

Имя опции Наименование Размерность Значение по умолчанию
DIGERRDEFAULT Максимальное количество контролируемых ошибок цифровых устройств — 20
DIGERRLIMIT Максимальное количество сообщений об ошибках в цифровых устройствах — 0**
DIGFREQ Частота дискретизации при анализе цифровых устройств Гц 1010
DIGINITSTATE Установка начального состояния триггеров: 0 — сброс; 1 — установка; 2 — X — 2
DIGIOLVL Уровень интерфейса А/Ц, Ц/А по умолчанию — 1
DIGMNTYMX*** Селектор выбора задержки цифрового устройства по умолчанию: 1 — минимум; 2 — типичное значение; 3 — максимум; 4 — мин/макс 2
DIGMNTYSCALE Масштабный коэффициент для расчета минимальной задержки — 0,4
DIGTYMXSCALE Масштабный коэффициент для расчета максимальной задержки — 1,6
DIGOVRDRV Отношение выходных сопротивлений цифровых устройств, при которых изменяется состояние общего выходного узла 3
DISTRIBUTION Закон распределения отклонений параметров от номинальных значений — UNIFORM
GMIN Минимальная проводимость ветви цепи (проводимость ветви, меньшая GMIN, считается равной нулю) См 10-12
ITL1 Максимальное количество итераций в режиме DC — 150
ITL2 Максимальное количество итераций при расчете передаточных функций по постоянному току при переходе к последующей точке - 20
ITL4 Максимальное количество итераций при переходе к следующему моменту времени в режиме TRAN - 10
ITL5* Общее максимальное количество всех итераций в режиме TRAN (установка ITL5 = 0 означает бесконечность) — 0**
LIMPTS* Максимальное количество точек, выводимых в таблицу или на график — 0**
NUMDGT Количество значащих цифр в таблицах выходных данных (не более 8) — 4
Имя опции Наименование Размерность Значение по умолчанию
PIVREL* Относительная величина элемента строки матрицы, необходимая для его выделения в качестве ведущего элемента (режим АС) 10-3
PIVTOL* Абсолютная величина элемента строки матрицы, необходимая для его выделения в качестве ведущего элемента (режим АС) - 10-13
RELTOL Допустимая относительная ошибка расчета напряжений и токов в режиме TRAN — 10-3
TNOM Номинальная температура °С 27
VNTOL Допустимая ошибка расчета напряжений в режиме TRAN В 10-6
WIDTH Длина строки выходного файла (аналогично директиве .WIDTH) — 80
Значения этих опций рекомендуется не изменять. ** Нулевое значение этих опций означает бесконечность. * Назначение DIGMNTYMX=4 означает моделирование цифровых устройств по методу наихудшего случая.
Директивы моделирования - расчет переходных процессов, задание начальных условий, спектральный анализ Фурье (два способа).
Transient — расчет переходных процессов. Переходные процессы рассчитываются по директиве
.TRAN[/OP] <шаг вывода данных> <конечное время> + [<начальный момент времени вывода данных> + [<максимальный шаг>]] [SKIPBP]
Переходные процессы всегда рассчитываются с момента t = 0 до момента <конечное время>. Перед началом расчета переходных процессов рассчитывается режим по постоянному току. Шаг интегрирования выбирается автоматически. Если задан параметр <начальный момент времени вывода данных>, то вывод результатов расчетов подавляется на интервале времени от t = О до указанного значения. Максимальное значение шага интегрирования устанавливается параметром <максимальный шаг>; если он не указан, то максимальный шаг интегрирования устанавливается равным <конечное время>/50. Если исследуемая схема не имеет инерционностей, то шаг интегрирования равен величине <шаг вывода данных>.
Величина <шаг вывода данных> используется для вывода данных по директивам .PRINT и .PLOT. При этом для расчета значений переменных применяется квадратичная интерполяция между дискретными отсчетами (это не относится к выводу графиков с помощью программы Probe, где применяется линейная интерполяция). С <шагом вывода данных> рассчитываются с помощью обратного преобразования Лапласа импульсные характеристики управляемых источников, заданных передаточными функциями.
Если задан параметр <начальный момент времени вывода данных>, то вывод результатов расчета подавляется на интервале времени от t = 0 до указанного значения.
