

САНКТ-ПЕТЕРБУРГСКИЙ
ПОЛИТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ ПЕТРА
ВЕЛИКОГО
ИНСТИТУТ МЕТАЛЛУРГИИ, МАШИНОСТРОЕНИЯ И ТРАНСПОРТА КАФЕДРА ТЕОРИИ МЕХАНИЗМОВ И МАШИН
"К ЗАЩИТЕ"
__________________________
(подпись преподавателя)
"___"_____________ 20___ г.
РЫЧАЖНЫЙ МЕХАНИЗМ
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА К КУРСОВОМУ ПРОЕКТУ
Разработал:
ст. гр. 23332/1
……………………………….. (А.В.
Лебедев)
Проверил:
преподаватель
………………………………… (Н.С.
Семёнова)
Оценка:
…………………………………
…………………………………
Санкт-Петербург
2018 г.
Оглавление
Введение 3
1. Структурный анализ механизма 4
Схема механизма 4
Структурный анализ 4
План 12 положений 5
2. Геометрический анализ механизма 6
3. Крайнее положение механизма 7
Аналоги скоростей 11
Аналоги ускорений 12
6. Силовой расчет 17
Заключение 18
Список литературы 19
2
Введение
Целью данного курсового проекта является изучение и анализ механизма.
Задачи курсового проекта:
-
Проведение структурного анализа механизма: определение структурных групп, построение графа механизма, построение плана 12 положений механизма;
-
Проведение геометрического и кинематического анализа механизма: определение аналогов скоростей и ускорений, определение особых положений;
-
Проведение кинетостатического анализа механизма: определение масс, моментов инерции связи, сил тяжести, сил инерции и сил моментов;
-
Проведение силового расчета: определение реакций связей во всех кинематических парах и обобщенной движущей силы.
3
-
Структурный анализ механизма
Целью структурного анализа механизма является определение количества звеньев и кинематических пар. А также в задачу структурного анализа входит последовательное разделение механизма на структурные группы.
Схема механизма
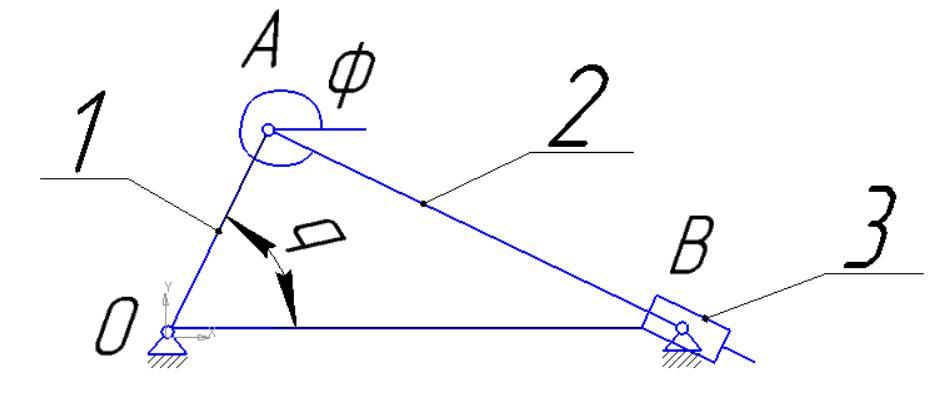
Рисунок 1.1. — Схема механизма
Структурный анализ
Исходя из принципа образования механизма, любой механизм может быть разделен на простые структурные группы. На рисунке 1.2. представлен граф механизма, а на рисунке 1.3. – граф структуры механизма.
