

SВопрос №27 (Момент импульса частицы относительно точки, относительно оси)
Д ля
отдельно взятой частицы моментом
импульса относительно точки O
называется псевдовектор M
= [rp]
= [r(mv)].
Моментом импульса системы относительно
точки O
называется векторная сумма моментов
импульсов частиц, входящих в систему:
ля
отдельно взятой частицы моментом
импульса относительно точки O
называется псевдовектор M
= [rp]
= [r(mv)].
Моментом импульса системы относительно
точки O
называется векторная сумма моментов
импульсов частиц, входящих в систему:
![]() .
Проекция вектора M
на некоторую ось z
называется моментом импульса частицы
относительно этой оси: Mz
= [rp]пр
z.
Моментом импульса системы относительно
оси z
называется величина
.
Проекция вектора M
на некоторую ось z
называется моментом импульса частицы
относительно этой оси: Mz
= [rp]пр
z.
Моментом импульса системы относительно
оси z
называется величина
![]() .
Из
рисунка видно, что модуль вектора момента
импульса частицы равен M
= rpsin
= lp,
где l=rsin
- длина перпендикуляра, опущенного из
точки O
на прямую, вдоль которой направлен
импульс частицы. Эта длина называется
плечом импульса относительно точки O.
Рисунок выполнен в предположении, что
точка O,
относительно которой берется момент,
и вектор p
лежат в плоскости рисунка. Вектор M
перпендикулярен плоскости рисунка и
направлен «от нас».
.
Из
рисунка видно, что модуль вектора момента
импульса частицы равен M
= rpsin
= lp,
где l=rsin
- длина перпендикуляра, опущенного из
точки O
на прямую, вдоль которой направлен
импульс частицы. Эта длина называется
плечом импульса относительно точки O.
Рисунок выполнен в предположении, что
точка O,
относительно которой берется момент,
и вектор p
лежат в плоскости рисунка. Вектор M
перпендикулярен плоскости рисунка и
направлен «от нас».
Вопрос №28 (Момент силы относительно точки и относительно оси. Пара сил)
П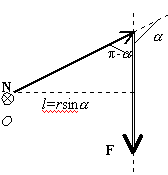 севдовектор
N
= [rF]
называется моментом силы F
относительно точки O,
из которой проводится радиус-вектор r
точки приложения силы. Из рисунка видно,
что модуль момента силы можно представить
следующим образом: N
= rFsin
=
lF,
где l
= rsin
- плечо силы относительно точки O
(т.е. длина перпендикуляра, опущенного
из точки O
на прямую, вдоль которой действует
сила). Проекция вектора N
на некоторую ось z,
проходящую через точку O,
относительно которой определен
псевдовектор N,
называется моментом силы относительно
этой оси: Nz
= [rF]пр
z.
Две
равные по модулю противоположно
направленные силы, не действующие вдоль
одной прямой, называются парой сил.
Расстояние l
между прямыми, вдоль которых действуют
силы, называется плечом пары. Суммарный
момент образующих пару сил F1
и F2
равен N
= [r1F1]
+ [r2F2].
Учтя, что F1
= -F2,
можно написать: N
= -[r1F1]
+ [r2F2]
= [(r2
– r1)F2]
= [r12F2],
где r12
= r2
– r1
– вектор, проведенный из точки приложения
силы F1
в точку приложения силы F2.
Выражение не зависит от выбора точки
O.
Следовательно, момент пары сил относительно
любой точки будет один и тот же. Вектор
момента пары сил перпендикулярен к
плоскости, в которой лежат силы, и
численно равен произведению модуля
любой из сил на плечо.
севдовектор
N
= [rF]
называется моментом силы F
относительно точки O,
из которой проводится радиус-вектор r
точки приложения силы. Из рисунка видно,
что модуль момента силы можно представить
следующим образом: N
= rFsin
=
lF,
где l
= rsin
- плечо силы относительно точки O
(т.е. длина перпендикуляра, опущенного
из точки O
на прямую, вдоль которой действует
сила). Проекция вектора N
на некоторую ось z,
проходящую через точку O,
относительно которой определен
псевдовектор N,
называется моментом силы относительно
этой оси: Nz
= [rF]пр
z.
Две
равные по модулю противоположно
направленные силы, не действующие вдоль
одной прямой, называются парой сил.
Расстояние l
между прямыми, вдоль которых действуют
силы, называется плечом пары. Суммарный
момент образующих пару сил F1
и F2
равен N
= [r1F1]
+ [r2F2].
Учтя, что F1
= -F2,
можно написать: N
= -[r1F1]
+ [r2F2]
= [(r2
– r1)F2]
= [r12F2],
где r12
= r2
– r1
– вектор, проведенный из точки приложения
силы F1
в точку приложения силы F2.
Выражение не зависит от выбора точки
O.
Следовательно, момент пары сил относительно
любой точки будет один и тот же. Вектор
момента пары сил перпендикулярен к
плоскости, в которой лежат силы, и
численно равен произведению модуля
любой из сил на плечо.
