

6.3. Проверка влияния параметра на качество переходного процесса
В VisSim в пункте меню «Blocks» -> выбор палитры «Signal Produser» -> выбор пункта «const» -> это постоянный сигнал.
![]()
Щелчком правой кнопки мыши открывается окно задания значения постоянного сигнала.
Это значение задаётся равным установившемуся значению выходного управляемого сигнала, определённому в п. 6.1. Значение должно быть определено как можно точнее на развёрнутом на весь экран графике. По щелчку правой кнопкой мыши на графике в окне настроек на вкладке «Options» нажать «Read Coordinates» и навести курсор на установившуюся линию графика. В нижнем левом углу графика отобразятся координаты положения курсора. Значение координаты «Y» и есть установившееся значение.
На выходе правого элемента «summingJunction» разница между установившимся и текущим значением выходного сигнала – динамическая ошибка.
В VisSim в пункте меню «Blocks» -> выбор палитры «Arithmetic» -> выбор пункта «pow» -> это возведение в степень.
![]()
Щелчком правой кнопки мыши открывается окно задания значения степени. Оставить по умолчанию 2. На выходе элемента квадрат динамической ошибки.
В VisSim в пункте меню «Blocks» -> выбор палитры «Integration» -> выбор пункта «integrator» -> это интегрирование сигнала.
![]()
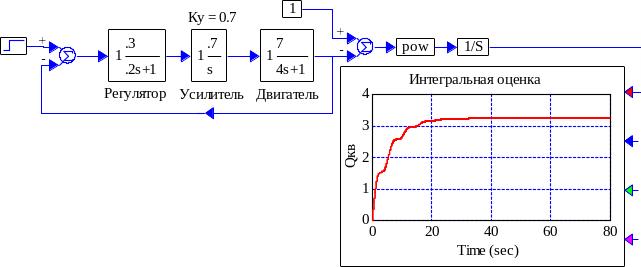
На выходе элемента интеграл квадратов динамических ошибок – квадратичная интегральная оценка.
При
моделировании подтвердилось, что для
оптимального значения параметра
интегральная квадратичная оценка
накапливается до величины (62) примерно
![]() .
.
Это подтверждает правильность определения интегральной квадратичной оценки (48) в пункте 4.2.
6.4. Проверка влияния параметра на качество установившегося режима
В VisSim в пункте меню «Blocks» -> выбор палитры «Signal Produser» -> выбор пункта «ramp» -> это линейно растущий сигнал.
![]()
Щелчком
правой кнопки мыши открывается окно
задания значения коэффициента роста
сигнала в поле «Slope».
Оставить по умолчанию 1 – функция
входного сигнала
![]() (см. п. 4.3, выражение
(57)).
(см. п. 4.3, выражение
(57)).
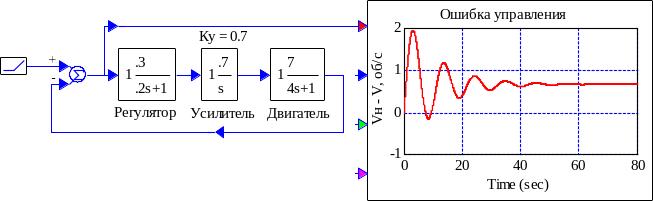
При
моделировании подтвердилось, что для
оптимального значения параметра
и при линейно растущем входном сигнале
![]() ошибка управления устанавливается на
величине (63) примерно
ошибка управления устанавливается на
величине (63) примерно
![]() .
.
Это подтверждает правильность определения установившейся ошибки (58) в пункте 4.3.
6.5. Частотные режимы работы системы управления
В VisSim в пункте меню «Blocks» -> выбор палитры «Signal Produser» -> выбор пункта «sinusoid» -> это синусоидальный сигнал.
![]()
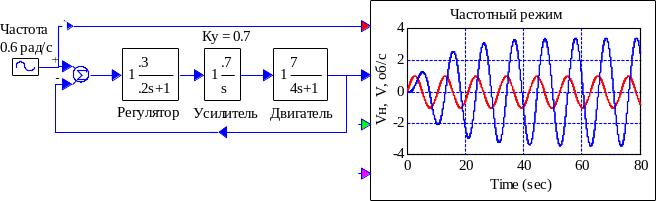
Щелчком правой кнопки мыши открывается окно задания параметров сигнала. В поле «Time Delay(sec)» оставить по умолчанию 0 – фаза входного сигнала принята (см. п. 5.5, выражение (75)). В поле «Frequency(Rad/Sec)» записать значение 0.6 – частота входного сигнала принята (см. п. 5.5, выражение (76)). В поле «Amplitude» оставить по умолчанию 1 – амплитуда входного сигнала принята (см. п. 5.5, выражение (74)).
На график вывести оба сигнала: входной и выходной.
Время
переходного частотного режима составило
примерно
![]() .
.
При
моделировании подтвердилось, что для
оптимального значения параметра
при резонансной частоте (76)
установившееся
усиление амплитуды выходного сигнала
(79), (80) равно примерно
![]() .
.
Сдвиг фазы выходного сигнала относительно входного, как и усиление по амплитуде подтверждают расчётный график установившегося частотного режима из п. 5.5.
Это подтверждает правильность определения частотных характеристик в разделе 5.