

10.Теорема о моментах инерции относительно паралельных осей. Моменты инерции простейших тел.
Теорема
Штейнера. 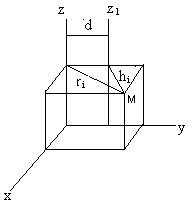 Iz=Σmi*ri2=ΣMi(xi2+yi2);
Iz=Σmihi2=Σmi[xi2+(yi-d)2]=
=Σmi(xi2+yi2)+d2Σmi=I0+M*d2
Момент инерции
механической системы относительно
данной оси равен моменту инерции
относительно оси, ей параллельной,
проходящей через центр масс системы,
сложенному с произведением массы всей
системы на квадрат расстояния между
осями. J=J0+M*d2
Iz=Σmi*ri2=ΣMi(xi2+yi2);
Iz=Σmihi2=Σmi[xi2+(yi-d)2]=
=Σmi(xi2+yi2)+d2Σmi=I0+M*d2
Момент инерции
механической системы относительно
данной оси равен моменту инерции
относительно оси, ей параллельной,
проходящей через центр масс системы,
сложенному с произведением массы всей
системы на квадрат расстояния между
осями. J=J0+M*d2
М.
и. однородного тонкого стержня

М.
и. однородной круг. пластинки малой
толщины

М.
и. однородного круг. цилиндра
М.
и. полого цилиндра
М .
и. однородного кругового конуса
.
и. однородного кругового конуса
М.
и. однородного шара

11.Теорема о движении центра масс мех. Сист. Законы сохранения центра масс.
Центр масс механической системы движется как материальная точка с массой равной массе всей системы под действием главного вектора внешних сил.
1) если Re=0,то ас=dVc/dt=0. Vc=const, следовательно движение прямолинейное и равномерное. Если главный вектор внешних сил действующий на систему равен 0,то центр масс этой системы, либо покоится, либо совершает равномерное прямолинейное движение. Rxe=0,то асx=dVcx/dt=0. Vcx=const,следовательно движение равномерное. В случае если Vcx=0,то Vcx=dxc/dt=0 или xc=const.
12.Кол-во движения т. и системы. Теорема об изменении кол-ва движения мат. т. и мех. системы. Законы сохранения кол-во движения.
1 )
Количество
движения есть векторная величина,
которая является мерой механического
движения точки или системы.
Для
точки вектор количества движения
определяется как произведение её массы
на вектор скорости
)
Количество
движения есть векторная величина,
которая является мерой механического
движения точки или системы.
Для
точки вектор количества движения
определяется как произведение её массы
на вектор скорости
 Вектор
Вектор
 направлен
по касательной к траектории, так же как
и вектор
направлен
по касательной к траектории, так же как
и вектор
 Для механической системы
Для механической системы


Количество движения механической системы есть мера поступательного характера механического движения.
2) Теорема об изменении количества движения точки (дифференциальная форма)


 где
где
 равнодействующая всех сил, действующих
на точку.
В случае
движения мех. системы при рассмотрении
всех сил, действующих на эту систему
учитываются только внешние силы, т.к.
главный вектор внутренних сил системы
всегда =0. Поэтому для мех. системы
указанная теорема примет вид:
равнодействующая всех сил, действующих
на точку.
В случае
движения мех. системы при рассмотрении
всех сил, действующих на эту систему
учитываются только внешние силы, т.к.
главный вектор внутренних сил системы
всегда =0. Поэтому для мех. системы
указанная теорема примет вид: Производная по
времени от вектора количества движения
мех.системы равна главному вектору
внешних сил, действующих на систему.
Производная по
времени от вектора количества движения
мех.системы равна главному вектору
внешних сил, действующих на систему.
3)Следствия теоремы: (закон сохранения количества движения)
Если
 2) Если
2) Если
 3)
Теорема об изменении количества движения
мех.системы (интегральная форма) (теорема
импульсов) Рассмотрим движение
мех.системы под действием совокупности
внешних сил. Справедливо будет:
3)
Теорема об изменении количества движения
мех.системы (интегральная форма) (теорема
импульсов) Рассмотрим движение
мех.системы под действием совокупности
внешних сил. Справедливо будет:


 Изменение количества движения мех.системы
за некоторый промежуток времени равно
суммарному импульсу всех внешних сил,
действующих на систему за тот же
промежуток времени.
Изменение количества движения мех.системы
за некоторый промежуток времени равно
суммарному импульсу всех внешних сил,
действующих на систему за тот же
промежуток времени.