

Федеральное агентство по образованию
Волгоградский Государственный Технический Университет
Кафедра «Автомобиле- и тракторостроение»,
Семестровая работа
По курсу: Системы автоматизированного проектирования
Автоматизированные расчеты при проектировании тракторов
Выполнил:
Студ,гр, Т-502Т
Герасимов Д,А,
Проверил:
Шеховцов В,В,
Волгоград 2011г,
ПРОЕКТИРОВАНИЕ НЕЛИНЕЙНОЙ (РАВНОЧАСТОТНОЙ) ХАРАКТЕРИСТИКИ ПОДВЕСКИ - ORV
Программа ORV содержит около 200 операторов, Она предназначена для расчета приведенной характеристики подвески транспортного средства, унифицированной для всех точек подвески, При этом обеспечивается заданная конструктором-проектировщиком частота собственных вертикальных колебаний подрессореной массы, Может быть использована для проектирования нелинейной характеристики любых подрессоренных обьектов (кабина, двигатель и т,д,)
Исходные данные ORV1
Идентифи- катор |
Наименование параметра |
Единица измерения |
Возможн, значение |
Величина |
PS |
Средняя статическая нагрузка га данную опору |
Н |
0+100 000 |
8500 |
FZ |
Частота собственных вертикальных колебаний |
Гц |
1+50 |
2 |
CP |
Относительная величина предварительного поджатия упругого элемента |
--- |
0+0,6 |
0,3 |
A4 |
Относительная минимальная статическая нагрузка (по отношению к Pст) |
--- |
0+1 |
0,6 |
A2 |
Относительная максимальная статическая нагрузка (по отношению Pст) |
--- |
1+10 |
2,5 |
DK |
Коэффициент динамичности при максимальной статической нагрузке |
--- |
1+9 |
2 |
Выходные данные ORV1
|
P(I) H |
F(I) MM |
1 |
0 |
0 |
2 |
1530 |
0,5 |
3 |
5100 |
44 |
4 |
6715 |
61 |
5 |
8330 |
74,4 |
6 |
9945 |
85,4 |
7 |
11560 |
94,8 |
8 |
13175 |
102,9 |
9 |
14790 |
110,1 |
10 |
16405 |
116,5 |
11 |
18020 |
122,4 |
12 |
19635 |
127,7 |
13 |
21250 |
132,6 |
14 |
22865 |
137,6 |
15 |
42500 |
192,5 |
Исходные данные ORV2
Идентифи- катор |
Наименование параметра |
Единица измерения |
Возможн, значение |
Величина |
PS |
Средняя статическая нагрузка га данную опору |
Н |
0+100 000 |
8500 |
FZ |
Частота собственных вертикальных колебаний |
Гц |
1+50 |
4 |
CP |
Относительная величина предварительного поджатия упругого элемента |
--- |
0+0,6 |
0,3 |
A4 |
Относительная минимальная статическая нагрузка (по отношению к Pст) |
--- |
0+1 |
0,6 |
A2 |
Относительная максимальная статическая нагрузка (по отношению Pст) |
--- |
1+10 |
2,5 |
DK |
Коэффициент динамичности при максимальной статической нагрузке |
--- |
1+9 |
2 |
Выходные данные ORV2
|
P(I) H |
F(I) MM |
1 |
0 |
0 |
2 |
1530,0 |
0,1 |
3 |
5100,0 |
11,0 |
4 |
6715,0 |
15,3 |
5 |
8330,0 |
18,6 |
6 |
9945,0 |
21,4 |
7 |
11560,0 |
23,7 |
8 |
13175,0 |
25,7 |
9 |
14790,0 |
27,5 |
10 |
16405,0 |
29,1 |
11 |
18020,0 |
30,6 |
12 |
19635,0 |
31,9 |
13 |
21250,0 |
33,2 |
14 |
22865,0 |
34,3 |
15 |
42500,0 |
48,1 |
Исходные данные ORV3
Идентифи- катор |
Наименование параметра |
Единица измерения |
Возможн, значение |
Величина |
PS |
Средняя статическая нагрузка га данную опору |
Н |
0+100 000 |
8500 |
FZ |
Частота собственных вертикальных колебаний |
Гц |
1+50 |
8 |
CP |
Относительная величина предварительного поджатия упругого элемента |
--- |
0+0,6 |
0,3 |
A4 |
Относительная минимальная статическая нагрузка (по отношению к Pст) |
--- |
0+1 |
0,6 |
A2 |
Относительная максимальная статическая нагрузка (по отношению Pст) |
--- |
1+10 |
2,5 |
DK |
Коэффициент динамичности при максимальной статической нагрузке |
--- |
1+9 |
2 |
Выходные данные ORV3
|
P(I) H |
F(I) MM |
1 |
0 |
0 |
2 |
1530 |
0 |
3 |
5100 |
2,7 |
4 |
6715 |
3,8 |
5 |
8330 |
4,7 |
6 |
9945 |
5,3 |
7 |
11560 |
5,9 |
8 |
13175 |
6,4 |
9 |
14790 |
6,9 |
10 |
16405 |
7,3 |
11 |
18020 |
7,6 |
12 |
19635 |
8,0 |
13 |
21250 |
8,3 |
14 |
22865 |
8,6 |
15 |
42500 |
12,0 |
По результатам расчета строим графические зависимости

Вывод: При изменении частоты f собственных вертикальных колебаний c 2 Гц до 8 Гц с увеличением силы приведенной характеристики P(I), значение деформации приведенного упругого элемента уменьшается.