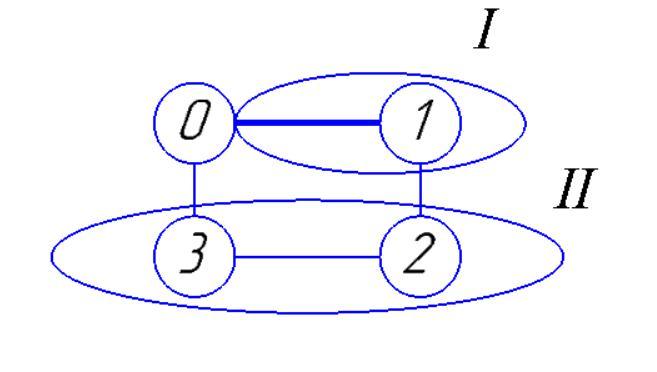
Рисунок 1.2 — Граф механизма
4
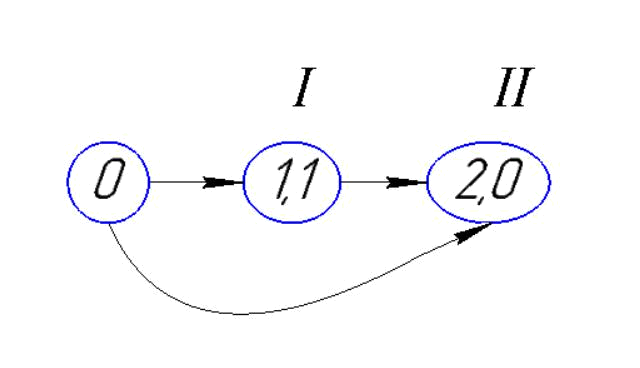
Рисунок 1.3 — Граф структуры механизма
План 12 положений
План 12 положений механизма представлен на рисунке 1.4.
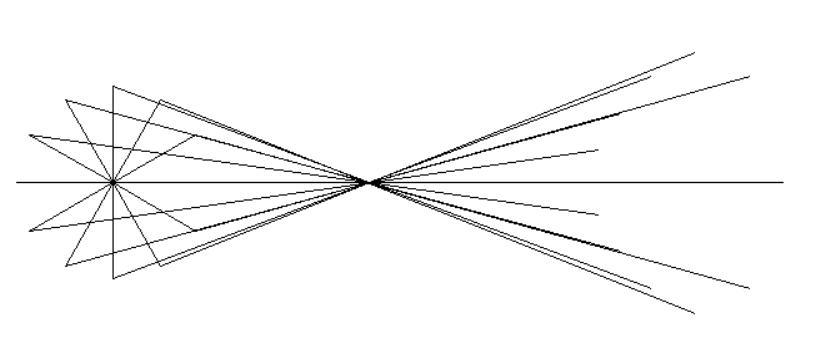
Рисунок 1.4. — План 12 положений механизма
5
-
Геометрический анализ механизма
Целью геометрического анализа рычажного механизма является составление уравнений геометрического анализа, решение их, выделение побочных и основных решений, определяющих положения звеньев, а также исследование функция положения выходных звеньев структурных групп.
Длины звеньев:
l1 0.15
xb 0.4
yb 0
AK 0.9
-
0 0.1 2
Уравнения геометрического анализа:
xa(q) l1cos(q)
ya (q) l1sin(q)
![]()
AB(q) ![]() (xb
l1cos(q))2
(yb
l1sin(q))2
(xb
l1cos(q))2
(yb
l1sin(q))2
cos3 (q) (xb l1cos(q))
![]()
AB(q)
sin3 (q) (yb l1sin(q))
![]()
AB(q)
3 (q) atan2 (cos3 (q) sin3 (q))
6
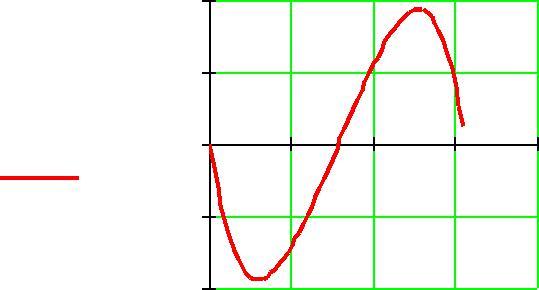
Графики:
|
0.6 |
|
|
|
|
|
|
0.5 |
|
|
|
|
|
|
AB(q) 0.4 |
|
|
|
|
|
|
0.3 |
|
|
|
|
|
|
0.2 |
0 |
2 |
4 |
6 |
8 |
|
|
|
|
q |
|
|

|
0 |
.4 |
|
|
|
|
|
|||
|
0 |
.2 |
|
|
|
|
|
|||
|
sin3 (q) |
0 |
2 |
4 |
6 |
8 |
|
|||
|
|
|
||||||||
|
0.2 |
|
|
|
|
|
||||
|
0 |
.4 |
|
|
|
|
|
|||
|
|
|
|
q |
|
|
|
|||
|
|
30 |
|
|
|
|
|
|||
|
3 (q) |
15 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
||||
|
deg |
0 |
2 |
4 |
6 |
8 |
|
|||
|
|
15 |
|
|
|
|
|
|||
|
|
30 |
|
|
|
|
|
|||
|
|
|
|
q |
|
|
|
|||
|
3. Крайнее положение механизма |
|
|
|
|
|||||
xk(q) l1cos(q) AKcos(3 (q))
Xk'' (q) d2 xk(q)
dq2
![]()
yk (q) l1sin(q) AKsin(3 (q))
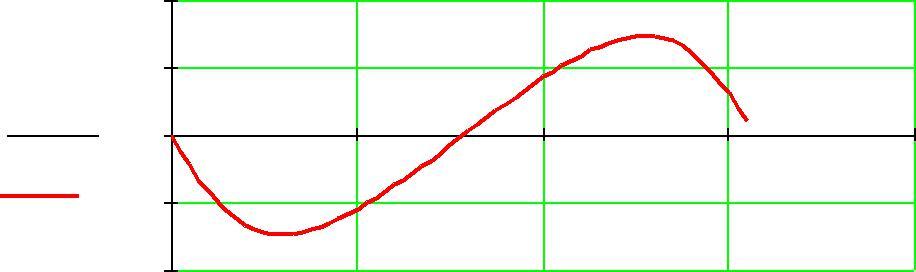
График изменения выходной координаты представлен рисунке 3.1.
|
0.3 |
|
|
|
|
|
|
0.15 |
|
|
|
|
|
|
yk(q) |
2 |
4 |
6 |
8 |
|
|
0 |
|
||||
|
0.15 |
|
|
|
|
|
|
0.3 |
|
|
|
|
|
|
|
|
q |
|
|
|
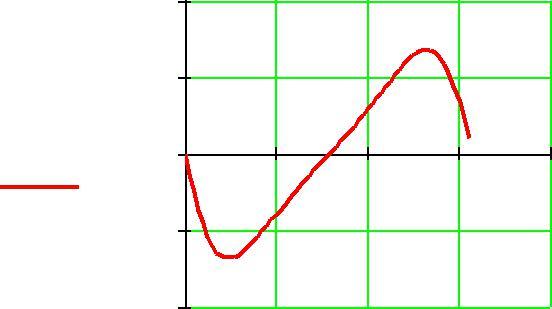
Рисунок 3.1. — График выходной координаты
7
По графику найдем максимальное и минимальное значение q, при которых выходная координата принимает максимальные и минимальные значения, что и будет соответствовать крайним положениям.
|
Первое крайнее положение: |
Второе крайнее положение: |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
q 5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
q 2 |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
q1 Maximize (yk q) |
|
q2 Minimize (yk q) |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
