

1.3.3. Классификация видов деформирования
Внутренние силовые факторы имеют ярко выраженный физический смысл. Каждому из них соответствует определенный вид деформирования.
Если в поперечном сечении бруса возникает только нормальная сила (N≠0), то в зависимости от направления этой силы деформирование называют растяжением или сжатием.
Если в поперечном сечении бруса действует только крутящий момент (Мк≠0), то деформирование называют кручением.
Если в поперечном сечении бруса возникает только изгибающий момент (Мх≠0 или Му≠0), то деформирование называют чистым изгибом.
Если в поперечном сечении бруса возникает только поперечная сила (Qy≠0 или Qx≠0), то деформирование называют сдвигом (срезом).
Перечисленные четыре вида деформирования (сопротивления) называют простыми, всякое их сочетание называют сложным деформированием (сложным сопротивлением).
1.3.4. Напряжения
В дальнейшем
рассматривается механическое напряжение.
Внутренние силы распределены по сечению
бруса в общем случае неравномерно.
Обратимся вновь к рассмотрению правой
отсеченной части бруса, площадь
поперечного сечения которого равна
![]() (рис. 1.3). Выделим в этом сечении в
окрестности некоторой произвольной
точки К достаточно малую площадку
(рис. 1.3). Выделим в этом сечении в
окрестности некоторой произвольной
точки К достаточно малую площадку
![]() и обозначим равнодействующую внутренних
сил, передаваемых через эту площадку,
через
и обозначим равнодействующую внутренних
сил, передаваемых через эту площадку,
через
![]() .
Отношение
.
Отношение
![]() называют полным средним напряжением
на рассматриваемой площадке. Для
определения истинного полного напряжения
в точке
называют полным средним напряжением
на рассматриваемой площадке. Для
определения истинного полного напряжения
в точке
![]() необходимо контур площадки стянуть к
этой точке, то есть осуществить предельный
переход при
необходимо контур площадки стянуть к
этой точке, то есть осуществить предельный
переход при
![]() .
Этот переход возможен, так как согласно
гипотезе сплошности материала внутренние
силы распределены непрерывно по всему
сечению.
.
Этот переход возможен, так как согласно
гипотезе сплошности материала внутренние
силы распределены непрерывно по всему
сечению.
Р ис.
1.3
ис.
1.3
Вектор
![]() (1.2)
(1.2)
называется полным
напряжением в рассматриваемой точке
сечения. Произвольно ориентированный
в пространстве вектор полного напряжения
![]() для удобства использования в расчетах
обычно раскладывают на составляющие
(см. рис. 1.3). Проекцию этого вектора на
нормаль к площадке обозначают
для удобства использования в расчетах
обычно раскладывают на составляющие
(см. рис. 1.3). Проекцию этого вектора на
нормаль к площадке обозначают
![]() и называют нормальным напряжением.
Проекцию
на плоскость сечения обозначают τ и
называют касательным напряжением.
Касательное напряжение τ в свою очередь
раскладывают по двум взаимно
перпендикулярным направлениям в
плоскости площадки и получают
и называют нормальным напряжением.
Проекцию
на плоскость сечения обозначают τ и
называют касательным напряжением.
Касательное напряжение τ в свою очередь
раскладывают по двум взаимно
перпендикулярным направлениям в
плоскости площадки и получают
![]() и
и
![]() .
.
Разложение полного
напряжения на нормальное и касательное
имеет определенный физический смысл.
Нормальные силы, мерой интенсивности
которых является
,
стремятся сблизить или отдалить частицы
материала друг от друга, что может
привести к разрушению тела в результате
отрыва частиц. Касательные внутренние
силы, мерой интенсивности которых
является τ, вызывают сдвиг частиц
материала друг относительно друга, что
может привести к разрушению тела в
результате взаимного сдвига частиц.
