-
ных датчика по длине межопорного расстояния (при монтаже с консольным валом 3 датчика ставятся по длине межопорного расстояния, а 1 справа от правого опорного узла), 1 датчик перемещений слева от левого опорного узла (таходатчик).
3.5 Теоретическая часть
Одним из важнейших условий работоспособности валов является жесткость, т.е. способность вала как упругого тела сохранять свою форму под действием внешних нагрузок. Упругие деформации валов влияют на работу механических передач, рабочих колес насосов, компрессоров, турбин, а также подшипников. Например, прогиб вала под зубчатым колесом приводит к неравномерному распределению нагрузки по площади зацепления; при
25
больших углах поворота в опорах может произойти защемление вала с последующим разрушением подшипника; в технологическом оборудовании деформации валов снижают точность обработки и качество поверхности деталей; в делительных механизмах и приборах упругие перемещения снижают точность измерений и т.п. Поэтому иногда размеры вала определяют не из условия обеспечения прочности, а из расчета на жесткость.
Расчет на жесткость сводится к определению прогибов f, углов поворота Θ и углов закручивания ϕ . В общем случае параметры жесткости находятся путем решения дифференциального уравнения упругой линии ротора с учетом геометрии, свойств материала и действующих нагрузок:
d 2 f |
= |
M (z) |
, |
|
dz2 |
E J(z) |
|||
|
|
где M (z) |
– изгибный момент; E J(z) |
– изгибная жесткость вала. |
|
|
|
||||||||||
При |
|
постоянной жесткости |
и неподвижном |
закреплении |
в опорах |
||||||||||
( f(0) = f(l) |
= 0) |
в результате интегрирования могут быть определены прогиб и |
|||||||||||||
углы поворота вдоль оси вала: |
|
|
|
|
|
|
|
||||||||
|
|
1 |
|
|
M(z) |
z2 |
F z3 |
|
|
1 |
|
F z2 |
|||
f(z) = |
|
|
( |
|
|
− |
|
+Cz + D); Θ(z) = |
|
(M(z) z − |
|
|
+C), |
||
|
|
2 |
|
12 |
E Jz |
4 |
|
||||||||
|
|
E Jz |
|
|
|
|
|
|
|
||||||
где F – сила, действующая в плоскости деформации; C, D – коэффициенты, зависящие от параметров жесткости и действующих нагрузок.
Для ступенчатого вала переменного поперечного сечения решение задачи по определению параметров, а также спектра частот и форм собственных колебаний может быть получено с использованием методов дискретных моделей, начальных параметров, интегральных, а также вариационных методов Ритца, Рэлея и т.д. Широкое распространение в автоматизированных системах проектирования получил метод начальных параметров, в котором ротор представляется участками постоянного сечения. Для каждого участка составляются зависимости между величинами перемещений, углов поворота, изгибающими моментами и перерезывающими силами. При этом параметры начала сечения считаются известными, а параметры на конце участка определяются. Связь между параметрами строится при помощи уравнения упругой линии ротора.
Несмотря на то, что для большинства роторов крутильная жесткость не играет существенной роли, в отдельных случаях есть необходимость проведения проверочных расчетов по этому критерию. В первую очередь это относится к длинным валопроводам с участками пониженной жесткости (ослаб-
26
ленными шпоночными пазами, резьбой, шлицами, отверстиями и т.п.). Угол закручивания цилиндрического участка вала длиной l под действием крутящего момента Т будет определяться по формуле:
ϕ = |
T l |
|
= λ T , |
|
G J |
0 |
|||
|
|
где G – модуль сдвига; J0 – полярный момент инерции сечения вала; λ – податливость вала.
Для ослабленных участков вводят коэффициенты понижения жесткости в зависимости от влияния фактора. Углы закручивания и податливость ступенчатых валов определяют путем их сложения на отдельных участках, при этом дополнительно прибавляют значения на переходных участках.
Для простых моделей вала постоянной жесткости и с сосредоточенными нагрузками (рисунок 1.1б) значения прогибов и углов поворота в упорных сечениях от действия каждой силы могут быть рассчитаны с использованием
следующих зависимостей: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Для силы F1 |
|
F1a b(l +b) |
|
|
|
|
|
|
|
|
|
|
|
|
F1a b(l +b) |
|
|
|
|
|
|
||||||||||||
|
ΘA = |
|
; |
|
|
ΘB = −ΘC |
= − |
; |
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
6EJ l |
|
|
|
|
|
|
|
|
|
|
|
6EJ l |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
F a b(b − a) |
|
|
|
F a2 |
b2 |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
ΘD = |
|
|
1 |
|
|
|
|
|
|
; |
yD = |
|
1 |
|
|
|
|
; |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
3EJ l |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
3EJ l |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Для силы F2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c(3a2 −l 2 ) |
|
|
|
||||||||
|
|
|
F c l |
|
|
|
|
|
|
F c l |
|
|
|
|
F |
|
|
|
|||||||||||||||
|
ΘA = − |
|
2 |
|
|
|
; |
ΘB = |
|
2 |
|
|
; ΘD = |
|
|
2 |
|
|
|
|
|
|
|
; |
|
|
|||||||
|
|
6EJ |
|
|
|
3EJ |
|
|
|
6EJ l |
|
|
|
|
|
||||||||||||||||||
|
F c(2l |
+3c) |
|
|
|
|
|
|
|
F c a(l 2 −a2 ) |
|
|
|
F |
c |
2 (l + c) |
|
||||||||||||||||
ΘC = |
2 |
|
|
|
|
; |
|
|
yD = |
|
|
2 |
|
|
|
|
|
|
|
; |
yC = |
|
2 |
|
|
|
|
|
. |
||||
|
|
|
|
|
|
|
|
|
6EJ l |
|
|
|
|
|
|
3EJ |
|||||||||||||||||
6EJ |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
При действии на вал одновременно нескольких сосредоточенных сил углы и величины прогибов в каждом сечении могут находиться в первом приближении методом суперпозиций. В этом случае проводится расчет значений Θи y в характерных точках ротора по приведенным выше формулам с учетом действия каждой силы, а затем осуществляется суммирование деформаций в отдельных сечениях.