Вопрос №29 (Уравнение моментов для системы взаимодействующих частиц)
Силы
взаимодействия между частицами действуют
в противоположные стороны вдоль одной
и той же прямой. Их моменты относительно
произвольной точки O
равны по модулю и противоположны по
направлению. Поэтому моменты внутренних
сил попарно уравновешивают друг друга,
и сумма моментов всех внутренних сил
для любой системы частиц, в частности
для твердого тела, всегда равна нулю:
![]() .
В соответствиями с определениями
и N
= [rF]
уравнение
.
В соответствиями с определениями
и N
= [rF]
уравнение
![]() можно записать следующим образом:
можно записать следующим образом:
 .
.
Вопрос №30 (Закон сохранения момента импульса системы взаимодействующих частиц)
Из
 вытекает, что при отсутствии внешних
сил dM/dt
= 0. Следовательно, для замкнутой системы
вектор M
постоянен. Это утверждение составляет
содержание закона сохранения момента
импульса, который формулируется следующим
образом: момент
импульса замкнутой системы материальных
точек остается постоянным.
Мы доказали соотношение
для
системы из двух частиц. Однако его легко
обобщить на случай любого числа частиц.
Напишем уравнения движения частиц:
вытекает, что при отсутствии внешних
сил dM/dt
= 0. Следовательно, для замкнутой системы
вектор M
постоянен. Это утверждение составляет
содержание закона сохранения момента
импульса, который формулируется следующим
образом: момент
импульса замкнутой системы материальных
точек остается постоянным.
Мы доказали соотношение
для
системы из двух частиц. Однако его легко
обобщить на случай любого числа частиц.
Напишем уравнения движения частиц:
![]() (от 1 до N
частиц). Умножив каждое из уравнений на
соответствующий радиус-вектор, получим:
(от 1 до N
частиц). Умножив каждое из уравнений на
соответствующий радиус-вектор, получим:
![]() (от 1 до N
частиц). Сложим почленно все N
уравнений:
(от 1 до N
частиц). Сложим почленно все N
уравнений:
![]() .
Первая сумма в правой части представляет
собой сумму моментов всех внутренних
сил, которая, равна нулю (
).
Вторая сумма справа есть сумма моментов
внешних сил. Следовательно, мы пришли
к формуле
.
Отметим, что момент импульса остается
постоянным и для незамкнутой системы
при условии, что суммарный момент внешних
сил равен нулю. Спроецировав все величины,
входящие в уравнение
,
на некоторое направление z,
получим соотношение
.
Первая сумма в правой части представляет
собой сумму моментов всех внутренних
сил, которая, равна нулю (
).
Вторая сумма справа есть сумма моментов
внешних сил. Следовательно, мы пришли
к формуле
.
Отметим, что момент импульса остается
постоянным и для незамкнутой системы
при условии, что суммарный момент внешних
сил равен нулю. Спроецировав все величины,
входящие в уравнение
,
на некоторое направление z,
получим соотношение
![]() ,
согласно которому производная по времени
от момента импульса системы относительно
оси z
равна сумме моментов внешних сил
относительно этой оси. Отсюда же следует,
что в том случае, когда сумма внешних
сил относительно некоторой оси равна
нулю, момент импульса системы относительно
этой оси остается постоянным. В заключение
отметим, что без указания точки или оси,
относительно которых определяется
момент, понятия момента импульса и
момента силы утрачивают смысл.
,
согласно которому производная по времени
от момента импульса системы относительно
оси z
равна сумме моментов внешних сил
относительно этой оси. Отсюда же следует,
что в том случае, когда сумма внешних
сил относительно некоторой оси равна
нулю, момент импульса системы относительно
этой оси остается постоянным. В заключение
отметим, что без указания точки или оси,
относительно которых определяется
момент, понятия момента импульса и
момента силы утрачивают смысл.
Вопрос №31 (Преобразование момента импульса системы частиц при переходе в систему центра масс)
MO = MC + [RC, p], где MO – момент импульса системы МТ относительно начала O л-системы, MC – момент импульса относительно центра масс C (собственный момент импульса), RC – радиус-вектор центра масс в л-системе, p – суммарный импульс системы точек, определенный в л-системе. Воспользуемся соотношениями: Ri = RC + ri, Vi = vC + vi (см. билет 24). По определению MO = mi[RiVi] = mi[(RC + ri)(VC + vi)] = mi[RCVC] + mi[RCvi] + mi[riVC] + mi[rivi]. Первое слагаемое можно написать в виде [RC, mVC] = [RCp]. Второе слагаемое [RC, mivi] = [RC, mvC] = 0 (так как VC – скорость центра масс в ц-системе – есть нуль). Третье слагаемое [miri, VC] = [mrC, VC] = 0 (потому что rC – радиус-вектор центра масс в ц-системе – есть нуль). Четвертое слагаемое представляет собой MC – момент импульса системы МТ в ц-системе. Таким образом, MO=MC+[RC, p], что и требовалось доказать.