Параметр <максимальный шаг> задает максимальное значение шага интегрирования. В частности, его полезно использовать при выполнении спектрального анализа как с помощью директивы .FOUR, так и в программе Probe.
Режим по постоянному току определяет начальные условия для расчета переходных процессов. Это связано с тем, что значения источников сигналов в момент t = 0 могут отличаться от их постоянных составляющих. При этом в выходной файл .out выводятся только значения узловых потенциалов в режиме по постоянному току. Указание в директиве .TRAN суффикса /ОР выводит в этот файл полную информацию о режиме по постоянному току (как по директиве .ОР).
Если в конце директивы .TRAN указать параметр SKIPBP (Skip Bias Point), то расчет режима по постоянному току отменяется. При этом начальные значения напряжений на емкостях и токов через индуктивности указываются в опциях вида IС= ..., включенных в описания конденсаторов и индуктивностей, а начальные значения узловых потенциалов указываются в директиве .IC.
Задание начальных условий. Начальные значения узловых потенциалов по постоянному току задаются по директиве
.IC V(<HOMep узла>[,<номер узла>}) = Оначение ЭДС>*
Приведем пример
.IC V(5)=1.24V(IN)=0
К'указанным узлам подключаются источники постоянного напряжения с внутренним сопротивлением 0,0002 Ом, и рассчитывается режим по постоянному току. После завершения расчета эти источники отключаются — так задаются начальные значения узловых потенциалов перед расчетом переходных процессов.
Если в задании имеются и директива .NODESET, и директива .IC, то первая не будет выполняться при расчете режима по постоянному току перед началом анализа переходных процессов.
Спектральный анализ проводится по директиве
.FOUR <частота первой гармоники f1> [количество гармоник] + <выходная переменная>*
Спектральный анализ производится с помощью быстрого преобразования Фурье (БПФ) после завершения расчета переходного процесса (в задании на моделирование должна иметься и директива .TRAN). Имена переменных, спектр которых должен быть рассчитан, указываются в списке <выходная переменная>. В директиве .FOUR задается частота первой гармоники f1 и количество гармоник. Максимальное количество гармоник п = 100. По умолчанию рассчитываются первые 9 гармоник. В программе рассчитываются амплитуды постоянной составляющей А0 и остальных п гармоник А1, A2„ ..., Aп. Спектральному анализу подвергается участок реализации переходного процесса длительностью Т = 1/f1 в конце интервала анализа (чтобы завершились переходные процессы). Результаты спектрального анализа выводятся в выходной файл *.OUT в виде таблиц без указания директив .PRINT, .PLOT или .PROBE (в программе Probe они недоступны). Кроме того, рассчитывается коэффициент нелинейных искажений (в процентах) по формуле
Для повышения точности расчета спектров рекомендуется с помощью параметра <максимальный шаг> задать максимальное значение шага интегрирования, равное требуемой величине шага дискретизации по времени.
Программа Pspice. Основные команды.
Программа Probe. Построение графиков и их обработка.
Результаты моделирования, полученные с помощью PSpice, заносятся в файлы данных для построения графиков (имеют расширения имени *.DAT или *.ТХТ) и передаются в Probe. Перечень переменных, данные которых заносятся в эти файлы, устанавливается по команде Analysis>Probe Setup программы PSpice Schematics (либо все переменные, либо переменные, отмеченные на схеме маркерами). Программа Probe не только отображает графики полученных результатов, но и может выполнять их обработку, включая сложные арифметические и алгебраические вычисления, взятие интегралов, преобразование Фурье, измерение параметров сигналов, частотных характеристик и т.п. При моделировании аналого-цифровых устройств графики переходных процессов в цифровой и аналоговой части схемы выводятся на одном экране с одинаковым масштабом по времени. На графики можно наносить произвольные надписи и графические символы.
При вводе переменных в программе Probe соблюдаются следующие правила. Символы в верхнем и нижнем регистрах не различаются, за исключением суффиксов m =10-3 и М = 106, используемых при назначении масштабов по осям координат. Остальные суффиксы в программе Probe имеют те же значения, что и в PSpice. Суффиксы используются только для обозначения масштаба осей переменных, и их нельзя применять в арифметических выражениях.