Расчет необходимой характеристики торсиoна - tor
Программа содержит около 100 операторов.
TOR позволяет получить необходимую зависимость момента закрутки от угла поворота балансира (рычага) подвески (например, упругую характеристику торсионного узла) по заданной приведенной характеристике подвески. Расчитываются также ориентировочные размеры рабочей части торсиона круглого сечения.
Исходные данные TOR1
Идентифи-катор |
Наименование параметра |
Возможные значения |
Размерность |
Величина |
N |
Число задаваемых точек приведенной характеристики |
2+20 |
--- |
14 |
DL(j) |
Координаты каждой точки характеристики по перемещению |
0.1+1 000 |
мм |
ORV1 |
A |
Длина балансира |
10+3 000 |
мм |
300. |
Q(j) |
Координаты каждой точки характеристики по силе |
0.1+900 000 |
Н |
ORV1 |
HN |
Расстояние по вертикали от оси качания балансира до оси катка при полной разгрузке подвески |
1 000 |
мм |
150 |
Выходные данные TOR1
I H(MM) F(GRA) DH(MM) QS(H) T(HM) FF(GRA)
1 150.0 30.0 .0 .0 .0 .0
2 139.9 27.8 10.1 2318.3 615.2 2.2
3 129.8 25.6 20.2 3147.6 851.3 4.4
4 119.7 23.5 30.3 3977.0 1094.0 6.5
5 109.6 21.4 40.4 4806.3 1342.3 8.6
6 99.5 19.4 50.5 5720.0 1618.9 10.6
7 89.4 17.3 60.6 6680.0 1913.0 12.7
8 79.3 15.3 70.7 7888.5 2282.5 14.7
9 69.2 13.3 80.8 9275.8 2707.8 16.7
10 59.1 11.4 90.9 10898.1 3205.5 18.6
11 48.9 9.4 101.1 12806.7 3790.5 20.6
12 38.8 7.4 111.2 15057.0 4479.1 22.6
13 28.7 5.5 121.3 17708.8 5288.2 24.5
14 18.6 3.6 131.4 20844.1 6241.2 26.4
15 8.5 1.6 141.5 24382.4 7311.8 28.4
16 -1.6 -.3 151.6 27970.4 8391.0 30.3
17 -11.7 -2.2 161.7 31558.4 9460.3 32.2
18 -21.8 -4.2 171.8 35146.4 10516.1 34.2
19 -31.9 -6.1 181.9 38734.5 11554.5 36.1
20 -42.0 -8.0 192.0 42322.5 12571.7 38.0
ОРИЕНТИРОВОЧНЫЕ РАЗМЕРЫ ТОРСИОНА:ДИАМЕТР- 43.1 ММ; ДЛИНА-1431.ММ
Исходные данные TOR2
Идентифи-катор |
Наименование параметра |
Возможные значения |
Размерность |
Величина |
N |
Число задаваемых точек приведенной характеристики |
2+20 |
--- |
14 |
DL(j) |
Координаты каждой точки характеристики по перемещению |
0.1+1 000 |
мм |
ORV2 |
A |
Длина балансира |
10+3 000 |
мм |
300. |
Q(j) |
Координаты каждой точки характеристики по силе |
0.1+900 000 |
Н |
ORV2 |
HN |
Расстояние по вертикали от оси качания балансира до оси катка при полной разгрузке подвески |
1 000 |
мм |
150 |
Выходные данные TOR2
I H(MM) F(GRA) DH(MM) QS(H) T(HM) FF(GRA)
