

34. Регулирование скорости двигателя постоянного тока последовательного возбуждения с помощью резисторов. Расчет регулировочных резисторов.
Для получения семейства искусственных характеристик двигателя при Лд= var проведем анализ выражений (4.64) и (4.65).
Так как при I, М —> 0 магнитный поток Ф —> О, а —> °°, то все искусственные характеристики имеют своей вертикальной асимптотой ось скорости. Для определения их расположения относительно естественной характеристики выполним следующие преобразования. Используя (4.64), запишем значения скорости двигателя на естественной и искусственной характеристиках при каком-то любом фиксированном токе якоря I. Найдем отношение этих скоростей, отметив, что поскольку ток один и тот же, то и магнитный поток в том и другом случаях одинаков, а значит, его можно сократить. После простых преобразований получим
 (4.66)
(4.66)
Выражение (4.66) позволяет определить расположение искусственных электромеханических характеристик относительно естественной, так как числитель при Rд > 0 всегда меньше знаменателя, то и он< со,. Другими словами, искусственные электромеханические характеристики 2 при введении в якорь добавочного резистора располагаются ниже естественной 1, причем чем больше Ra, тем больше снижается скорость (рис. 4.34, а).
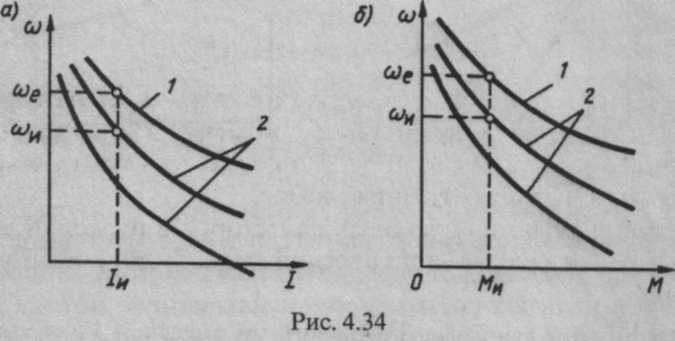
Аналогичный анализ, проведенный для искусственных механических характеристик, показывает, что они подчиняются той же закономерности (см. рис. 4.34, б).
Регулирование скорости двигателя данным способом характеризуется следующими показателями: диапазон 2...3; направление регулирования скорости - вниз; плавность регулирования, определяемая плавностью изменения /?д; стабильность скорости, снижающаяся по мере увеличения /?д; допустимая нагрузка - постоянный момент, равный номинальному; экономическая целесообразность при небольших диапазонах регулирования скорости или кратковременной работе на пониженных скоростях.
Регулирование тока и момента с помощью резисторов характеризуется невысокой точностью при простой схемной реализации.
Рассмотрим способы расчета регулировочных резисторов, включение которых в цепь якоря двигателя позволяет получить требуемую искусственную (одну или несколько) электромеханическую или механическую характеристику. Задача в этом случае формулируется так: при известных паспортных данных двигателя и его естественной характеристике определить значение сопротивления резистора Лд, которое обеспечит прохождение электромеханической или механической характеристики через точку с координатами (со , / ) или
к> ю-
Наиболее простой путь решения этой задачи предусматривает использование формулы (4.66), из которой
 (4.67)
(4.67)
Теперь при заданых координатах (сои, /и) расчитать Ra просто: по естественной характеристике для заданного тока / определяют скорость со, и все имеющиеся данные подставляют в (4.67).
Отметим, что необходимые для расчета значения Л^и Ro в могут быть найдены по справочникам, экспериментально или приближенно по формуле
R^ + ROB = 0,75с7ном(1-Лном)//ном. (4.68)
Если задана точка механической характеристики с координатами (сои, Ми), то сначала по заданному моменту Ми с помощью универсальной характеристики М*(1*) определяется ток /и, а затем повторяется расчет, рассмотренный выше.
Иногда при расчетах пусковых резисторов и пусковой диаграммы используется графоаналитический способ, подробно рассмотренный в [1,7].