Кроме того, в программе Probe пользуются следующими суффиксами для простановки единиц размерности на осях координат:
V - вольты;
d — градусы;
А — амперы;
s — секунды;
W — ватты;
Н — герцы.
В программе Probe также определено, что W=V-A, V=W/A, A=W/V. Так что если построить график выражения V(5)*ID(M13), то ось ординат автоматически будет размечена в ваттах.
Модели аналоговых компонентов – задание параметров компонентов.
Параметры компонентов указываются двумя способами: 1) непосредственно в предложении, описывающем включение компонента в схему; 2) с помощью директивы .MODEL, имеющей структуру:
.MODEL <имя модели> [АКО:<имя модели прототипа>]
+ <имя типа модели>
+ ([<имя параметра>= <значение>
+ [<спецификация случайного разброса значения параметра>]]*
+ [Т_МЕАSURED=<значеншг>] [[Т_АВ8>=<значение>] или
+ [Т_REL_СLОВАL=<значение>] или [Т_REL_LOCAL=<значекие>]])
Здесь <имя модели> — имя модели компонента схемы, например RLOAD, KT315V, D104. После ключевого слова АКО (A Kind Of) помещается ссылка на имя модели прототипа, что позволяет указывать только значения различающихся параметров. Тип компонента определяется <именем типа модели>, как указано в табл. 4.13.
Таблица 4.13. Имена типов аналоговых и цифровых компонентов
Имя типа модели Тип компонента
Аналоговые компоненты
САР Конденсатор
CORE Магнитный сердечник трансформатора
D Диод
GASFET Арсенид-галлиевый полевой транзистор с каналом п-типа
IND Индуктивность
ISWITCH Ключ
LPNP Боковой биполярный р-л-р-транзистор
NIGBT Статически индуцированный биполярный транзистор
NJF Полевой транзистор с каналом л-типа
NMOS МОП-транзистор с каналом л-типа
NPN Биполярный л-р-я-транзистор
PJF Полевой транзистор с каналом р-типа
PMOS МОП-транзистор с каналом р-типа
PNP Биполярный р-л-р-транзистор
RES Резистор
TRN Линия передачи
VSWITCH Ключ
Устройства интерфейса
DINPUT Аналого-цифровой интерфейс
DOUTPUT Цифро-аналоговый интерфейс
UADC Аналого-цифровой преобразователь
UBTG Двунаправленный переключающий вентиль
UDAC Цифроаналоговый преобразователь
UDLY Цифровая линия задержки
UEFF Триггер с динамическим управлением
UGATE Стандартный вентиль
UGFF Триггер с потенциальным управлением
UIO Модель входа /выхода цифрового устройства
UPLD Программируемые логические матрицы
UROM Постоянное запоминающее устройство
URAM Оперативное запоминающее устройство
UTGATE Вентиль с тремя состояниями
В директиве .MODEL в круглых скобках указывается список значений параметров модели компонента (если этот список отсутствует или не полный, то недостающие значения параметров модели назначаются по умолчанию). Приведем примеры этой директивы:
.MODEL RLOAD RES (R=1.5 TC1=0.2 TC2=.005)
.MODEL D104D(IS=1E-10)
.MODEL KT315V NPN (IS=1E-11 BF=50 DEV=5% LOT=20%)
.MODEL CK CAP (C=1 DEV=0.1)
.MODEL KT315G AKO:KT315A NPN (BF=130)
Каждый параметр может принимать случайные значения относительно своего номинального значения в соответствии со <спецификацией случайного'разброса значения параметра>, принимаемой во внимание только при статистическом анализе по директивам .МС и .WCASE (п. 4.1.2). Имеются два способа задания температур пассивных компонентов и полупроводниковых приборов (С, L, R, В, D, J, M, Q и Z). Во-первых, по директиве .MODEL задается температура, при которой измерены входящие в нее параметры:
Т_МЕАSUARED=<значение>
Это значение заменяет температуру Tnom, устанавливаемую по директиве .OPTIONS (по умолчанию 27 °С). Во-вторых, можно установить физическую температуру каждого устройства, заменяя глобальную температуру, устанавливаемую по директивам .TEMP, .STEP TEMP или .DC TEMP. Это возможно сделать, задавая:
1) значение абсолютной температуры устройства T_ABS;
2) относительную температуру T_REL_GLOBAL, так что абсолютная температура равна глобальной температуре плюс значение параметра T_REL_GLOBAL;
3) относительную температуру T_REL_LOCAL, так что абсолютная температура данного устройства равна абсолютной температуре устройства-прототипа (модель АКО) плюс значение параметра T_REL_LOCAL.