1 150.0 30.0 .0 .0 .0 .0
2 147.5 29.4 2.5 2324.7 607.3 .6
3 144.9 28.9 5.1 3152.1 827.9 1.1
4 142.4 28.3 7.6 3979.5 1050.7 1.7
5 139.9 27.8 10.1 4807.0 1275.7 2.2
6 137.4 27.3 12.6 5712.8 1523.6 2.7
7 134.8 26.7 15.2 6661.6 1785.2 3.3
8 132.3 26.2 17.7 7881.8 2122.1 3.8
9 129.8 25.6 20.2 8913.8 2410.9 4.4
10 127.3 25.1 22.7 10632.4 2888.5 4.9
11 124.7 24.6 25.3 12822.2 3498.4 5.4
12 122.2 24.0 27.8 15082.2 4132.2 6.0
13 119.7 23.5 30.3 17714.0 4873.0 6.5
14 117.2 23.0 32.8 20805.4 5746.0 7.0
15 114.6 22.5 35.4 24385.2 6760.4 7.5
16 112.1 21.9 37.9 27979.7 7785.8 8.1
17 109.6 21.4 40.4 31574.2 8817.8 8.6
18 107.1 20.9 42.9 35168.7 9856.0 9.1
19 104.5 20.4 45.5 38763.2 10900.3 9.6
20 102.0 19.9 48.0 42357.7 11950.3 10.1
ОРИЕНТИРОВОЧНЫЕ РАЗМЕРЫ ТОРСИОНА:ДИАМЕТР- 42.4 ММ; ДЛИНА- 374.ММ
Исходные данные TOR3
Идентифи-катор |
Наименование параметра |
Возможные значения |
Размерность |
Величина |
N |
Число задаваемых точек приведенной характеристики |
2+20 |
--- |
14 |
DL(j) |
Координаты каждой точки характеристики по перемещению |
0.1+1 000 |
мм |
ORV3 |
A |
Длина балансира |
10+3 000 |
мм |
300. |
Q(j) |
Координаты каждой точки характеристики по силе |
0.1+900 000 |
Н |
ORV3 |
HN |
Расстояние по вертикали от оси качания балансира до оси катка при полной разгрузке подвески |
1 000 |
мм |
150 |
Выходные данные TOR3
I H(MM) F(GRA) DH(MM) QS(H) T(HM) FF(GRA)
1 150.0 30.0 .0 1530.0 397.5 .0
2 149.4 29.9 .6 2365.1 615.3 .1
3 148.7 29.7 1.3 3200.2 833.7 .3
4 148.1 29.6 1.9 4035.3 1052.8 .4
5 147.5 29.4 2.5 4870.4 1272.4 .6
6 146.8 29.3 3.2 5772.3 1510.1 .7
7 146.2 29.2 3.8 6699.5 1755.0 .8
8 145.6 29.0 4.4 7829.4 2053.7 1.0
9 144.9 28.9 5.1 9279.2 2437.3 1.1
10 144.3 28.8 5.7 10979.1 2887.6 1.2
11 143.7 28.6 6.3 12903.0 3398.1 1.4
12 143.1 28.5 6.9 14981.3 3950.5 1.5
13 142.4 28.3 7.6 17906.7 4728.0 1.7
14 141.8 28.2 8.2 20768.3 5490.7 1.8
15 141.2 28.1 8.8 24263.1 6422.8 1.9
16 140.5 27.9 9.5 27910.5 7397.7 2.1
17 139.9 27.8 10.1 31557.8 8375.0 2.2
18 139.3 27.7 10.7 35205.3 9354.7 2.3
19 138.6 27.5 11.4 38852.6 10336.6 2.5
20 138.0 27.4 12.0 42500.0 11321.0 2.6
ОРИЕНТИРОВОЧНЫЕ РАЗМЕРЫ ТОРСИОНА:ДИАМЕТР- 41.6 ММ; ДЛИНА- 95.ММ
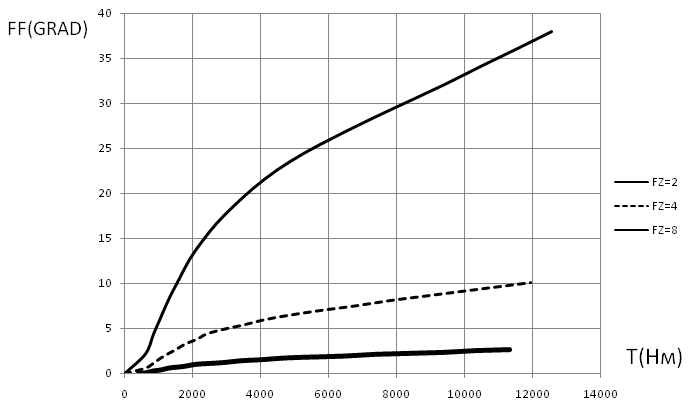
Вывод: При одних и тех же значениях момента закрутки значение угла закрутки торсиона FF увеличивается при уменьшении частоты собственных колебаний с 8 Гц до 2 Гц.