




 Министерство
транспорта Российской Федерации
Министерство
транспорта Российской Федерации
Федеральное агентство железнодорожного транспорта
Федеральное Государственное бюджетное
образовательное учреждение высшего профессионального образования
«Дальневосточный Государственный
университет путей сообщения»
Кафедра «Транспортно-технологические комплексы»
КУРСОВАЯ РАБОТА
по дисциплине «Теория механизмов и машин»
на тему «Исследование рычажного механизма»
КР 23.05.03.07.00.125 ПЗ
Студент гр.125 Землянский М.А.
Руководитель Поспелов А.И.
Хабаровск – 2019
Оглавление
Введение 3
1.Структурный анализ рычажного механизма 4
2.Кинематическое исследование рычажного механизма 6
2.1. Построение плана скоростей 7
2.2 Построение плана ускорений 10
3.Кинетостатический расчёт рычажной механизма 14
3.1.Определение нагрузок 14
3.2.Расчет сил инерции звеньев механизма 16
3.3.Расчет группы звеньев 2-3 17
3.4. Расчёт группы звеньев 4-5 18
3.5. Расчет входного звена 20
4.Заключение 21
5.Список используемой литературы 22
Введение
Механизмом называется система звеньев, предназначенная для преобразования движения одного или нескольких из них в требуемое движение других звеньев
Объектом исследования данного курсового проекта является рычажной механизм дизель воздуходувной установки.
Для реализации целей курсового проекта были решены следующие задачи:
- проведен разносторонний анализ рычажного механизма;
- начерчены соответствующий заданию план скоростей и план ускорений;- произведён силовой расчет в заданном положении.
Работа состоит из введения, пояснительной записки и чертежа.
-
Структурный анализ рычажного механизма
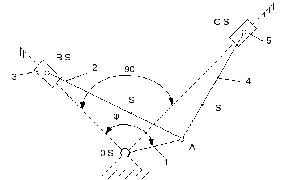
Рисунок 1 Схема рычажного механизма 1- кривошип
2,4- шатуны 3,5- ползуны
Определяем степень подвижности по формуле Чебышева

где
n-число
подвижных звеньев: n=5,
P-число
кинематических пар:
 ,
,

 (1.1)
(1.1)
Из соотношения (1.1) следует, что кинематическая цепь должна иметь одно входное звено – кривошип 1, чтобы движение всех остальных звеньев было бы определенным
-
Разбиваем механизм на группы Ассура

Рисунок 2. Основной механизм Ассура
Определяем степень подвижности по формуле Чебышева

где
n-число
подвижных звеньев: n=1,
P-число
кинематических пар:
 ,
,



Рисунок 3 Группа Ассура 2-3
Определяем степень подвижности по формуле Чебышева

где
n-число
подвижных звеньев: n=2,
P-число
кинематических пар:
 ,
,


Группа второго класса, второго порядка.

Рисунок 4 Группа Ассура 4-5
Определяем степень подвижности по формуле Чебышева

где
n-число
подвижных звеньев: n=2,
P-число
кинематических пар:
 ,
,


Группа второго класса, второго порядка.
Поскольку обе группы Ассура являются группами 2-го класса, то механизм относится к механизму 2-го класса
-
Кинематическое исследование рычажного механизма
Исходные данные:
– схема рычажного механизма дизель воздуходувной установки.
ℓ𝑂𝐴=0,09 м, ℓ𝐴𝐵= ℓ𝐶𝐷=0,36 м,
– частота равномерного вращения входного кривошипа 𝑛=1800 об/мин;
– положение механизма для расчета соответствует обобщенной координате 𝜑=30°.
Определим масштабный коэффициент, как отношение реальной длины звена к длине отрезка на чертеже в мм.
Пусть
на чертеже ОА=30 мм, из условия задания
 =0,09
м
=0,09
м
Масштабный коэффициент
 ,
м/мм, находим по формуле
,
м/мм, находим по формуле
 (2.1)
(2.1)
где
 – истинный размер звена OA,
мм; ОА– размер звена OA
на чертеже, мм.
– истинный размер звена OA,
мм; ОА– размер звена OA
на чертеже, мм.
 м/мм.
м/мм.
Определяем масштабные значения
 мм, длин звеньев по формуле
мм, длин звеньев по формуле
 (2.2)
(2.2)
Подставив значения в формулу (2.2) получим:
Методом засечек строим план механизма
для заданного положения
 .
Число планов, соответствующих полному
обороту кривошипа OA,
примем 12. Строим остальные одиннадцать
планов механизма для последовательных
равноотстоящих положений входного
звена.
.
Число планов, соответствующих полному
обороту кривошипа OA,
примем 12. Строим остальные одиннадцать
планов механизма для последовательных
равноотстоящих положений входного
звена.
Находим последовательно положения центров масс S звеньев и, соединяя эти точки плавными линиями, строим их траектории движения.
Вычерчиваем отдельно кинематическую
схему механизма для заданного положения
входного звена
 .
Исследование кинематики механизма
выполняем с помощью планов скоростей
и ускорений.
.
Исследование кинематики механизма
выполняем с помощью планов скоростей
и ускорений.