Описания аналого-цифровых (О) и цифроаналоговых (N) интерфейсов и цифровых устройств (U) приведены в разд. 4.3. Здесь же дадим правила описания аналоговых компонентов.
Модели аналоговых компонентов – пассивные компоненты.
Резисторы описываются предложением
Rxxx <+узел> <-узел> [имя модели] <значение> [ТС=<ТС1>[,<TС2>]]
Здесь ххх — произвольная алфавитно-цифровая последовательность общей длиной не более 7 символов, которая пишется слитно с символом R и вместе с ним образует имя компонента. Например:
R1 1502К
RGEN 1 2 2.4Е4 ТС=0.005
R12 3 О RTEMP 5K
.MODEL RTEMP RES (R=3 DEV=5%TC1=0.01)
Параметры, описывающие модель резистора, приведены в табл. 4.14.
Таблица 4.14. Параметры модели резистора
Обозначение Параметр Размерность Значение по умолчанию
R Масштабный множитель сопротивления — 1
ТС1 Линейный температурный коэффициент сопротивления °с-1 0
ТС2 Квадратичный температурный коэффициент сопротивления оС-2 0
ТСЕ Экспоненциальный температурный коэффициент сопротивления °с 0
T_MEASURED Температура измерения °с —
T_ABS Абсолютная температура °с —
T_REL_GLOBAL Относительная температура °с —
T_REL_LOCAL Разность между температурой устройства и модели-прототипа °с —
Если в описании резистора <имя модели> опущено, то его сопротивление равно параметру <сопротивление> в омах. Если <имя модели> указано и в директиве .MODEL отсутствует параметр ТСЕ, то сопротивление резистора определяется выражением
<значение>-&[ 1+ТС1 (T-Tnom)+TC2(T-Tnom)2];
Если параметр ТСЕ указан, то сопротивление равно <значение>R*1,01ТСЕ(т"Тпоm)
Здесь Т — текущее значение температуры (указывается по директиве .TEMP); Tnom= 27 °С — номинальная температура (указывается по директиве .OPTIONS).
Параметр <значение> может быть как положительным, так и отрицательным, но не равным нулю.
Спектральная плотность теплового тока резистора рассчитывается по формуле Найквиста Si(f)=4kT/<сопротивление>. Для резисторов с отрицательным сопротивлением в этой формуле берется абсолютное значение сопротивления.
Конденсатор описывается предложением
Сххх <+узел> <-узел> [имя модели] <значение> + [IС=<начальное значение напряжения>]
Например:
С1 15056pF
C2390.5pFIC=1.5V
C346CMOD10uF
.MODEL CMOD CAP(C=2.5 TC1=0.01 VC1=0.2)
Параметры модели конденсатора приведены в табл.4.15.
Таблица 4.15. Параметры модели конденсатора
Обозначение Параметр Размерность Значение по умолчанию
С Масштабный множитель емкости — 1
VC1 Линейный коэффициент напряжения в-1 —
VC2 Квадратичный коэффициент напряжения в-2 —
ТС1 Линейный температурный коэффициент емкости оС-1 0
ТС2 Квадратичный температурный коэффициент емкости оС-2 0
T_MEASURED Температура измерения °с —
T_ABS Абсолютная температура °с —
T_REL_GLOBAL Относительная температура °С —
T_REL_LOCAL Разность между температурой устройства и модели-прототипа °С —
Если в описании конденсатора <имя модели> опущено, то его емкость равна параметру <значение> в фарадах, в противном случае она определяется выражением
<значение>-С(1+VVСV+VС2.V2)[1+ТС1(Т-Тпоm) + TC2(T-Tnom)2].
Здесь V — напряжение на конденсаторе при расчете переходных процессов (режим TRAN). При расчете частотных характеристик (режим АС) емкость считается постоянной величиной, определяемой в рабочей точке по постоянному току.
После ключевого слова IC указывается значение напряжения на конденсаторе при расчете режима по постоянному току, которое при расчете переходных процессов служит начальным значением этого напряжения.
