

3.3.3 Условия теоремы Куна-Таккера
Условие задания:


Составляем функцию Лагранжа:

здесь
 – левые части ограничений, приведенных
к нулевой правой части;
– левые части ограничений, приведенных
к нулевой правой части; – неопределенные множители Лагранжа.
– неопределенные множители Лагранжа.

Точка
экстремума является седловой точкой с
минимумом по xи
максимумом по,
поэтому ограничения приведены к виду :
:

Условия теоремы Куна – Таккера записываем следующим образом:


Частные производные функции Лагранжа определяются выражениями:



Для того, чтобы вышеуказанные выражения имели вид равенств, введем в них дополнительные переменные:

Решение этой системы из четырех алгебраических уравнений, содержащих восемь неизвестных, можно найти с помощью симплекс-процедуры. На первом шаге в базис включаются все введенные дополнительные переменные. Строка для функции цели отсутствует.
Проведем симплекс – преобразования и найдем допустимое базисное решение. Если решение удовлетворяет условию оптимальности:

то оно является оптимальным.
Таблица 3.5

Таблица 3.6

Таблица 3.7
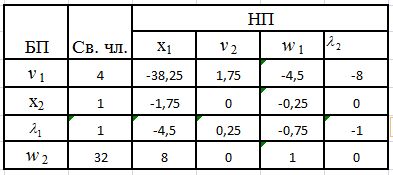
Полученное решение удовлетворяет следующим условиям:

Следовательно, координаты точки экстремума x*:
 ;
;
А функция цели в этой точке имеет значение:

4 Тексты программ в среде matlab
4.1 Математическое описание линейных систем
>> w=tf([1200 0],[1 18 95 150])
Transfer function:
1200 s
-------------------------
s^3 + 18 s^2 + 95 s + 150
>> pole(w)
ans =
-10.0000
-5.0000
-3.0000
>> zpk(w)
Zero/pole/gain:
1200 s
------------------
(s+10) (s+5) (s+3)
>> ss(w)
a =
x1 x2 x3
x1 -18 -5.938 -2.344
x2 16 0 0
x3 0 4 0
b =
u1
x1 8
x2 0
x3 0
c =
x1 x2 x3
y1 0 9.375 0
d =
u1
y1 0
Continuous-time model.
>> ch=[1200 0]
ch =
1200 0
>> zn=[1 18 95 150]
zn =
1 18 95 150
>> [x]=residue(ch,zn)
x =
-342.8571
600.0000
-257.1429
>> [c]=residue(ch,[zn,0])
c =
34.2857
-120.0000
85.7143
0
>>step(w)

Рисунок 4.1 – Переходная характеристика h(t)
>>impulse(w)

Рисунок 4.2 – Импульсная переходная характеристика w(t)
>>nyquist(w)

Рисунок 4.3 - АФЧХ системы
>>margin(w)

Рисунок 4.4 - ЛАЧХ и ЛФЧХ системы
>> M=[1 1 1; -3 -5 -10; 9 25 100]
M =
1 1 1
-3 -5 -10
9 25 100
>> inv(M)
ans =
3.5714 1.0714 0.0714
-3.0000 -1.3000 -0.1000
0.4286 0.2286 0.0286
>> B=[0;1200;-21600]
B =
0
1200
-21600
>> M^-1*B
ans =
-257.1429
600.0000
-342.8571
4.2 Линейное программирование
>> F=[1 5 3];
A=[5 0 -5;0 -5 -4; -4 5 2; -1 0 0; 0 -1 0 ; 0 0 -1 ];
B=[9;-42;9;0;0;0];
Aeq=[-5 4 -1];
Beq=[-3];
x=linprog(F,A,B,Aeq,Beq)
Exiting: One or more of the residuals, duality gap, or total relative error
has stalled:
the primal appears to be infeasible and the dual unbounded since
the dual objective > 1e+10
and the primal objective > -1e+6.
Решение двойственной задачи:
>> F=[-3 9 -42 9];
>> A=[5 -5 0 4; -4 0 5 -5; 1 5 4 -2; 0 -1 0 0; 0 0 -1 0; 0 0 0 -1];
B=[1;5;3;0;0;0];
>> x=linprog(F,A,B)
Exiting: One or more of the residuals, duality gap, or total relative error
has grown 100000 times greater than its minimum value so far:
the dual appears to be infeasible (and the primal unbounded).
(The primal residual < TolFun=1.00e-008.)