

2.2.2. Матрицы переходов, выходов
Матрицы в отличие от таблиц характеризуются однородностью обозна -чений строк и столбцов. Строки матриц соответствуют предыдущим состоя-
ниям (ПС), а столбцы - данным состояниям (ДС).
Р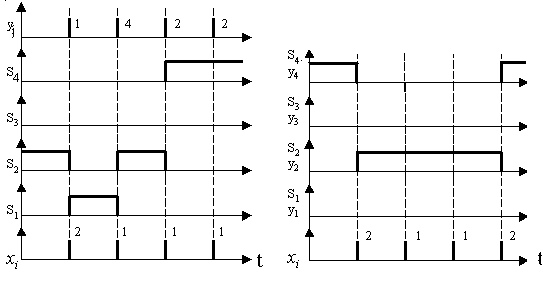 ис.13.
Диаграммы работы ЦА Мили Рис.14. Диаграммы
работы ЦА Мура
ис.13.
Диаграммы работы ЦА Мили Рис.14. Диаграммы
работы ЦА Мура
Матрицы переходов (МП) для обоих автоматов аналогичны, применительно к рассматриваемым примерам они должны иметь по 4 строки и по 4 столбца. На пересечениях МП размещаются входные сигналы.
Табл.10 является МП ЦА Мили , а табл.11 - МП ЦА Мура. Видно, что имеются пустые пересечения. В строке не могут использоваться одинаковые элементы. Этого ограничения нет для столбцов.
Очевидно, что чистой МВ для автоматов не получится, так как без входных сигналов xi матрица теряет смысл. Поэтому МВ на рис.9 зачеркнута.
Если в матрицах переходов автоматов Мили и Мура на пересечениях разместить и выходные сигналы (xi / yj и xi / yt), то получатся совмещенные матрицы переходов и выходов (СМП и В).
Такая матрица для ЦА Мили показана в табл.12. В ней по отношению к выходным сигналам никаких ограничений нет.
СМП и В для ЦА Мура представлена табл.13. Естественно, что в ней имеется ограничение на выходные сигналы: индексы у выходных сигналов в столбце являются одинаковыми, они совпадают с индексом данного состояния, соответствующему рассматриваемому столбцу.
Так фиксировать выходные сигналы не только нецелесообразно, но даже и некрасиво. С учетом этого СМП и В для ЦА Мура на рис.9 обведена пунктирно.
Поэтому для ЦА Мура целесообразна отмеченная матрица переходов (ОМП). Переходы в такой матрице фиксируются на пересечениях, а выходные сигналы - под обозначениями данных состояний в верхней части матрицы (табл.14).
Условия корректности отмеченной матрицы переходов по отношению к входным сигналам совпадают с условиями корректности СМП и В ЦА Мили.
Таблица 10
МП ЦА Мили
-
 ДС
ДСПС
s1
s2
s3
s4
s1
x1
x2
s2
x2
x1
s3
x1
x2
s4
x2
x1
Таблица 11
МП ЦА Мура
-
 ДС
ДСПС
s1
s2
s3
s4
S1
x2
x1
s2
x1
x2
s3
x1
x2
s4
x1
x2
2.2.3. Графы автоматов
Граф ЦА (ГА) - ориентированный граф, у которого в качестве вершин используются состояния, а в качестве дуг - переходы. В начале дуги фиксируется входной сигнал. Что касается выходного сигнала, то он для ЦА Мили ставится на конце дуги (рис.15), а для ЦА Мура внутри вершины (рис.16).
Таблица 12
СТП и В ЦА Мили
-
 ДС
ДСПС
s1
s2
s3
s4

 s1
s1x1
y4
x2
y3


 s2
s2x2
y1
x1
y2
 s3
s3x1
y4
x2
y3

 s4
s4x2
y1
x1
y2
Таблица 13
СТП и В ЦА Мура
-
 ДС
ДСПС
s1
s2
s3
s4

 s1
s1x2
y2
x1
y3



 s2
s2x1
y2
x2
y4
s3
x1
y1
x2
y2

 s4
s4x1
y1
x2
y2
Таблица 14
ОМП
-

 ДС
ДСПС
s1
y1
s2
y2
s3
y3
s4
y4
s1
х2
х1
s2
х1
х2
s3
х1
х2
s4
х1
х2
Р ис.15.
ГА Мили Рис.16. ГА Мура
ис.15.
ГА Мили Рис.16. ГА Мура
Условия корректности для ГА Мили можно сформулировать следующим образом:
1) при выходе из данного состояния должны использоваться разные входные сигналы;
2) при заходе в данные состояния допускаются одинаковые входные сигналы;
3) при заходе в данное состояние разрешаются одинаковые выходные сигналы.
Условия корректности для ГА Мура являются не сколько другими:
1) при выходе из данного состояния должны использоваться разные входные сигналы;
2) при заходе в данные состояния могут использоваться одинаковые входные сигналы;
3) при заходе в данное состояние должны быть одинаковые выходные сигналы.
Можно заметить, что если в ЦА Мили при заходе в каждое состояние имеются одинаковые выходные сигналы, то такой ЦА можно легко преобразовать в автомат Мура. Что касается преобразования автомата Мура в автомат Мили, то для этого достаточно перенести выходные сигналы из вершин на концы дуг.