q1 5.318 |
|
|
|
|
|
|
|
|
|
|
|
q2 0.966 |
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
q1 |
180 |
|
304.673 |
|
|
q2 |
180 |
55.327 |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Значение скоростей для 30 градусов. |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
q |
|
|
|
|
|
|
|
|
|
10 |
|
Pva 0.10 |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
vba 0.07006 |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Va l1 1.5 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
Vb vbKv 1.07 |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
Va |
|
|
|
|
|
|
|
|
|
|
ab 0.07006 0.07 |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Kv |
|
|
|
15 |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Pva |
|
|
AB(q) |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
vbaKv |
|
|
|
|
|
Ks |
|
4.001 |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2 |
|
3.749 |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
ab |
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
AB(q) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Значение ускорений для 30 градусов. |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Wa l1 |
2 |
|
15 |
|
|
|
Pwa 0.10 |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Kw |
|
|
|
|
Wa |
|
|
150 |
|
|
|
wbat 0.12434 |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
Pwa |
|
|
|
|
wbp 0.09633 |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
wk 2Vb |
2 |
0.053 |
|
|
3'' |
(q) |
2 |
66.809 |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Kw |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
wban 2 |
|
2 |
|
AB(q) |
0.02627 |
|
AB'' (q) 2 14.451 |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
Kw |
|
|
|
Wbp wbpKw 14.45 |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
wbatKw |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
2 |
|
66.536 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
ab 0.11097 |
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
AB(q) |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Ks |
|
|
AB(q) |
2.526 |
|
|
|
|
ak |
AK |
|
0.356 |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
ab |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ks |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
![]()
![]()
![]()
![]()
![]()
Значение скоростей для крайнего положения.
