

3.2.2 Метод Ньютона-Рафсона
Условие задания:

 =[1;3]
=[1;3]
Данный метод дает решение задачи за 1 шаг. Очередная точка поиска вычисляется в соответствии с выражением:

где
 – матрица Гессе функции
– матрица Гессе функции ;
; – обратная по отношению к
– обратная по отношению к матрица.
матрица.
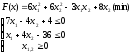
Градиент F(x):
 ;
;
 .
.

где det H – определитель матрицыH;AdjH– присоединенная кHматрица (транспонированная матрица алгебраических дополнений).
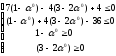
Найдем определитель матрицы Гессе:

Найдем транспонированную матрицу алгебраических дополнений AdjH:

Теперь найдем матрицу обратную по
отношению к
 - матрицу
- матрицу :
:

тогда:


Следовательно,
в точке
 функцияF(x)достигает максимального значения:
функцияF(x)достигает максимального значения:
3.3 Нахождение экстремального значения функцииF(X) с учетом системы ограничений задачи
3.3.1 Метод допустимых направлений Зойтендейка
Условие задания:


 .
.
Тогда координаты очередной точки:

Здесь решение совпадает с первой итерацией метода наискорейшего спуска (Подъёма), тогда:

Определяем интервал допустимых значений для 0, при котором точкаx1будет принадлежать ОДЗП. Для этого подставим координаты точкиx1в ограничения задачи:
 =>
=> 

Тогда:

Находим величину
 ,которая
обеспечит экстремум функцииF(x).
Воспользуемся уже найденным
,которая
обеспечит экстремум функцииF(x).
Воспользуемся уже найденным =
= ,
но т.к. оно не входит в наш интервал, то
,
но т.к. оно не входит в наш интервал, то =
= При этом очередная точка
При этом очередная точка поисковой траектории оказывается на
границе области. Координаты точки
поисковой траектории оказывается на
границе области. Координаты точки и значение градиента функции в этой
точке
и значение градиента функции в этой
точке определяются выражениями
определяются выражениями


Движение в направлении антиградиента
 выводит
за пределы ОДЗП, поэтому очередную точку
поиска вычисляем исходя из выражения:
выводит
за пределы ОДЗП, поэтому очередную точку
поиска вычисляем исходя из выражения:

где
 - новое направление, которое составляет
минимальный острый угол с вектором
градиента и направлено либо внутрь,
либо по границе ОДЗП. При этом очередная
точка должна принадлежать ОДЗП, а функция
цели при переходе к очередной точке
должна уменьшаться максимальным образом.
- новое направление, которое составляет
минимальный острый угол с вектором
градиента и направлено либо внутрь,
либо по границе ОДЗП. При этом очередная
точка должна принадлежать ОДЗП, а функция
цели при переходе к очередной точке
должна уменьшаться максимальным образом.
Направление
 находим, как решение задачи:
находим, как решение задачи:

Найдем направление
 очередного шага: т.к.x1лежит на
очередного шага: т.к.x1лежит на ,
то условие
,
то условие (где
(где - вектор коэффициентов при переменных
в первом ограничении, на котором находится
точкаx1) запишется:
- вектор коэффициентов при переменных
в первом ограничении, на котором находится
точкаx1) запишется:



При движении из точки x1
в точкуx2 следует
двигаться по граничной прямой в
направлении .
.
Координаты точки x2определяются выражением:

или

Находим интервал изменения , при котором
точка принадлежит ОДЗП, причем ограничение
 отбросим:
отбросим:

Получим интервал:

Найдем такое 1, которое обеспечит максимумF(x)в направлении .
Для этого координаты точкиx2
подставляются в функциюF(x),тогда:
.
Для этого координаты точкиx2
подставляются в функциюF(x),тогда:


Значение 1 не принадлежит ранее найденному
интервалу, поэтому для расчета координат
точки принимается =
= :
:

Вычисляются составляющие вектора градиента в точке x2:

Вектор градиента не перпендикулярен вектору S1, но при выборе дальнейшего направления из условия:

И при движении вдоль оси ординат не происходит улучшения экстремального значения функции, следовательно, мы находимся в точке экстремума функции с учетом ограничений. А значение функции цели в этой точке равно:

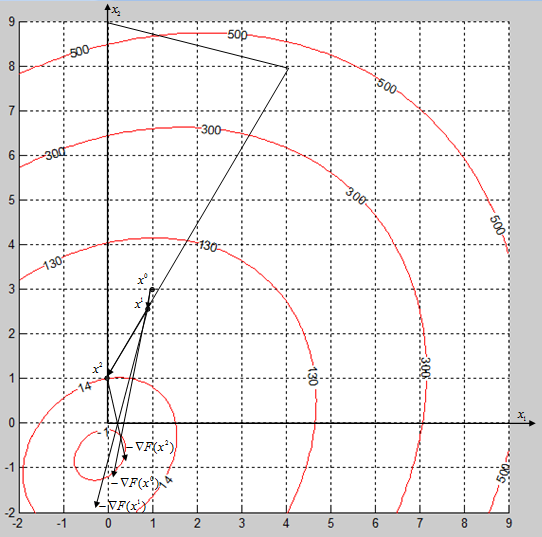
Рисунок 3.3 - Графическая интерпретация метода допустимых направлений Зойтендейка
3.3.2 Метод линейных комбинаций
Условие задания:

Вычислим градиент функции F(x):
 ;
;
.
На следующем этапе вычислим значение градиента в точке x0:

Суть метода линейных комбинаций заключается в линеаризации функции F(x) и замене ее линейной функцией в соответствии с выражением:

Решаем
задачу линейного программирования
 при следующих ограничениях:
при следующих ограничениях:

Процедура решения задачи иллюстрируется следующей симплекс таблицей:
Таблица 3.1

Таблица 3.2

Получено оптимальное допустимое решение, которое имеет вид:

Произведем корректировку найденного решения в соответствии с выражением:


Найдем значение
 ,
которое доставляет экстремальное
значение функцииF(x1):
,
которое доставляет экстремальное
значение функцииF(x1):


Определяем интервал допустимых значений для 0, при котором точкаx1будет принадлежать ОДЗП. Для этого подставим координаты точкиx1в ограничения задачи:
 =>
=>

Тогда:

Величина
 ,
не входит в наш интервал, тогда
,
не входит в наш интервал, тогда =1.
Координаты точки
=1.
Координаты точки и значение градиента функции в этой
точке
и значение градиента функции в этой
точке определяются выражениями
определяются выражениями


Линеаризуем функцию F(x) относительно точки x1 и заменим ее линейной функцией w(x1):

Решаем задачу линейного программирования при следующих ограничениях:

Процедура решения задачи иллюстрируется следующей симплекс таблицей:
Таблица 3.3

Таблица 3.4

Решение данной таблицы допустимо и оптимально, следовательно решение имеет вид:

Так как полученная точка является точкой предыдущего шага, следовательно, нет продвижения к точке экстремума, мы находимся в точке экстремума задачи с учетом ограничений.
Значение функции цели в этой точке равно:


Рисунок 3.4 - Графическая интерпретацияметода линейных комбинаций.