Индуктивность описывается предложением
Lxxx<+yзел> <-узел> [имя модели] <значение> + [IС=<начальное значение тока>]
Например:
L1 15020mH
L2 1 2 0.2Е-6
L3 4 6 2VH Ю=2
LOAD 5 12 LMOD 0.03
.MODEL LMOD IND (L=2 DEV=20% IL1=0.1)
Параметры модели индуктивности приведены в табл. 4.16.
Таблица 4.16. Параметры модели индуктивности
Обозначение Параметр Размерность Значение по умолчанию
L Масштабный множитель индуктивности — 1
IC1 Линейный коэффициент тока А-1 —
IC2 Квадратичный коэффициент тока А-2 —
ТС1 Линейный температурный коэффициент индуктивности C-1 0
ТС2 Квадратичный температурный коэффициент индуктивности C-2 0
T_MEASURED Температура измерений °С —
Т_АВС Абсолютная температура °С —
T_REL_GLOBAL Относительная температура °С —
T_REL_LOCAL Разность между температурой устройства и модели-прототипа °С —
Если в описании опущено <имя модели>, то индуктивность равна параметру <значение> в генри, в противном случае она определяется выражением
<значение>-L( 1+IL1.1+IL2.I2)[ I+TC1 (T-Tnom)+TC2(T-Tnom)2].
Здесь I — ток через катушку индуктивности при расчете переходных процессов (режим TRAN). При расчете частотных характеристик (режим АС) индуктивность считается постоянной величиной, определяемой в рабочей точке по постоянному току.
После ключевого слова IC указывается значение тока через катушку индук-тивностей при расчете режима по постоянному току, которое при расчете переходных процессов служит начальным значением этого тока.
Взаимная индуктивность описывается следующим предложением
Кххх Lyyy Lzzz... <коэффициент связи>
Порядок перечисления имен индуктивностей Lyyy, Lzzz, ... безразличен, знак взаимной индуктивности определяется порядком перечисления узлов в описании каждой индуктивности. Параметром взаимной индуктивности является <коэффициент связи>. Если в трансформаторе имеется несколько обмоток, то можно либо определить взаимные индуктивности для каждой попарной комбинации обмоток в отдельных предложениях, либо в одном предложении указать список всех индуктивностей, имеющих одинаковый коэффициент связи. Например, трехобмоточный высокочастотный трансформатор (рис. 4.9) описывается следующим образом:
I1 1 0АС1МА L1 1 010UH L22310UH L33410UH K12L1 L2L30.8
Здесь I1 — источник тока, комплексная амплитуда которого в режиме АС имеет значение 1 мА. Первый узел в описаниях индуктивностей LI, L2, L3 обозначает начало обмотки.
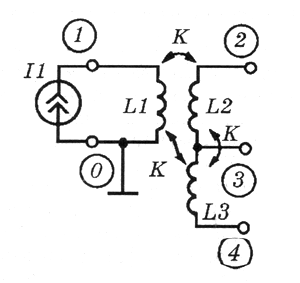
Рис. 4.9. Трехобмоточный трансформатор
Коэффициент связи двух обмоток определяется выражением
коэффициент связи = Mij/ (корень LiLj)
где Li Lj — индуктивности обмоток;
Mtj — их взаимная индуктивность.
Напряжение на катушке Li с учетом взаимной индукции определяется выражением
Vi = Li *dli/dt+ Мij*dli/dt + Мik *dlk/dt+...
Модели аналоговых компонентов – идеальные ключи.
Ключи, управляемые напряжением или током, используются при расчете переходных процессов.
Ключ, управляемый напряжением, описывается предложением
Sxxx <+узел> <-узел> <+ управляющий узел> <- управляющий узел> + <имя модели>
Здесь <+узел> и <-узел> — номера узлов, к которым подсоединен ключ; <+управляющий узел>, <- управляющий узел> — номера узлов, разность потенциалов которых управляет ключом.
Параметры ключа задаются по директиве
.MODEL <имя модели> VSWITCH (VОN=<значение>VОFF==<значение> +RON=<значение> ROFF=<значеные>)
Параметры модели ключа, управляемого напряжением, приведены в табл. 4.19.