|
Va l1 1.5 |
Pva 0.10 |
|
||
|
Kv |
Va 15 |
vba 0 |
|
|
|
|
Pva |
|
|
|
|
2 |
vbaKv 0 |
vb 0.1 |
|
|
|
3' (q) 3.749 |
|
|||
|
|
AB(q) |
|
||
|
Vb vbKv 1.5 |
AB' (q) 1.07 |
|
||
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Значение ускорений для крайнего положения.
|
Wa l1 2 15 |
Pwa 0.10 |
|
|
|
|
||||||||||||||
|
Kw |
Wa |
150 |
wban 2 |
2 |
|
AB(q) |
0 |
|
|||||||||||
|
Pwa |
|
Kw |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
2 |
|
wbat 0.1 |
|
|
|
|
|
||||||||||
|
wk 2Vb Kw 0 |
|
|
|
|
|
||||||||||||||
|
wbp 0 |
|
|
|
|
|
||||||||||||||
|
wbatKw |
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||
|
2 |
AB(q) |
53.511 |
3'' (q) 2 66.809 |
|
|
||||||||||||||
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
|
q q1 |
AB'' (q) |
2 3.793 |
|
|
|
|
![]()
Wbp wbpKw 0
![]()
Крайние положения изображены на рисунке 3.2. и 3.3.

Рисунок 3.2. — Крайнее положение для 30 градусов
9
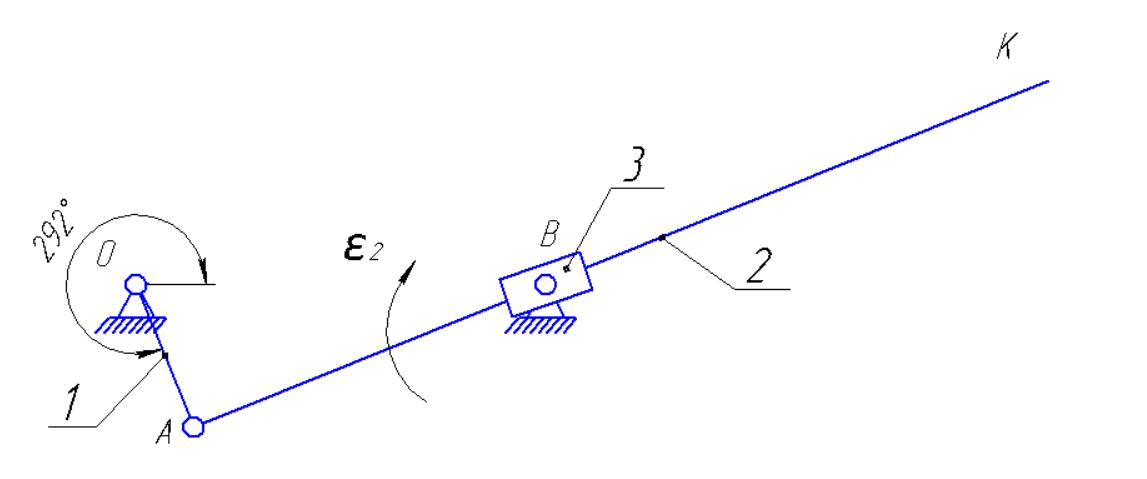
Рисунок 3.3. — Крайнее положение
10