Как следует из (1.2), напряжение - это
интенсивность внутренних сил, то есть
величина внутренних сил взаимодействия,
приходящихся на единицу площади,
выделенной в окрестности рассматриваемой
точки. Единицей измерения напряжения
является Паскаль
![]() .
Так как Паскаль - очень малая величина,
то в практических расчетах обычно
используют более крупную величину –
мегапаскаль
.
Так как Паскаль - очень малая величина,
то в практических расчетах обычно
используют более крупную величину –
мегапаскаль
![]() .
В дальнейшем предполагается, что в теле,
свободном от нагрузок, напряжений нет,
то есть используется так называемая
гипотеза естественной ненапряженности.
.
В дальнейшем предполагается, что в теле,
свободном от нагрузок, напряжений нет,
то есть используется так называемая
гипотеза естественной ненапряженности.
1.4. Перемещения и деформации
1.4.1. Перемещения
Рассмотрим тело,
на которое наложены связи таким образом,
что перемещения этого тела как жесткого
целого исключены (рис. 1.4). Такие тела
называют кинематически (геометрически)
неизменяемыми, и перемещения отдельных
точек и сечений такого тела определяются
только его деформацией. В дальнейшем
рассматриваются только такие системы.
Рассмотрим в недеформированном теле
некоторую произвольную точку (частицу)
А. В результате действия на тело
уравновешенной системы внешних сил оно
продеформируется, положение этой точки
изменится, и она переместится в положение
А1. Вектор S, имеющий начало в точке
недеформированного тела, а конец в этой
же точке деформированного тела, называется
вектором полного линейного перемещения
этой точки (частицы). Проекции полного
линейного перемещения на координатные
оси x, y, z
называются линейными перемещениями
точки по осям и обозначаются через
![]() ,
,
![]() и
и
![]() (см. рис. 1.4) или
(см. рис. 1.4) или
![]() ,
,
![]() и
и
![]() .
.
Р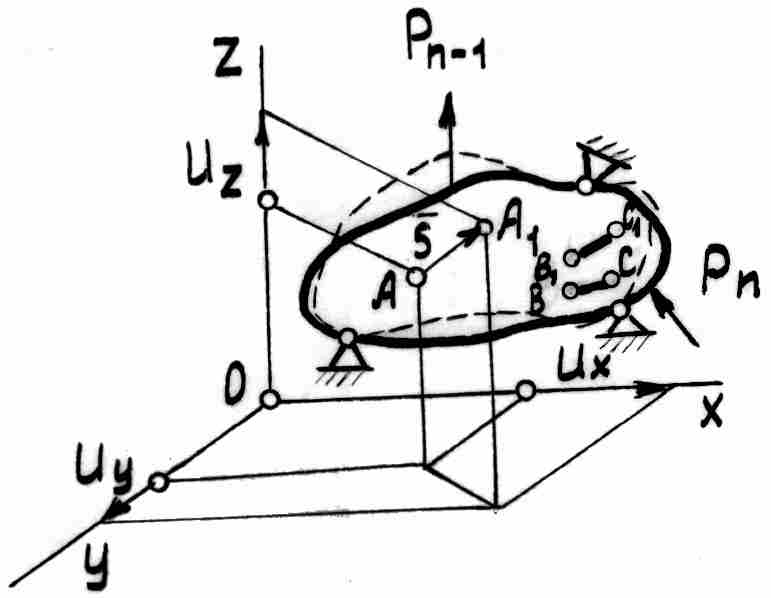 ис.
1.4
ис.
1.4
Подобно линейным можно вывести в рассмотрение и угловые перемещения. Рассмотрим достаточно малый линейный элемент тела, занимающий до нагружения положение ВС, а после приложения нагрузок – В1С1. При деформировании тела рассматриваемый элемент поворачивается. Угол поворота элемента называется угловым перемещением, он характеризуется вектором, который тоже можно разложить по осям x, y, z . Таким образом, угловое перемещение – это угол между направлениями элемента соответственно до и после деформирования.