3.6 Устройство и принцип работы установки
Аналогично лабораторной работе №1. Изучается по приложению А.
27
3.7 Описание программного обеспечения
Изучается по приложению Б.
3.8Последовательность выполнения работы
1.Рассчитать углы поворота и перемещения вала в местах расположения опор и под нагрузочным диском для различных значений межопорного расстояния и положениях нагрузочного диска. Результаты занести в таблицу 3.1.
Таблица 3.1 – Результаты теоретического расчета перемещений и углов поворота упругой линии вала
Схема вала |
I. Межопорное расстояние l=490 мм, |
|
||
|
положение диска а=b=245 мм |
|
||
|
|
|
|
|
Сечение вала |
Опора А |
Нагрузочный |
|
Опора Б |
Деформация |
|
диск |
|
|
|
|
|
|
|
Угол поворота θ |
|
|
|
|
Прогиб f |
|
|
|
|
Схема вала |
II. Межопорное |
расстояние l=490 мм |
, |
|
|
положение диска а=272 мм, b=218 мм |
|
||
|
|
|
|
|
Сечение вала |
Опора А |
Нагрузочный |
|
Опора Б |
Деформация |
|
диск |
|
|
|
|
|
|
|
Угол поворота θ |
|
|
|
|
Прогиб f |
|
|
|
|
Схема вала |
III. Межопорное |
расстояние l=490 мм |
, |
|
|
положение диска а=321 мм, b=169 мм |
|
||
|
|
|
|
|
Сечение вала |
Опора А |
Нагрузочный |
|
Опора Б |
Деформация |
|
диск |
|
|
|
|
|
|
|
Угол поворота θ |
|
|
|
|
Прогиб f |
|
|
|
|
Схема вала |
IV. Межопорное |
расстояние l=390 мм |
, |
|
|
положение диска консоль с=120 мм |
|
||
|
|
|
|
|
Сечение вала |
Опора А |
Нагрузочный |
|
Опора Б |
Деформация |
|
диск |
|
|
|
|
|
|
|
Угол поворота θ |
|
|
|
|
Прогиб f |
|
|
|
|
2. Провести серию экспериментов по определению прогибов вала на частоте основного рабочего режима 2000 об/мин. На основании показаний датчи-
28
ков перемещений построить действительную упругую линию вала и графическим способом определить перемещения и углы поворота в исследуемых сечениях (см. Приложение Б). Результаты занести в таблицу 3.2.
Таблица 3.2 – Экспериментальные значения перемещений и углов поворота упругой линии вала
Схема вала |
I. Межопорное расстояние l=490 мм, |
|
||
|
положение диска а=b=245 мм |
|
||
|
|
|
|
|
Сечение вала |
Опора А |
Нагрузочный |
|
Опора Б |
Деформация |
|
диск |
|
|
|
|
|
|
|
Угол поворота θ |
|
|
|
|
Прогиб f |
|
|
|
|
Схема вала |
II. Межопорное |
расстояние l=490 мм |
, |
|
|
положение диска а=272 мм, b=218 мм |
|
||
|
|
|
|
|
Сечение вала |
Опора А |
Нагрузочный |
|
Опора Б |
Деформация |
|
диск |
|
|
|
|
|
|
|
Угол поворота θ |
|
|
|
|
Прогиб f |
|
|
|
|
Схема вала |
III. Межопорное |
расстояние l=490 мм |
, |
|
|
положение диска а=321 мм, b=169 мм |
|
||
|
|
|
|
|
Сечение вала |
Опора А |
Нагрузочный |
|
Опора Б |
Деформация |
|
диск |
|
|
|
|
|
|
|
Угол поворота θ |
|
|
|
|
Прогиб f |
|
|
|
|
Схема вала |
IV. Межопорное |
расстояние l=390 мм |
, |
|
|
положение диска консоль с=120 мм |
|
||
|
|
|
|
|
Сечение вала |
Опора А |
Нагрузочный |
|
Опора Б |
Деформация |
|
диск |
|
|
|
|
|
|
|
Угол поворота θ |
|
|
|
|
Прогиб f |
|
|
|
|
3.На графике упругой линии вала на бланке отчета об эксперименте нанести результаты теоретических расчетов деформаций вала и провести сравнительный анализ результатов углов поворота и прогибов в местах расположения опорных узлов и нагрузочного диска характерных.
4.Сравнить действительные углы поворота и прогибы с допускаемыми и сделать вывод о работоспособности опорного узла по критерию жесткости.
29
3.9Контрольные вопросы
1.Что такое жесткость и чем важен этот критерий для роторных систем?
2.В чем состоит принципиальное различие методик расчета вала по критерию жесткости и виброустойчивости?
3.Как влияют на жесткость вала шпоночные пазы, нарезанная резьба, шлицы, отверстия и т.п.?
4.В чем заключается сущность метода суперпозиций для расчета валов, на которые действуют сразу несколько сосредоточенных сил?
5.Будет ли вал, правильно рассчитанный по критерию прочности, нормально работать, если он не удовлетворяет условию жесткости (например, угол поворота в месте установки подшипников больше, чем допустимый)?
30