Таблица 4.19. Параметры модели ключа, управляемого напряжением
Обозначение Параметр Размерность Значение по умолчанию
VON Напряжение замыкания ключа В 1
VOFF Напряжение размыкания ключа В 0
RON Сопротивление замкнутого ключа Ом 1
ROFF Сопротивление разомкнутого ключа Ом 106
Если VON > VOFF, то ключ замкнут при управляющем напряжении Vупр > VON и разомкнут при Vупр < VOFF. На интервале VOFF < Vynp < VON сопротивление ключа плавно изменяется от значения ROFF до RON. Если VON < VOFF, то ключ замкнут при Vynp < VON и разомкнут при Vynp > VOFF.
Спектральная плотность тока теплового шума ключа равна S, = 4kT / Rs Ключ, управляемый током независимого источника напряжения, описывается предложением
Wxxx <+узел> <-узел> <имя управляющей ветви> <имя модели>
Здесь <имя управляющей ветви> - имя источника напряжения (его ЭДС может быть равна нулю), ток через который управляет ключом. Параметры ключа задаются по директиве
.MODEL <имя модели> ISWITCH (ION=<значение> IOFF=<значение>
+ RON=<значение> ROFF=<значеные>)
Смысл этих параметров такой же, как для ключа, управляемого напряжением, только параметр ION по умолчанию равен 1 мА. Приведем пример описания ключа, управляемого током:
VCONT 420
W1 6, 3 VCONT SW
.MODEL SW ISWITCH (ION=50MA IOFF=45MA)
Ключ, управляемый во времени, реализуется путем подключения к ключу, управляемому током или напряжением, источника переменного во времени сигнала.
Модели аналоговых компонентов – независимые источники сигналов.
Стандартные сигналы
Независимые источники напряжения (V) и тока (I) стандартного вида описываются предложениями
Vxxx <+узел> <-узел> [[DC] <значение>] [АС <модуль> [<фаза>]] + [STIMULUS=<имя сигнала>] + [спецификация сигнала]
Ixxx <+узел> <-узел> [[DC] <значение>] [АС <модуль> [<фаза>]] + [STIMULUS=<имя сигнала>] + [спецификация сигнала]
После ключевого слова STIMULUS указывается имя сигнала, созданного с помощью программы Stimulus Editor. При анализе переходных процессов можно использовать один из стандартных сигналов с помощью конструкции <спецификация сигнала>, имеющей вид:
PULSE <параметры> - импульсный сигнал;
SIN <параметры> - синусоидальный сигнал;
ЕХР <параметры> - сигнал экспоненциальной формы;
PWL <параметры> - кусочно-линейный сигнал;
SFFM <параметры> - гармонический сигнал с синусоидальной частотной модуляцией.
Источники могут использоваться во всех видах анализа. По умолчанию все параметры принимают нулевые значения. Параметр DC определяет постоянную составляющую источника напряжения или тока. Для режима АС задаются модуль и фаза (в градусах) источника гармонического сигнала. Приведем примеры:
IBIAS 1302.3MA
VAC 2 3 АС .001
VACPHS 2 3 АС .001 90
13 26 77 DC 0.002 АС 1 SIN(.002 0.05 1.5MEG)
При анализе переходных процессов задаются следующие виды временных зависимостей.
Экспоненциальная функция задается списком параметров
ЕХР (y1 у2 td tcr tr tfr)
и описывается выражением
y, при 0 < t < td;
У1 + (У2 -y(){l-exp[-(t-td) / tcr]}uputd <t<t/, '
yl+(y2-yl){l-exp[-(t-td)/tCГ}-1 + exp[-(t - tr) / tlr]}npu tr < t < TSTEP.
График этой функции приведен на рис. 4.12, а назначение ее параметров объясняется в табл. 4.20.
Таблица 4.20. Параметры экспоненциального сигнала
Обозначение Параметр Размерность Значение по умолчанию
y1 Начальное значение В или А -
y2 Максимальное значение В или А -
td Начало переднего фронта с 0
tcr Постоянная времени переднего фронта с TSTEP*
tr Начало заднего фронта с td + TSTEP
tfr Постоянная времени заднего фронта с TSTEP
* TSTEP - шаг по времени вывода на печать результатов расчетов переходных процессов (задается в директиве .TRAN).
Приведем пример описания источника напряжения экспоненциальной формы: V1 3 4 ЕХР (0.02 2NS 20NS 40NS 20NS)

Рис. 4.12. Экспоненциальная функция
Импульсная функция (рис. 4.13) задается списком параметров
PULSE (y1 y2 td tr tf т Т)
Смысл ее параметров объясняется в табл. 4.21.
Таблица 4.21. Параметры импульсного сигнала
Обозначение Параметр Размерность Значение по умолчанию
y1 Начальное значение В или А -
y2 Максимальное значение В или А -
td Начало переднего фронта с 0
tr Длительность переднего фронта с TSTEP*
ti Длительность заднего фронта с TSTEP
т Длительность плоской части импульса с TSTOP**
Т Период повторения с TSTOP
* TSTEP - шаг вывода на печать. ** TSTOP - конечное время анализа переходного процесса (параметры TSTEP и TSTOP задаются в директиве .TRAN).

Рис. 4.13. Импульсная функция
Кусочно-линейная функция задается списком параметров
PWL [TIME_SCALE_FACTOR=<значение>] [VALUE_SCALE_FACTOR=<значение>]
+ (точки_отсчета)*
В секции (точки_отсчета) помещаются следующие данные:
(<tn .yn>) - координаты точек;
FILE <имя файла> - чтение координат точек из файла;
REPEAT FOR <п> (точки__отсчета)* ENDREPEAT - повторение п раз;
REPEAT FOREVER (точки_отсчета)* ENDREPEAT -- бесконечное повторение.
PWL представляет собой кусочно-линейную функцию y(t). Соседние точки соединяются прямыми линиями (рис. 4.24). Максимальное количество точек для IBM PC составляет 3995.

Рис. 4.14. Кусочно-линейная функция
Приведем примеры.
1) Ступенчатое напряжение - 10 периодов по 1 мкс:
.PARAM N=1
.STEPPARAMN 1,5,1
V1 1 О PWL TIME_SCALE_FACTOR= 1е-6; Время задано в мкс
+ REPEAT FOR 10
+ (.25, 0) (.26, {N}) (.99, {N}) (1,0)
+ ENDREPEAT .
2) Считывание сигнала из файла:
V2 1 О PWL FILE triangle. in
В текстовом файле triangle. in содержатся значения отсчетов, например
(1ms, 1) (2ms, 0) (3ms, 1) (4ms, 0)
Синусоидальная функция задается списком параметров SIN fo и описывается выражением
Ее параметры описаны в табл. 4.22.
Таблица 4.22. Параметры гармонического сигнала
Обозначение Параметр Размерность Значение по умолчанию
Уо Постоянная составляющая В или А -
Уа Амплитуда В или А
f Частота Гц 1/TSTOP
td Задержка с 0
d, Коэффициент затухания 1/с 0
Ф Фаза град. 0
На рис. 4.15, а приведен график функции при df = 0, а на рис. 4.15, б - при df>0.
 а)
а)
Синусоидальная функция с частотной модуляцией задается списком параметров
SFFM (уо уа fc m fm)
и описывается выражением
y(t) = yо + yasin[2nfct + msin(2лfmt]
Ее параметры приведены в табл. 4.23.
Таблица 4.23. Параметры частотно-модулированного сигнала
Обозначение Параметр Размерность Значение по умолчанию
Уо Постоянная составляющая В или А -
Уа Амплитуда В или А -
fc Частота несущей Гц 1/TSTOP
т Индекс частотной модуляции - 0
1т Частота модуляции Гц 1/TSTOP
Модели аналоговых компонентов – зависимые источники сигналов.
Зависимые источники напряжения и тока могут быть как линейными, так и нелинейными. Существует четыре их разновидности:
v = e(v) - источник напряжения, управляемый напряжением (ИНУН);
i = f(i) - источник тока, управляемый током (ИТУТ);
i = g(v) - источник тока, управляемый напряжением (ИТУН);
v = h(i) - источник напряжения, управляемый током (ИНУТ).
Линейные управляемые источники описываются зависимостями v = ev, i = fi, i = gv, v = hi, где е, f, g и h - коэффициенты передачи.
В описании нелинейных зависимых источников у = у(х1, х2, ..., хп) используется полиномиальная функция POLY вида
У = P0 + P1x1 + P2x2+...+ Pnxn ...
Здесь х1, хг, ..., хп - п управляющих переменных. Они могут быть токами или разностью потенциалов; одновременное управление током и разностью потенциалов не допускается. Все коэффициенты полинома Я вводить не обязательно, но вводить их необходимо подряд без пропусков. При одномерном управлении (п = 1) допускается следующая форма полинома у(х):
При п = 2 полином приобретает вид
y = Р0 + P1x1 + Р2х2 + P3x21 + Р4х1х2 + Р5х2
Рассмотрим подробно все четыре типа зависимых источников. Источник напряжения, управляемый напряжением (ИНУН), задается предложениями:
1) линейный источник:
Еххх <+узел> <-узел> <+управляющий узел> <-управляющий узел> + <коэффициент передачи>
2) нелинейный источник:
Еххх <+узел> <-узел> POLY(<n>)<< +управляющий узел> + <-управляющий узел>>* + <коэффициент полинома>*
Например, линейный источник ELIN=2,5V10.11 описывается предложением
ELIN121011 2.5
Нелинейный источник ENONLIN = 0 + 13,6V3,0 + 0,2V4,6 + 0,0051V3,0 (рис. 4.16, a)- предложением
ENONLIN 50 51 POLY(2) (3,0) (4,6) 0.0 13.6 0.2 0.005
Источник тока, управляемый током (ИТУТ), задается следующим образом:
1) линейный источник:
Fxxx <+узел> <-узел> <имя управляющего источника напряжения> + <коэффициент передачи>
2) нелинейный источник:
Fxxx <+узел> <-узел> POLY(<n>)
+ <имя управляющего источника напряжения>*
+ <коэффициент полинома>*
Управляющим током служит ток независимого источника напряжения. Например, линейный источник тока F1=7,5IV4 (рис. 4.16, б) описывается предложением .
F1 2 1 V4 7.5
Нелинейный источник тока -
FNONLIN = 0,01 + 13,6IVС1 + 0,2IVС2 + 0,0054, + 0,001IVC1IVС2
предложением
FNONLIN1011 POLY(2)VC1 VC2 0.01 13.60.20.0050.001
Источник тока, управляемый напряжением (ИТУН), задается предложениями:
1) линейный источник:
Gxxx <+узел> <-узел> <+управляющий узел> <-управляющий узел> + <коэффициент передачи>
2) нелинейный источник:
Gxxx <+узел> <-узел> POLY(<n>) «+управляющий узел> + <-управляющий узел>>* <коэффициент полинома>*
Источник напряжения, управляемый током (ИНУТ), задается следующим образом:
1) линейный источник:
Нххх <+узел> <-узел> <имя управляющего источника напряжения> + <коэффициент передачи>
2) нелинейный источник:
Нххх <+узел> <-узел> POLY(<m>)
+ <имя управляющего источника напряжения>*
+ <коэффициент полинома>*
Модели аналоговых компонентов – аналоговые функциональные блоки.
Аналоговые функциональные блоки моделируются с помощью источников напряжения (Е) или тока (G). В отличие от рассмотренных выше зависимых источников здесь разрешается использовать параметры и любые функции от узловых потенциалов, токов (через независимые источники напряжения) и времени.
Нелинейные передаточные функции задаются по формату
Еххх <+узел> <-узел> VALUE={<выражение>}
Gххх<+узел> <-узел>VALUE={<выражение>}
После ключевого слова VALUE в фигурных скобках приводится алгебраическое выражение, зависящее от узловых потенциалов, разности узловых потенциалов, токов через независимые источники напряжения и времени, например
ESIGNAL 2 0 VALUE={50mV* SIN(6.28*100kHz*TIME)*V(3,4)} GPW 6 О VALUE={V(5)*I(VP)}
Здесь для текущего времени выделено ключевое слово TIME. .
Область управляемых источников с нелинейным законом управления очень обширна. В частности, нелинейные проводимости или резисторы имитируются в программе PSpice с помощью источников напряжения, управляемых собственным током, или источников тока, управляемых собственным напряжением. Пример имитации нелинейного резистора дан на рис. 4.20; его описание имеет вид
G 1 2 VALUE={F(V(G))}